棱镜测试用固定治具的制作方法
1.本实用新型涉及棱镜测试领域,具体涉及棱镜测试用固定治具。
背景技术:
2.潜望式摄像头为了满足ttl需要使用棱镜器件将光折射,为了满足等腰直角三棱镜在
±
15
°
实现透光要求,测试过程中需要切换等腰直角三棱镜的角度;现有的切换方式是完成一个角度的测试后,重新摆放等腰直角三棱镜,并调整光源、即光线的位置,直至完成棱镜45
°
时、棱镜30
°
时以及棱镜60
°
时的测试,这样的方式光线不能在一个角度满足三个角度的测试,而且重新摆放等腰直角三棱镜后光线可能打偏,探测器可能无法完整接收到等腰直角三棱镜反射面反射出来的光线,从而导致透光测试不准确。
技术实现要素:
3.本实用新型的目的在于提供一种光线位置不变时满足等腰直角三棱镜三个角度的测试,而且有利于提高透光测试准确性的治具。
4.为达到上述目的,本实用新型的技术方案提供棱镜测试用固定治具,包括机架、治具本体和夹持机构,夹持机构用于夹持治具本体且夹持机构与机架转动连接,治具本体上设有呈45
°
的斜面。
5.本方案的技术效果是:将等腰直角三棱镜的底面与斜面相贴,由于等腰直角三棱镜是通过反射实现透光,45
°
相当于是棱镜的0
°
,即光线垂直于等腰直角三棱镜的侧面(等腰直角三棱镜的腰)入射;30
°
相当于棱镜的-15
°
;60
°
相当于棱镜的+15
°
。分别对应关系为:棱镜45
°
时,探测器接收角度为90
°
;棱镜转动15
°
时,即棱镜30
°
时,探测器接收角度为60
°
;棱镜转动-15
°
时,即棱镜60
°
时,探测器角度为120
°
。因此在入射的光线位置不变时,能够满足等腰直角三棱镜三个角度(棱镜45
°
、棱镜30
°
、棱镜60
°
)的测试,而且探测器能完整接收到等腰直角三棱镜反射出来的光线,从而提高透光测试的准确性。
6.进一步的,夹持机构包括第一夹持单元和第二夹持单元,第一夹持单元包括支撑板和第一夹持板,第二夹持单元包括锁止板和第二夹持板,第一夹持板上设有两根导杆,锁止板上设有两个套管,套管和第二夹持板均与导杆滑动连接,锁止板上还设有锁止件。本方案的技术效果是:通过将治具本体放置于第一夹持板和第二夹持板之间,同时治具本体位于两根导杆之间,通过锁止件将锁止板固定后,锁止板与第二夹持板相抵,从而稳定夹持住治具本体。
7.进一步的,锁止板和第二夹持板分离,导杆上套有弹性件,第二夹持板和套管通过弹性件连接。本方案的技术效果是:第二夹持板与治具本体接触时有缓冲,避免损坏治具本体。
8.进一步的,支撑板上固定有转动杆,转动杆转动设置于机架上,光线与等腰直角三棱镜的接触点位于转动杆的轴线延长线上。本方案的技术效果是:确保治具本体转动的过程中光线始终与等腰直角三棱镜的侧面接触,无需限定治具本体的体积足够大,也不会出
现光线打偏的情况。
9.进一步的,支撑板上设有滑槽,锁止件能与滑槽的侧壁接触。本方案的技术效果是:锁止件与滑槽的底部以及侧壁均接触有利于提高锁紧效果。
10.进一步的,治具本体上还设有台阶面,台阶面与斜面垂直。本方案的技术效果是:台阶面能对等腰直角三棱镜进行支撑,有利于提高等腰直角三棱镜的稳定性。
11.进一步的,台阶面上设有用于放置等腰直角三棱镜的凹槽。本方案的技术效果是:便于定位使得光线与等腰直角三棱镜的接触点自动位于转动杆的轴线延长线上。
12.进一步的,机架上设有定位杆,锁止板上设置有角度线。本方案的技术效果是:便于对夹持机构和治具本体的转动角度进行标示。
附图说明
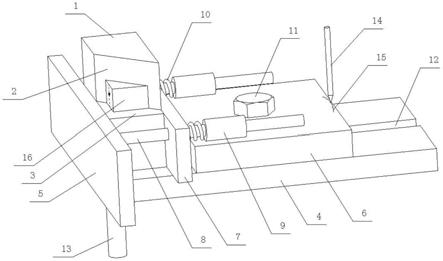
13.图1为本实用新型实施例的三维示意图;
14.图2为45
°
棱镜、30
°
棱镜、60
