控制装置、控制方法以及计算机程序与流程
[0001]
本发明的实施方式涉及控制装置、控制方法以及计算机程序。
背景技术:
[0002]
近年来,作为成套设备控制的方法,被称为极值控制的技术备受瞩目。极值控制是不使用对成套设备进行模拟的复杂的模型就能够实时地搜索操作量的最优值的控制技术。极值控制的概要是,基于通过使对成为控制对象的过程(以下,称为“控制对象过程”)提供的操作量强制地变化而产生的控制对象过程的控制量,搜索基于控制量的评价量成为最优值的操作量。在将这样的极值控制应用于成套设备控制的情况下,需要对极值控制所涉及的各种参数(以下,称为“控制参数”)进行设定。以往,提出了几种用于根据控制对象过程的特性来适当地设定控制参数的指针。但是,若对存在多个评价函数值局部最小或最大的点(极值)的系统应用采用了基于以往的指针的控制参数的设定方法的极值控制,则有时难以适当地搜索在该系统整体中评价函数值成为最小或最大的点(最优值)的操作量的情况。
[0003]
现有技术文献
[0004]
专利文献
[0005]
专利文献1:日本特开2017-224176号公报
[0006]
专利文献2:日本特开平9-274506号公报
[0007]
专利文献3:日本特开2012-141862号公报
技术实现要素:
[0008]
发明所要解决的技术问题
[0009]
本发明所要解决的技术问题在于,提供一种能够根据控制对象的变化来设定适当的操作量的控制装置、控制方法以及计算机程序。
[0010]
用于解决技术问题的手段
[0011]
实施方式的控制装置,具有偏置发生部和极值控制部。偏置发生部对摄动信号的振幅附加偏置。极值控制部将被附加了偏置的所述摄动信号施加于对控制对象过程提供的操作量,将所述操作量提供给规定的评价函数,由此取得评价函数值,基于所述评价函数值来搜索对所述控制对象过程提供的所述操作量的最优值,该评价函数值表示与所述控制对象过程的最优化有关的指标。
附图说明
[0012]
图1是表示实施方式的极值控制的动作例的框线图。
[0013]
图2是表示实施方式的对具有多个极值的评价函数应用极值控制的位置具体例的图。
[0014]
图3是实施方式的对第一高频振动信号附加偏置的框线图。
[0015]
图4a是表示实施方式的第一高频振动信号的时序变化的第一具体例的图。
[0016]
图4b是表示实施方式的操作量的时序变化的第一具体例的图。
[0017]
图4c是表示实施方式的评价函数值的时序变化的第一具体例的图。
[0018]
图5是实施方式的对第一高频振动信号设定振幅的框线图。
[0019]
图6a是表示实施方式的第一高频振动信号的振幅的时序变化的第二具体例的图。
[0020]
图6b是表示实施方式的操作量的时序变化的第二具体例的图。
[0021]
图6c是表示实施方式的评价函数值的时序变化的第二具体例的图。
[0022]
图7是表示实施方式的应用对象的水处理成套设备的概略的图。
[0023]
图8是表示第一实施方式的控制装置的功能结构的具体例的功能框图。
[0024]
图9是表示第一实施方式的基于控制装置的极值控制的一个具体例的图。
[0025]
图10a是表示利用以往的方法进行了极值控制的情况下的操作量以及评价函数值的随时间变化的一个具体例的图。
[0026]
图10b是表示通过第一实施方式的控制装置进行了极值控制的情况下的操作量以及评价函数值的随时间变化的一个具体例的图。
[0027]
图11是表示第二实施方式的控制装置的功能结构的第一具体例的功能框图。
[0028]
图12是表示第二实施方式的控制装置的功能结构的第二具体例的功能框图。
[0029]
图13是表示第二实施方式的极值控制中的操作量以及评价函数值的随时间变化的一个具体例的图。
[0030]
图14是表示第三实施方式的控制装置的功能结构的具体例的功能框图。
具体实施方式
[0031]
以下,参照附图对实施方式的控制装置、控制方法以及计算机程序进行说明。
[0032]
(第一实施方式)
[0033]
[概略]
[0034]
