人工智能测试平台的制作方法
1.本实用新型涉及人工智能领域,尤其涉及人工智能测试平台。
背景技术:
2.人工智能是计算机科学的一个分支,它企图了解智能的实质,并生产出一种新的能以人类智能相似的方式做出反应的智能机器,该领域的研究包括机器人、语言识别、图像识别、自然语言处理和专家系统等;人工智能从诞生以来,理论和技术日益成熟,应用领域也不断扩大,可以设想,未来人工智能带来的科技产品。
3.根据中国专利授权公告号cn211826285u提供的“一种人工智能测试平台”,包括输入设备、pc终端和下位机系统,下位机系统包括控制器、硬件接口和执行模块,硬件接口包括数字口、模拟口、串口和i2c口,执行模块包括led灯、蜂鸣器、舵机、滑动变阻器、声音传感器、光敏传感器、音乐播放器和oled显示屏;输入设备与pc终端连接,pc终端和控制器连接,控制器通过数字口分别连接有led灯、蜂鸣器、舵机,控制器通过模拟口分别连接有滑动变阻器、声音传感器、光敏传感器,控制器通过串口连接有音乐播放器,控制器通过i2c口连接有oled显示屏;控制器依据操作指令控制相应的执行模块进行测试,但是存在平台仅为理论模型,没有实体模型,因此,有必要提供人工智能测试平台解决上述技术问题。
技术实现要素:
4.本实用新型提供人工智能测试平台,解决了传统平台仅为理论模型,没有实体模型的技术问题。
5.为解决上述技术问题,本实用新型提供的人工智能测试平台,包括测试平台箱和测试底座,所述测试平台箱底面转动安装有平台移动轮,且测试平台箱外侧一面安装有综合控制屏,所述测试平台箱一侧固定安装有手动推杆,且测试平台箱上端面后侧焊接有后端焊接架,所述测试平台箱顶端安装有底部滑轨,且底部滑轨上端安装有光栅移动架,所述光栅移动架一侧螺钉安装有光栅固定装置,且光栅固定装置上端固定有光栅位置传感器,所述光栅移动架一侧固定安装有侧边校准块,且侧边校准块另一侧与后端焊接架之间留有五毫米距离,所述光栅移动架一侧螺纹安装有端部固定板,所述光栅位置传感器前侧安装有运动物块,且运动物块底面安装于测试底座上端,所述测试平台箱上端面螺钉安装有测试底座,具有测试人工智能算法控制精度的功能,测试数据能够及时传入综合控制屏内进行读取。
6.优选的,所述平台移动轮一侧固定安装有螺纹拆卸底座,所述综合控制屏右侧安装有电机控制按钮,便于测试平台的移动。
7.优选的,所述光栅位置传感器一侧连接有电源线,能够为光栅提供电源。
8.优选的,所述测试平台箱后侧安装有散热风扇,能够实现平台内部散热。
9.优选的,所述端部固定板通过固定螺钉固定在光栅移动架一侧,所述光栅固定装置包括固定块,且固定块上端接触安装有光栅位置传感器,且光栅固定装置一侧通过侧边
螺钉固定在光栅移动架外侧,能够固定光栅传感器。
10.优选的,所述测试底座内侧开设有物块安装槽,且物块安装槽顶面放置有运动物块,能够安装运动物块。
11.优选的,所述测试底座包括底座滑槽,且底座滑槽上端面安装有凸块底板,所述测试底座顶面边缘处安装有底座螺钉,所述凸块底板上端面固定有电控综合滑轨电机,且电控综合滑轨电机一侧开设有usb数据插入口,能够实现运动物块的运动。
12.与相关技术相比较,本实用新型提供的人工智能测试平台具有如下有益效果:
13.1.本实用新型提供人工智能测试平台,通过安装usb数据插入口和电控综合滑轨电机等部件,工作人员将存储有人工智能的程序通过usb数据插入口传入电控综合滑轨电机内,在程序的控制下,当工作人员按下电机控制按钮时,电机电源接通,在滑轨电机的带动下,运动物块在水平方向上进行运动,运动主要依靠底座滑槽以及凸块底板之间的配合,在运动物块前端安装有光栅传感器,光栅传感器一侧通过电源线接通电源,当物块运动过程中,光栅传感器通过莫尔条纹现象进行物体位置的时刻测量,具体为:光栅线之间有很小的夹角,则在近似垂直于栅线的方向上显示比栅距宽得很多的明暗相间的条纹,这些条纹称为莫尔条纹,中间为亮带,上下两条为暗带,当标尺光栅沿垂直于栅线的方向每移动一个栅距时,莫尔条纹近似沿栅线方向移过一个条纹间距,用光电元件接收莫尔条纹信号并经电路处理后,用计数器可得到标尺光栅移过的距离,解决了传统的测试平台测试效果差的问题。
