一种无人直升机及地面控制系统的制作方法
[0001]
本申请属于无人机技术领域,特别涉及一种无人直升机及地面控制系统。
背景技术:
[0002]
无人驾驶直升机,是指由无线电地面遥控飞行和/或自主控制飞行的可垂直起降(vtol)不载人飞行器,在构造形式上属于旋翼飞行器,在功能上属于垂直起降飞行器。近十几年来,随着复合材料、动力系统、传感器、尤其是飞行控制等技术的研究进展,无人直升机得到了迅速的发展,在越来越多的领域得到应。
[0003]
无人驾驶直升机大多采用相适配的地面控制设备在地面进行无线操控,但是,随着使用环境的越来越苛刻,例如在救援、灭火等运用场景,环境中往往伴随大风、浓烟等干涉因素,因此对地面控制设备与无人驾驶直升机之间是无线通讯安全性的要求越来越高,目前的地面控制设备或无人驾驶直升机上仅仅设置一套相适配的通讯设备,一旦出现故障,将导致无人驾驶直升机失去控制,造成不必要的损失。
技术实现要素:
[0004]
为了解决上述技术问题至少之一,本申请提供了一种无人直升机及地面控制系统。
[0005]
第一方面,本申请公开了一种无人直升机,所述无人直升机包括:
[0006]
第一机载无线通讯模块,所述第一机载无线通信模块用于与地面控制系统进行无线通讯;
[0007]
第一机载控制器,所述第一机载控制器用于通过所述第一机载无线通讯模块接收的地面控制系统发送的控制信息,并根据所述控制信息对无人直升机进行控制;
[0008]
第二机载无线通讯模块,所述第二机载无线通讯模块用于与地面控制系统进行无线通讯;
[0009]
第二机载控制器,所述第二机载控制器用于通过所述第二机载无线通讯模块接收的地面控制系统发送的控制信息,并根据所述控制信息对无人直升机进行控制,其中
[0010]
所述第一机载控制器与所述第二机载控制器通过数据总线连接,且相互备份,所述第二机载控制器储存所有所述第一机载控制器的信息。
[0011]
根据本申请的至少一个实施方式,所述第一机载控制器和所述第二机载控制器均与所述无人直升机的飞行姿态控制电机连接。
[0012]
根据本申请的至少一个实施方式,所述的无人直升机还包括:
[0013]
机载云台,所述机载云台设置在所述无人直升机底部,其中,所述第一机载控制器用于根据所述第一机载无线通讯模块接收的地面控制系统发送的云台控制信息,对所述机载云台进行控制;或
[0014]
所述第二机载控制器用于根据所述第二机载无线通讯模块接收的地面控制系统发送的云台控制信息,对所述机载云台进行控制。
[0015]
根据本申请的至少一个实施方式,所述的无人直升机还包括:
[0016]
电池模块,所述电池模块用于为所述无人直升机内部设备供电。
[0017]
第二方面,本申请公开了一种无人直升机地面控制系统,用于控制如上述任一项所述的无人直升机,所述无人直升机地面控制系统包括:
[0018]
第一地面无线通讯模块,所述第一地面无线通信模块用于与所述无人直升机进行无线通讯;
[0019]
第一地面处理器,所述第一地面处理器用于通过所述第一地面无线通讯模块向所述无人直升机发送的控制信息;
[0020]
第二地面无线通讯模块,所述第二地面无线通讯模块用于与所述无人直升机进行无线通讯;
[0021]
第二地面处理器,所述第二地面处理器用于通过所述第二地面无线通讯模块向所述无人直升机发送的控制信息,其中
[0022]
所述第一地面处理器与所述第二地面处理器通过数据总线连接,且相互备份,所述第二地面处理器储存所有所述第一地面处理器的信息;
[0023]
地面控制器,所述地面控制器用于向所述第一地面处理器或所述第二地面处理器发送控制指令。
[0024]
根据本申请的至少一个实施方式,所述的无人直升机地面控制系统还包括:
[0025]
显示器,所述显示器用于对所述第一地面处理器或所述第二地面处理器接收的无人机直升机发送的反馈信息进行显示。
[0026]
根据本申请的至少一个实施方式,所述地面控制器包括鼠标和键盘,所述键盘上至少设置有无人直升机启动键、无人直升机降落键、无人直升机悬停键、无人直升机机载设备控制键。
[0027]
本申请至少存在以下有益技术效果:
[0028]
本申请的无人直升机及地面控制系统中,无论是无人直升机还是地面控制系统,其包括的处理数据模块均为冗余双备份结构,使得无人直升机的控制更加安全可靠。
附图说明
[0029]
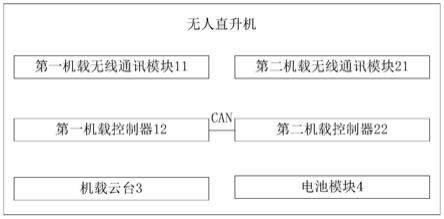
图1是本申请无人直升机的结构示意图;
[0030]
图2是本申请无人直升机地面控制系统的结构示意图。
