太阳Hα空间望远镜波长定标装置及方法
太阳h
α
空间望远镜波长定标装置及方法
技术领域
1.本发明属于空间光学领域,具体涉及太阳hα空间望远镜的波长定标装置及方法。
背景技术:
2.太阳与人类生活密切相关,太阳自身的活动会对地球造成直接影响,因此科学家密切观测太阳活动。在地面观测时受大气因素、气象等因素影响,导致测试数据不够准确,为此研制星载的太阳hα空间望远镜,在空间环境下观测太阳,有效避免地面大气和阴雨天气对测试的影响。太阳hα空间望远镜由全日面成像子系统和hα光谱成像子系统组成,二者共用前置光学系统。其中hα谱段主要特点:光谱范围窄光谱分辨率(半峰值带宽)甚高(小于),在每个谱线位置的光谱辐射照度高。传统的基于单色仪的光谱波长定标方法,由于其输出单色光的线宽(半峰值带宽)一般不小于且单色波长光的能量较弱,根本无法满足太阳ha空间望远镜的波长定标要求。
技术实现要素:
3.为了解决现有技术中存在的问题,本发明提供了一种太阳hα空间望远镜的波长定标装置及方法,有效克服了传统的基于单色仪光谱波长定标,光谱分辨率低和单色能量弱的缺点。
4.本发明解决技术问题所采用的技术方案如下:
5.太阳hα空间望远镜的波长定标装置,该装置包括:波长可调激光器、波长计、积分球、平行光管和太阳空间望远镜;所述波长可调激光器经过所述波长计调节光谱线宽后,将光谱小于0.1pm的单色激光发送至所述积分球内,所述单色激光在所述积分球内经过多次漫反射后,出射经过所述平行光管焦面后进入所述平行光管内;经过所述平行光管扩束后,入射到太阳空间望远镜内,获得对应波长的图像。
6.优选的,还包括设置在所述波长可调激光器下方,调节所述波长可调激光器出射方向的旋转台。
7.优选的,还包括设置在所述太阳空间望远镜下,使所述太阳空间望远镜获得同一波长激光在全视场内的图像的高精度三维转台。
8.优选的,所述波长计的波长测试精度小于0.04pm。
9.优选的,所述波长可调激光器线宽小于0.1pm,功率20mw,在光谱范围内652nm~658nm连续可调。
10.太阳hα空间望远镜的波长定标装置的定标方法,所述方法包括如下步骤:
11.步骤一:将所述波长可调激光器安装在所述旋转台上;调整所述旋转台,将所述波长可调激光器的出光口对准所述波长计;
12.步骤二:利用所述波长计测试所述波长可调激光器输出的激光波长,直至波长稳定后,利用所述旋转台将所述波长可调激光器的出光口对准所述积分球;
13.步骤三:所述波长可调激光器发射光谱小于0.1pm的单色激光进入所述积分球内,
所述单色激光在所述积分球内经过多次漫反射后,出射均匀的激光经过所述平行光管焦面后进入所述平行光管内;经过所述平行光管扩束后,入射到太阳空间望远镜内;
14.步骤四:设置在所述太阳空间望远镜下的高精度三维转台,使所述太阳空间望远镜转动,从而获得同一波长激光在全视场内的图像;
15.步骤五:改变波长可调激光器的波长,获得每个激光波长的全视场图像;通过对所述图像数据处理,获得所述单色激光的波长与每列像元序号之间的函数关系,完成波长定标。
16.优选的,所述数据处理包括如下步骤:
17.步骤一:利用质心算法计算每列像元对应各个波长的质心像元行序号:
[0018][0019]
式中:uk为波长λk位置在第j列像元的质心对应的行序号;g(i,j)为第i行第j列的像元灰度值;i为波长λk位置在第j列像元的行序号;
[0020]
步骤二:依次获得对应波长λ1 λ2 λ3
ꢀ……ꢀ
λn的像元质心行序号u1 u2 u3
……ꢀ
un,利用最小二乘法,获得波长与像元序号的函数关系:
[0021]
λk=aj+bj×i[0022]
式中:λk为波长,aj为第j列像元线性拟合截距,bj为j列像元线性拟合系数,i为第j列像元的行序号。
[0023]
优选的,所述波长计的波长测试精度小于0.04pm。
[0024]
优选的,所述波长可调激光器线宽小于0.1pm,功率20mw,在光谱范围内652nm~658nm连续可调。
[0025]
本发明的有益效果是:本发明采用具有高单色性、高能量、超窄线宽性能的波长可调激光器,平行光管,波长计,高精度二维转台等组成的高精度波长定标装置,满足具有甚高光谱分辨率的光谱成像系统的波长定标要求,在太阳hα空间望远镜研制、装调、检测等过程中广泛应用,在未来具有甚高光谱分辨率的光谱成像系统的波长定标中具有同等重要的应用价值,具有广泛的工程应用前景。
附图说明
[0026]