14.2.本实用新型提供人工智能测试平台,通过安装光栅位置传感器和综合控制屏等部件,上述莫尔条纹现象原理中用到的电子元件均集成在光栅位置传感器内,当光栅位置传感器将物体位置数据采集后,通过内置的信号发射器传入综合控制屏内进行实时转录,综合控制屏的型号为液晶控制屏,上述测试过程中,主要是判断人工智能程序在控制电机来实现物块移动过程中的误差大小,程序中的物块预设移动值是需要人为事先设置,程序内容设计不在本方案范围内,通过光栅测试出来的为测试值,通过对比测试值和预设值得出人工智能程序的误差大小,解决了传统的测试平台无法实时观察测试数据的问题。
附图说明
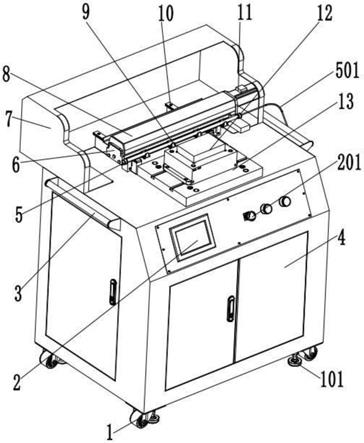
15.图1为本实用新型的结构示意图;
16.图2为本实用新型中测试平台箱的结构局部示意图;
17.图3为本实用新型中光栅固定装置的结构局部示意图;
18.图4为本实用新型中测试底座的结构局部示意图。
19.图中标号:1、平台移动轮;101、螺纹拆卸底座;2、综合控制屏;201、电机控制按钮;3、手动推杆;4、测试平台箱;401、散热风扇;5、光栅位置传感器;501、电源线; 6、端部固定板;601、固定螺钉;7、后端焊接架;8、光栅移动架;9、光栅固定装置; 901、固定块;902、侧边螺钉;10、底部滑轨;11、侧边校准块;12、运动物块;1201、物块安装槽;13、测试底座;1301、底座螺钉;1302、底座滑槽;1303、凸块底板;1304、usb数据插入口;1305、电控综合滑轨电机。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
21.实施例一:
22.请参阅图1-4,本实用新型提供一种技术方案:人工智能测试平台,包括测试平台箱 4和测试底座13,测试平台箱4底面转动安装有平台移动轮1,且测试平台箱4外侧一面安装有综合控制屏2,测试平台箱4一侧固定安装有手动推杆3,且测试平台箱4上端面后侧焊接有后端焊接架7,测试平台箱4顶端安装有底部滑轨10,且底部滑轨10上端安装有光栅移动架8,光栅移动架8一侧螺钉安装有光栅固定装置9,且光栅固定装置9上端固定有光栅位置传感器5,光栅移动架8一侧固定安装有侧边校准块11,且侧边校准块 11另一侧与后端焊接架7之间留有五毫米距离,光栅移动架8一侧螺纹安装有端部固定板 6,光栅位置传感器5前侧安装有运动物块12,且运动物块12底面安装于测试底座13上端,测试平台箱4上端面螺钉安装有测试底座13,具有测试人工智能算法控制精度的功能,测试数据能够及时传入综合控制屏2内进行读取;平台移动轮1一侧固定安装有螺纹拆卸底座101,综合控制屏2右侧安装有电机控制按钮201,便于测试平台的移动。
23.本实施方案中,上述莫尔条纹现象原理中用到的电子元件均集成在光栅位置传感器5 内,采用市面上已有的型号keyence-n11n,当光栅位置传感器5将物体位置数据采集后,通过内置的信号发射器传入综合控制屏2内进行实时转录,综合控制屏2为tft-nf2液晶控制屏,上述测试过程中,主要是判断人工智能程序在控制电机来实现物块移动过程中的误差大小,程序中的物块预设移动值是需要人为事先设置,程序内容设计不在本方案范围内,通过光栅测试出来的为测试值,通过对比测试值和预设值得出人工智能程序的误差大小,解决了传统的测试平台无法实时观察测试数据的问题。
24.实施例二:
25.请参阅图1-4,本实用新型提供一种技术方案:人工智能测试平台,光栅位置传感器 5一侧连接有电源线501,能够为光栅提供电源;测试平台箱4后侧安装有散热风扇401,能够实现平台内部散热;端部固定板6通过固定螺钉601固定在光栅移动架8一侧,光栅固定装置9包括固定块901,且固定块901上端接触安装有光栅位置传感器5,且光栅固定装置9一侧通过侧边螺钉902固定在光栅移动架8外侧,能够固定光栅传感器;测试底座13内侧开设有物块安装槽1201,且物块安装槽1201顶面放置有运动物块12,能够安装运动物块12;测试底座13包括底座滑槽1302,且底座滑槽1302上端面安装有凸块底板1303,测试底座13顶面边缘处安装有底座螺钉1301,凸块底板1303上端面固定有电控综合滑轨电机1305,且电控综合滑轨电机1305一侧开设有usb数据插入口1304,能够实现运动物块12的运动。
26.本实施方案中,工作人员将存储有人工智能的程序通过usb数据插入口1304传入电控综合滑轨电机1305内,在程序的控制下,当工作人员按下电机控制按钮201时,电机电源接通,在电控综合滑轨电机1305的带动下,运动物块12在水平方向上进行运动,运动主要依靠底座滑槽1302以及凸块底板1303之间的配合,在运动物块12前端安装有光栅位置传感器5,光栅位置传感器5一侧通过电源线501接通电源,当物块运动过程中,光栅位置传感器5通过莫尔条纹现象进行物体位置的时刻测量,具体为:光栅线之间有很小的夹角,则在近似垂直于栅线的方向上显示比栅距宽得很多的明暗相间的条纹,这些条纹称为莫尔条纹,中
间为亮带,上下两条为暗带,当标尺光栅沿垂直于栅线的方向每移动一个栅距时,莫尔条纹近似沿栅线方向移过一个条纹间距,用光电元件接收莫尔条纹信号并经电路处理后,用计数器可得到标尺光栅移过的距离,解决了传统的测试平台测试效果差的问题。
27.本实用新型提供的人工智能测试平台的工作原理如下:
28.第一创新点实施步骤:
29.第一步:本装置具有测试人工智能算法控制精度的功能,测试数据能够及时传入综合控制屏2内进行读取,工作人员将存储有人工智能的程序通过usb数据插入口1304传入电控综合滑轨电机1305内;
30.第二步:在程序的控制下,当工作人员按下电机控制按钮201时,电机电源接通,在电控综合滑轨电机1305的带动下,运动物块12在水平方向上进行运动,运动主要依靠底座滑槽1302以及凸块底板1303之间的配合;
31.第三步:在运动物块12前端安装有光栅位置传感器5,光栅位置传感器5一侧通过电源线501接通电源,当物块运动过程中,光栅位置传感器5通过莫尔条纹现象进行物体位置的时刻测量,具体为:光栅线之间有很小的夹角,则在近似垂直于栅线的方向上显示比栅距宽得很多的明暗相间的条纹,这些条纹称为莫尔条纹,中间为亮带,上下两条为暗带,当标尺光栅沿垂直于栅线的方向每移动一个栅距时,莫尔条纹近似沿栅线方向移过一个条纹间距,用光电元件接收莫尔条纹信号并经电路处理后,用计数器可得到标尺光栅移过的距离。
32.第二创新点实施步骤:
33.第一步:上述莫尔条纹现象原理中用到的电子元件均集成在光栅位置传感器5内,采用市面上已有的型号keyence-n11n;
34.第二步:当光栅位置传感器5将物体位置数据采集后,通过内置的信号发射器传入综合控制屏2内进行实时转录,综合控制屏2的型号为tft-nf2液晶控制屏;
35.第三步:上述测试过程中,主要是判断人工智能程序在控制电机来实现物块移动过程中的误差大小,程序中的物块预设移动值是需要人为事先设置,程序内容设计不在本方案范围内,通过光栅测试出来的为测试值,通过对比测试值和预设值得出人工智能程序的误差大小。
36.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1