°
棱镜的示意图。
具体实施方式
15.下面通过具体实施方式进一步详细说明:
16.说明书附图中的附图标记包括:治具本体1、斜面2、台阶面3、支撑板4、第一夹持板5、锁止板6、第二夹持板7、导杆8、套管9、弹性件10、锁止件11、滑槽12、转动杆13、定位杆14、角度线15、等腰直角三棱镜16。
17.实施例:
18.实施例基本如附图1、2所示:如图1所示的棱镜测试用固定治具,包括机架、治具本体1和夹持机构,治具本体1上设置有台阶面3以及呈45
°
的斜面2,台阶面3与斜面2垂直,台阶面3上开有用于放置等腰直角三棱镜16的凹槽。
19.夹持机构包括第一夹持单元和第二夹持单元,第一夹持单元包括支撑板4和第一夹持板5,第二夹持单元包括锁止板6和第二夹持板7;支撑板4和第一夹持板5焊接,第一夹持板5上焊接有两根导杆8;锁止板6上焊接有两个套管9,套管9和第二夹持板7均与导杆8滑动连接,即第二夹持板7上开有通孔,导杆8穿过通孔。
20.锁止板6和第二夹持板7未连接于一体,导杆8上套有弹性件10,第二夹持板7和套管9通过弹性件10连接,弹性件10为弹簧或拉簧,本实施例中选用弹簧,即弹簧的一端与第二夹持板7焊接,弹簧的另一端与套管9的端部焊接。锁止板6上设有锁止件11,锁止件11为螺栓或螺钉,本实施例中选用螺栓,即锁止板6上开有螺纹孔,螺栓与螺纹孔螺纹连接,支撑板4上开有滑槽12,螺栓的尾部能与滑槽12的底部以及滑槽12的侧壁接触。
21.支撑板4上焊接有转动杆13,机架上通过螺栓固定有伺服电机(图中未示出),伺服电机的型号可以选用mr-j2s-20a,转动杆13与伺服电机的输出轴焊接或法兰连接;转动杆13的轴线延长线位于等腰直角三棱镜16的侧面(等腰直角三棱镜16的腰),光线从垂直于等腰直角三棱镜16侧面的方向射入,即光线与等腰直角三棱镜16的接触点位于转动杆13的轴线延长线上。通过伺服电机可以带动支撑板4正反转动15
°
后停止,当然,也可以不设置伺服电机,而是转动杆13直接转动设置于机架上,在机架上焊接一根定位杆14,在锁止板6上刻有角度线15,人工转动支撑板4后通过定位杆14知晓支撑板4、治具本体1以及等腰直角三棱
镜16的转动角度。
22.具体实施过程如下:
23.将等腰直角三棱镜16的底面与斜面2相贴并借助双面胶粘住等腰直角三棱镜16底面的四个角,由于等腰直角三棱镜16是通过反射实现透光,参照附图2,等腰直角三棱镜16的状态从左至右依次命名为45
°
棱镜、30
°
棱镜、60
°
棱镜;45
°
相当于是等腰直角三棱镜16的0
°
,即光线垂直于等腰直角三棱镜16的侧面入射;30
°
相当于等腰直角三棱镜16的-15
°
;60
°
相当于等腰直角三棱镜16的+15
°
。分别对应关系为:等腰直角三棱镜1645
°
时,探测器接收角度为90
°
;等腰直角三棱镜16转动15
°
(绕a点逆时针转动15
°
)时,即棱镜30
°
时,探测器接收角度为60
°
;等腰直角三棱镜16转动-15
°
(绕a点顺时针转动15
°
)时,即棱镜60
°
时,探测器角度为120
°
。因此在入射的光线位置不变时,能够满足等腰直角三棱镜16三个角度(棱镜45
°
、棱镜30
°
、棱镜60
°
)的测试,而且探测器能完整接收到等腰直角三棱镜16反射出来的光线,从而提高透光测试的准确性。
24.以上所述的仅是本实用新型的实施例,方案中公知的具体结构及特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本实用新型结构的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1