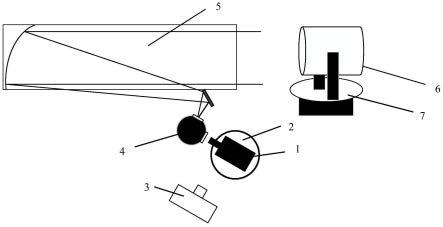
图1本发明太阳hα空间望远镜的波长定标装置结构示意图。
[0027]
图中:1、波长可调激光器,2、旋转台,3、波长计,4、积分球,5、平行光管,6、太阳空间望远镜,7、高精度三维转台。
具体实施方式
[0028]
下面结合附图和实施例对本发明做进一步详细说明。
[0029]
如图1所示,太阳hα空间望远镜的波长定标装置,该装置包括:波长可调激光器1、旋转台2、波长计3、积分球4、平行光管5、太阳空间望远镜6和高精度三维转台7;所述波长可调激光器1下方设置旋转台2,所述波长可调激光器1先对准波长计3,测试波长可调激光器1
输出的激光波长,直至波长稳定后,利用旋转台2将波长可调激光器旋转90
°
,使出光口对准所述积分球4。将光谱线宽小于0.1pm的单色激光入射至所述积分球4内,所述单色激光在所述积分球4内经过多次漫反射后,出射均匀光经过所述平行光管5焦面进入所述平行光管5内;经过所述平行光管5扩束后,入射到太阳空间望远镜6内,获得对应波长的图像。由于每次成像激光光斑只能成像于狭缝方向的局部视场内,太阳空间望远镜6放置到高精度三维转台7上,利用水平旋转,获得同一波长激光在全视场内的图像。改变波长可调激光器1的波长,获得每个激光波长的全视场图像,然后通过数据处理,获得波长与每列像元序号之间的函数关系,完成波长定标。
[0030]
其中,所述波长计3的波长测试精度小于0.04pm;所述波长可调激光器1线宽小于0.1pm,功率20mw,在光谱范围内652nm~658nm连续可调。在本实施例中,波长可调激光器1出光口与积分球4的入光口等高同心,波长可调激光器1发出的激光全部入射到积分球4内,积分球4的直径φ100mm,入光口φ20mm,出光口φ20mm。积分球4的出光口与平行光管5焦面位置重合且等高同心。所述高精度三维转台7具有高低,俯仰旋转,水平旋转三维调整调整功能。调整高精度三维转台7的高低,使得太阳hα空间望远镜6与平行光管5出光口等高,调整俯仰角使激光光斑成像于视场内,在像面上形成激光光斑图像。太阳hα空间望远镜6的狭缝较长,每次测试激光光斑只占据部分视场,通过高精度三维转台7的水平旋转台,按固定的角度间隔,旋转角度,依次获得狭缝方向各个视场的图像(相邻视场有20%的重叠),进而获得该波长对应狭缝方向的全视场图像。依次调整波长可调激光器1输出激光的波长,波长间隔按上述过程获得对应多个激光波长的图像。
[0031]
基于太阳hα空间望远镜的波长定标装置的定标方法,所述方法包括如下步骤:
[0032]
步骤一:将所述波长可调激光器1安装在所述旋转台2上;调整所述旋转台2,将所述波长可调激光器1的出光口对准所述波长计3;
[0033]
步骤二:利用所述波长计3测试所述波长可调激光器1输出的激光波长,直至波长稳定后,利用所述旋转台2将所述波长可调激光器1旋转90
°
,使所述波长可调激光器1的出光口对准所述积分球;
[0034]
步骤三:所述波长可调激光器1发射光谱小于0.1pm的单色激光进入所述积分球4内,所述单色激光在所述积分球4内经过多次漫反射后,出射均匀光经过所述平行光管5焦面进入所述平行光管5内;经过所述平行光管5扩束后,入射到太阳空间望远镜6内;
[0035]
步骤四:设置在所述太阳空间望远镜6下的高精度三维转台7,使所述太阳空间望远镜6转动,从而获得同一波长激光在全视场内的图像;
[0036]
步骤五:通过对所述图像进行数据处理,获得所述单色激光的波长与每列像元序号之间的函数关系,完成波长定标。
[0037]
其中,所述数据处理包括如下步骤:
[0038]
步骤一:利用质心算法计算每列像元对应各个波长的质心像元行序号:
[0039][0040]
式中:uk为波长λk位置在第j列像元的质心对应的行序号;g(i,j)为第i行第j列的
像元灰度值;i为波长λk位置在第j列像元的行序号;
[0041]
步骤二:依次获得对应波长λ1 λ2 λ3
ꢀ……ꢀ
λn的像元质心行序号u1 u2 u3
ꢀ……ꢀ
un,利用最小二乘法,获得波长与像元序号的函数关系
[0042]
λk=aj+bj×i[0043]
式中:λk为波长,aj为第j列像元线性拟合截距,bj为j列像元线性拟合系数,i为第j列像元的行序号。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1