一种基于自适应滤波的海杂波背景下多目标检测方法与流程
1.本发明属于目标检测技术领域,涉及海杂波背景下的目标检测,特别涉及一种基于自适应滤波的海杂波背景下多目标检测方法。
背景技术:
2.海杂波是雷达波束照射海面时波束覆盖区域产生的回波。由于海浪宏观运动及海面不规则的毛细管状运动,造成海杂波具有较强的“非线性、非平稳和非高斯”等特性,使传统的恒虚警检测器(cfar)不能适用于海杂波背景下的多目标检测。对海杂波特性的研究由来已久,早期工作主要集中在海杂波的统计学模型的研究,典型的海杂波统计学模型有weibull,log-normal和k分布。近年来,对实测海杂波信号的“尖峰”特性的研究表明,pareto分布能更加准确地描述这一特性。这些模型的有效性具有一个重要的前提条件:在雷达相干处理时间内海杂波必须是平稳的随机过程,以确保可以用恒定的模型参数实现cfar目标检测。若雷达探测海面上弱小目标时,需要增加相干处理时间以增强目标回波能量,与此同时海杂波的非平稳特性也显著增强,以至于上述前提条件不再满足。因此,基于统计学模型的目标检测方法仅适用于相干处理时间短的场合,而在高海况条件下已不满足工程的需要,必须寻找不依赖统计学模型和先验知识的海杂波抑制方法,进而解决这一难题。
3.为解决上述问题,已有大量研究成果见诸报道:wu提出了一种基于奇异谱分析的海面小目标的检测方法,chen提出了利用svd-frft滤波的海杂波压制方法,li提出了一种强海杂波中检测动目标状态的自适应探测方法,翟东奇等提出了基于非线性自适应滤波器的海杂波抑制技术,zhang提出了一种基于改进的快速聚类分段的海杂波中弱小目标的检测方法,lang针对高分辨sar图像目标识别问题,提出了一种基于像素聚类的舰船目标检测方法,su提出了基于混沌理论和径向基神经网络及k-means聚类的海杂波预测方法。针对海杂波的非平稳混沌特性,ma提出了一种非平稳混沌时间序列相空间重构方法,在此基础上提出一种基于多尺度有向lyapunov指数的海杂波中弱小目标检测方法。
4.上述方法的共同特点是不再依赖海杂波的统计学模型,有效克服了传统方法存在的不足,但存在计算复杂度较高、部分方法需要大量人为标定的训练数据集,这些问题仍是阻碍其工程应用的障碍。
技术实现要素:
5.为了克服上述现有技术的缺点,本发明的目的在于提供一种基于自适应滤波的海杂波背景下多目标检测方法,以期在不依赖任何目标先验知识的情况下,简单快捷地自动区分海杂波和目标回波。
6.为了实现上述目的,本发明采用的技术方案是:
7.一种基于自适应滤波的海杂波背景下多目标检测方法,包括如下步骤:
8.s1)以雷达扫描整个监测海面的回波为对象,计算每个方位向回波脉冲数量n
p
;
9.s2)按照n
p
将雷达扫描整个监测海面的回波脉冲n等分为n
bin
个方位向单元回波,构成对应各个方位向的回波矩阵xi,xi为n
p
×nt
的矩阵,i=1,2,
…
,n
bin
,n
bin
=floor(n/n
p
),floor(
·
)为取整函数,n
t
为回波脉冲采样点数;
10.s3)计算回波矩阵xi的协方差矩阵c;
11.s4)对协方差矩阵c进行特征值分解,得到特征矩阵v和特征值矢量d,d为对角矩阵,对角线元为协方差矩阵c的特征值,v每一列为各个特征值对应的特征矢量;
12.s5)提取d的对角线元,按降序重排协方差矩阵c的特征值,并相应调整v各列的位置,计算奇异谱σj,j=1,2,
…
,n
p
;
13.s6)利用v对回波矩阵xi自适应滤波;选择一个门限t
hr
,将满足σj≥t
hr
的特征值作为主分量(principal component,pc),将其余特征值作为次分量(minor component,mc),主分量个数记为n
ev
,将滤波后的回波矩阵xi分为s
p
和sm,s
p
为n
ev
×nt
矩阵,sm为nm×nt
矩阵,nm=n
p-n
ev
;
14.s7)若n
ev
≤3,判定回波xi为海杂波;若n
ev
>3,进行下一步,对s
p
和sm做进一步处理(sm可用于弱小目标检测);
15.s8)采用最大似然估计依次估算s
p