具体实施方式
[0031]
为使本申请实施的目的、技术方案和优点更加清楚,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。所描述的实施例是本申请一部分实施例,而不是全部的实施例。下面通过参考附图描述的实施例是示例性的,旨在用于解释本申请,而不能理解为对本申请的限制。基于本申请中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。下面结合附图对本申请的实施例进行详细说明。
[0032]
在本申请的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、
“
左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请保护范围的限制。
[0033]
下面结合附图1和图2对本申请的无人直升机及地面控制系统进一步详细说明。
[0034]
第一方面,本申请公开了一种无人直升机;其中,无人直升机可以包括驱动电机、无线通讯模块以及控制器等结构。
[0035]
具体地,无人直升机的无线通讯模块可以包括第一机载无线通讯模块11以及第二机载无线通讯模块21,第一机载无线通信模块11和第二机载无线通讯模块21均用于与地面控制系统进行无线通讯;
[0036]
进一步地,无人直升机的控制器可以包括第一机载控制器12和第二机载控制器22;其中,第一机载控制器12用于通过第一机载无线通讯模块11接收的地面控制系统发送的控制信息,并根据控制信息对无人直升机进行控制;对应地,第二机载控制器22用于通过第二机载无线通讯模块21接收的地面控制系统发送的控制信息,并根据控制信息对无人直升机进行控制;另外,第一机载控制器12与第二机载控制器22通过数据总线(can总线)连接,且相互备份,第二机载控制器22储存所有第一机载控制器12的信息。
[0037]
进一步地,本申请的无人直升机中,第一机载控制器12和第二机载控制器22均与无人直升机的飞行姿态控制电机连接,从而控制无人直升机的飞行姿态。
[0038]
进一步地,本申请的无人直升机还可以包括机载云台3以及电池模块4。
[0039]
机载云台3设置在无人直升机底部,用于设置摄像机或其他设备;其中,第一机载控制器12用于根据第一机载无线通讯模块11接收的地面控制系统发送的云台控制信息,对机载云台3进行控制,例如旋转、抛投等;或者,当第一机载控制器12出现故障时,第二机载控制器22用于根据第二机载无线通讯模块21接收的地面控制系统发送的云台控制信息,对机载云台3进行控制。
[0040]
其中,电池模块4用于为无人直升机内部设备供电,例如飞行姿态控制电机以及上述的各种无线通讯模块、控制器等设备。
[0041]
综上所述,本申请的无人直升机中,包括的处理数据模块均为冗余双备份结构,使得无人直升机的控制更加安全可靠。
[0042]
第二方面,本申请还公开了一种无人直升机地面控制系统,用于控制上述任一项无人直升机;其中,无人直升机地面控制系统可以包括无线通讯模块、处理器、地面控制器等设备。
[0043]
具体地,地面的无线通讯模块可以包括第一地面无线通讯模块51以及第二地面无线通讯模块61,第一地面无线通信模块51和第二地面无线通讯模块61均用于与无人直升机进行无线通讯。
[0044]
地面的处理器可以包括第一地面处理器52和第二地面处理器62;其中,第一地面处理器52用于通过第一地面无线通讯模块51向无人直升机发送的控制信息;第二地面处理器62用于通过第二地面无线通讯模块61向无人直升机发送的控制信息;另外,第一地面处理器52与第二地面处理器62通过数据总线(can总线)连接,且相互备份,第二地面处理器62储存所有第一地面处理器52的信息。
[0045]
进一步地,地面控制器7用于向第一地面处理器52或第二地面处理器62发送控制指令。具体地,优选地面控制器7包括鼠标和键盘,键盘上至少设置有无人直升机启动键、无人直升机降落键、无人直升机悬停键、无人直升机机载设备控制键。
[0046]
进一步地,本申请的无人直升机地面控制系统中还可以包括显示器,用于对第一地面处理器52或第二地面处理器62接收的无人机直升机发送的反馈信息进行显示。
[0047]
综上所述,本申请的无人直升机地面控制系统中,其包括的处理数据模块均为冗余双备份结构,使得对无人直升机的控制更加安全可靠。
[0048]
以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1