或sm各行的pareto分布模型参数(a,b);利用估计的模型参数通过pareto随机数发生器生成与回波信号等长的随机序列y,采用kullback-leibler(k-l)散度识别目标回波脉冲,将k-l散度最大值对应的回波信号识别为目标回波,进而用自适应门限的峰值检测法确定各个目标位置;
16.s9)确定目标距离;
17.s10)重复s2~s9,即可获得整个监测海面上目标的位置。
18.与现有技术相比,本发明可自适应地分离海杂波和目标回波,在给定海杂波背景下,可以有效地消除海杂波并检测到传统方法不能发现的目标,在检测精度上有很明显的提高。同时,本发明采用自适应滤波方法分离海杂波与目标回波,利用k-l散度识别目标回波,在此基础上采用自适应峰值检测法实现多目标的检测与定位,是一种基于信息几何理论的信号处理方法。
附图说明
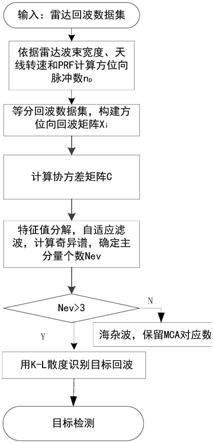
19.图1为本发明流程图。
20.图2为山东烟台养马岛的对海观测雷达接收的海杂波的奇异谱。
21.图3为回波矩阵主分量数量n
ev
柱状图,其中(a)为t1脉冲,(b)为t2脉冲。
22.图4为滤波后的t1脉冲,其中(a)为pc回波,(b)为mc回波。
具体实施方式
23.下面结合附图和实施例详细说明本发明的实施方式。
24.海杂波背景下的多目标检测是对海探测雷达信号处理的难点之一,由于海杂波的非平稳特性,很难用恒定参数的概率统计模型对其建模,因此,传统的恒虚警检测器(cfar)不能适用于海杂波背景下的多目标检测。
25.基于此,本发明提供了一种基于自适应滤波的海杂波背景下多目标检测方法,具体步骤如图1所示,包括:
26.一种基于自适应滤波的海杂波背景下多目标检测方法,包括如下步骤:
27.s1)以雷达扫描整个监测海面的回波为对象,计算每个方位向回波脉冲数量n
p
;
[0028][0029]
其中ωe为对海观测雷达天线转动速度,θa为雷达的波束方位宽度,prf为脉冲重复频率。
[0030]
以雷达回波数据文件之一20200722150408_798_scanning.mat为例,即2020年7月22日15时4分8秒在烟台养马岛的1号实验地采集的第798海面回波数据说明该雷达的主要性能指标。雷达为x波段雷达(fc=9.3~9.5ghz),主波束方位宽度θa=1.2
°
,垂直波束宽度θe=20
°
。天线转速ωe=24r/min。雷达发射脉冲为“方式2”,即1个常规脉冲(t1=40ns)和1个lfm脉冲(t2=3μs),距离向采样频率fs=60mhz,脉冲重复频率prf=1.6khz,依据上述参数,计算雷达在一个方位角所发射的脉冲个数为:n
p
=14。
[0031]
s2)按照n
p
将雷达扫描整个监测海面的回波脉冲n等分为n
bin
个方位向单元回波,构成对应各个方位向的回波矩阵xi,xi为n
p
×nt
的矩阵,i=1,2,
…
,n
bin
,n
bin
=floor(n/n
p
),floor(
·
)为取整函数,n
t
为回波脉冲采样点数;
[0032]
雷达回波数据文件20200722150408_798_scanning.mat包含:1792
×
2224(常规脉冲)和1792
×
8224(lfm脉冲)2个回波数据矩阵,信号带宽相同(25mhz)。矩阵行对应方位向、列对应距离向,常规脉冲起始距离门为77.5m,lfm脉冲的起始距离435m。按照n
p
值将回波等分为:n
bin
=floor(1792/n
p
)=123个方位向单元回波,因此,整个回波数据文件被划分为123个14
×
2224(常规脉冲)和14
×
8224(lfm脉冲)回波矩阵xi。
[0033]
s3)计算各回波矩阵xi的协方差矩阵c;
[0034][0035]
其中,h表示共轭转置。回波矩阵xi中,每一行对应一个回波基带信号的采样值v=x+jy,回波的瞬时相位θ=tan-1
(y/x),所构造的协方差矩阵c保留了回波的瞬时幅相特征和脉冲间的相干特性,经s4)~s6)后,所得到是根据海杂波、目标回波在幅度和相位上的不同而进行的信号正交分离的结果,与仅从回波幅度特征区分杂波与目标的方法相比具有明显优势。
[0036]
s4)对协方差矩阵c进行特征值分解,得到特征矩阵v和特征值矢量d,d为对角矩阵,对角线元为协方差矩阵c的特征值,v每一列为各个特征值对应的特征矢量;
[0037]
s5)提取d的对角线元,按降序重排协方差矩阵c的特征值,并相应调整v各列的位置,计算奇异谱σj,j=1,2,
…
,n
p
;
[0038]
具体地,[v d]=eig(c),式中,dj为重新排序后协方差矩阵c的特征值。
[0039]
如图2所示,为回波数据文件20200722150408_798_scanning.mat常规回波脉冲在雷达波束指向az=64.70
°
时的奇异谱。
[0040]
s6)利用v对回波矩阵xi自适应滤波:
[0041]
xi=v
t
xi[0042]
式中,t表示矩阵转置。
[0043]
选择一个门限t
hr
,将满足σj≥t
hr
的特征值作为主分量(principal component,pc),将其余特征值作为次分量(minor component,mc),主分量个数记为n
ev
,将滤波后的回波矩阵xi分为s
p
和sm,s
p
为n
ev
×nt
矩阵,sm为nm×nt
矩阵,nm=n
p-n
ev
;即,矩阵s
p
的行数等于协方差矩阵c的主分量个数n
ev
,其中包含滤波后的海杂波和大目标回波;矩阵sm的行数等于协方差矩阵c次分量个数(nm=n
p-n
ev
),其中包含滤波后的海杂波和弱小目标回波。
[0044]
确定门限t
hr
:根据对大量海杂波数据的研究表明,海杂波主要由bragg、白冠(whitecap)和突发(burst)散射形成,bragg散射占比为80%以上,白冠散射约占10%~20%,而突发散射的占比在0.01%左右。因此,将门限t
hr
=0.001是本发明通过实验选取主分量的门限。
[0045]
如图3所示,为回波数据文件20200722150408_798_scanning.mat回波脉冲在雷达波束指向az=5.65
°
时的主分量数量n
ev
的柱状图,(a)t1脉冲,(b)t2脉冲。
[0046]
s7)若n
ev
≤3,判定回波xi为海杂波;若n
ev
>3,进行下一步,对s
p
和sm做进一步处理(sm可用于弱小目标检测);
[0047]
将n
ev
≤3作为判定回波xi为海杂波的依据是:海杂波主要由bragg、白冠(whitecap)和突发(burst)散射形成。
[0048]
s8)采用最大似然估计依次估算s
p
或sm各行的pareto分布模型参数(a,b);利用估计的模型参数通过pareto随机数发生器生成与回波信号等长的随机序列y,采用kullback-leibler(k-l)散度识别目标回波脉冲,将k-l散度最大值对应的回波信号识别为目标回波,进而用自适应门限的峰值检测法确定各个目标位置;
[0049]
其中,采用最大似然估计依次估算s
p
或sm各行的pareto分布模型参数(a,b)的方法为:
[0050][0051]
式中,x为回波的瞬时幅度,f
x
(x)表示pareto概率密度分布函数。
[0052]
采用kullback-leibler(k-l)散度识别目标回波脉冲,方法为:
[0053][0054]
式中,d(p
x
,qy)表示k-l散度,p
x
为回波信号幅度的概率密度函数,qy为随机序列y的pareto分布函数。
[0055]
s9)确定目标距离;
[0056]
示例地,可采用matlab的findpeaks函数确定目标距离,表达式为:
[0057]
[pks,locs,w,p]=findpeaks(sx(i,:),
′
minpeakprominence
′
,minp)
[0058]
式中,x=p或m,即sx(i,:)中的i为回波矩阵s
p
或回波矩阵sm被识别为目标回波所在的行号,输入选项
′
minpeakprominence
′
,minp为最小峰值显著性;函数的输出pks,locs,w,p分别是被确认有效的谱峰的高度、位置、宽度和显著性。
[0059]
其中,最小峰值显著性的估计方法是,首先用没有最小峰值显著性约束的
findpeaks测量回波信号的全部峰值显著性p,计算p的均值μ和标准离差σ,令
[0060]
minp=μ+nσ,n∈[1,3]
[0061]
即可得到目标检测的自适应门限,其中n为1~3之间的任意实数。
[0062]
s10)重复s2~s9,即可获得整个监测海面上目标的位置。
[0063]
在s6)~s7)中,选择门限t
hr
和确定区分海杂波与目标回波的原则是所提方法的核心问题,如前所述,海杂波主要由bragg、白冠(whitecap)和突发(burst)散射形成,其中,bragg散射为入射电波在海面产生的谐振现象,能够在海表面毛细管状波和海浪重力波这两个不同的波长尺度上都会发生。在一定的海况下,波浪会按其运动周期发生后向散射,来自多个海面波的回波就会进行相干叠加形成雷达接收的回波,是海杂波的主要成分。白冠由波浪上端变窄下端变宽后形成类似劈状的结构而产生的散射。但并不是每个劈结构都能形成白冠散射,仅当劈状结构破碎后才形成白冠,因此白冠在海杂波中所占比例较低。突发散射由即将破碎波浪面产生的后向散射,波面在破碎前形状呈陡峭的平面状,由此产生较强的镜面反射。突发散射在hh极化下具有很强的功率;但在vv极化下,海面动态结构形成的多径效应使得突发散射变得极其微弱,有时候甚至可以忽略(如图2所示,为在烟台养马岛实验场实测海杂波的奇异谱)。
[0064]
在确定回波中包含目标之后,从自适应滤波后的回波中识别目标回波是所提方法创新点,传统方法主要是在欧氏空间通过计算幅度之间的差异区分海杂波与目标回波,常存在较高的虚警和漏报概率。从信息几何的方法观察处理这一问题与传统方法有明显的不同与优势,海杂波与目标回波被视为黎曼空间中随机流形上的点集,利用k-l散度可正确地估算随机流形上点之间的差异,具有稳定可靠的识别率。
[0065]
在s9)中,采用回波信号中最小峰值显著性minp作为检测目标的门限,峰值显著性p=pks/w,即峰值高度与宽度之比,这一门限综合考查峰值高度和宽度,并根据回波的动态特性自适应地调整门限,在确保对目标的可靠检测的同时有效降低目标检测的虚警概率。
[0066]
如表1、2所示,为从回波数据文件20200722150408_798_scanning.mat的t1、t2脉冲回波检测的多目标。
[0067]
表1 t1脉冲主分量回波目标检测结果
[0068]
方位角(
°
)近程杂波峰值位置(km)目标位置(km)295.140.172,0.342,0.432,0.677,1.277,1.386,1.964.849,10.7755.650.192,0.342,0.487,0.6026.7363.420.147,0.282,0.392,0.467,0.512,0.552,0.7777.464.700.127,0.287,0.487,0.612,0.717,0.782无
[0069]
表2 t2脉冲主分量回波部分目标检测结果
[0070][0071][0072]
表1、2仅给出回波矩阵主分量对应的目标检测结果,其中方位角为回波矩阵对应方位角的均值。表1为t1脉冲回波全部的目标检测结果,观察滤波后的回波可见,t1回波存在较强的近程杂波(见图4中(a)和(b)所示),为此,将距离小于2km的目标判断为近程杂波。
[0073]
由于t2脉冲功率远大于t1脉冲功率,所检测到的目标数量远多于表1中的目标数量,为比较起见,表2仅列出了与表1目标相近的方位向目标检测结果。图4为雷达波束方位角为5.65
°
时的pc、mc回波,经k-l散度计算,图4中(a)的第1行被判定为目标回波,目标检测结果见表1,除近程杂波外,仅探测到6.73km处的目标;对比表2的目标检测结果可见,除6.365km的目标外,从11.252~13.886km存在连续12个峰值点,对照“x波段雷达对海探测实验与数据获取年度进展”(刘宁波,丁昊,黄勇等,雷达学报,2021,10(1):173-182.doi:10.12000/jr21011)给出的目标场景,该方位向存在一座航道浮标与浮标相距一段距离的芝罘岛,因为t1脉冲功率小,该岛屿为弱目标,不能在pc回波中检测,但在mc回波中,该岛屿回波清晰可见。
[0074]
由上述实验结果可见,本发明所提方法能够准确区分海杂波与目标回波,具有探测海面弱小目标的能力。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1