极值控制是基于控制对象过程的操作量和与操作量的变化对应的评价函数值的变化,自适应地搜索评价函数的最优值的控制方法。评价函数值基于控制对象过程的操作量来决定。评价函数值是表示与控制对象过程的最优化有关的指标的值。评价函数值与操作量的关系由规定的评价函数表示。评价函数只要是基于操作量的评价函数即可,可以基于任意的评价基准来设定。另外,评价函数值也可以是操作量本身。通常,在极值控制中的控制对象过程中,该评价函数是相对于操作量而言未知的函数。
[0035]
通常,在极值控制中,通过使高频振动信号发挥作用来强制性地使操作量振动,观测根据操作量而变化的评价函数值。然后,使操作量向评价函数值接近评价函数的最优值的方向变化。通过反复进行这样的操作量的增减,来使评价函数值接近评价函数的最优值的方法是基于极值控制的过程控制的概念。另外,作用于操作量的高频振动信号大多由正弦波提供。
[0036]
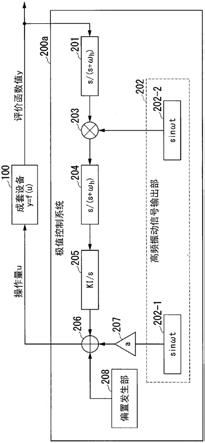
图1是表示实施方式的极值控制的动作例的框线图。图1示出了作为控制对象的过程的成套设备100和实现成套设备100的极值控制的极值控制系统200。极值控制系统200通过反复进行大致以下那样的处理的流程来实现成套设备100的极值控制。
[0037]
从极值控制系统200输出的操作量u被输入至成套设备100(步骤s101)。以下,为了简单,将在步骤s101中输入的操作量u记载为第一操作量。成套设备100输出评价函数值y作
为针对第一操作量的响应(步骤s102)。以下,为了简单,将在步骤s102中被输入的评价函数值y记载为第一评价函数值。评价函数值y被输入至极值控制系统200。
[0038]
极值控制系统200基于第一评价函数值,决定使评价函数值更接近最优的值的第二操作量。极值控制系统200将基于第一评价量决定的第二操作量作为新的操作量输出至成套设备100(步骤s103)。成套设备100输出第二评价函数值作为针对第二操作量的响应(步骤s104)。
[0039]
通过这样的处理的流程,第二评价函数值成为比第一评价函数值更接近最优值的值。在极值控制中,反复执行这样的基于操作量的评价函数值的计算和基于评价函数值的新的操作量的决定,由此控制成套设备100的操作量,以使评价函数值收敛于最优值。
[0040]
此外,基于第一评价函数值决定第二操作量的功能通过极值控制系统200的以下那样的结构来实现。极值控制系统200具备高通滤波器201(hpf:high-pass filter)、高频振动信号输出部202、乘法器203、低通滤波器204(lpf:low-pass filter)、积分器205、加法器206以及振幅设定部207。在图1中,s表示拉普拉斯算子,ω表示高频振动信号的角频率,a表示高频振动信号的振幅,k表示积分器205的积分系数。
[0041]
高通滤波器201输入被反馈的评价函数值的信号,从评价函数值的信号去除与其极小值对应的一定值的偏置。高通滤波器201将被去除了偏置的评价函数值的信号输出至乘法器203。
[0042]
高频振动信号输出部202对乘法器203和加法器206输出高频振动信号。高频振动信号输出部202具备:高频振动信号输出部202-1,对加法器206输出由sinωt表示的第一高频振动信号;以及高频振动信号输出部202-2,对乘法器203输出由sinωt(t是表示时间的变量)表示的第二高频振动信号。第一高频振动信号相当于对操作量施加的摄动信号。第一高频振动信号通过振幅设定部207被乘以a作为振幅值后,被输出至加法器206。第二高频振动信号起到从评价函数值提取高频振动信号的成分的作用。另外,sinωt(正弦波)是高频振动信号的一例,高频振动信号只要是周期性的信号即可,可以具有任意的形状。
[0043]
乘法器203对从高通滤波器201输出的被去除了偏置的评价函数值的信号乘以第二高频振动信号。乘法器203将乘以第二高频振动信号后的评价函数值的信号输出至低通滤波器204。
[0044]
低通滤波器204从乘以高频振动信号后的评价函数值的信号中提取低频成分。低通滤波器204将对评价函数值的信号的低频成分进行表示的信号输出至积分器205。该评价函数值的信号的低频成分被认为表示根据高频振动信号的振动而变化的评价函数值的信号的频率成分。因此,能够根据评价函数值的信号的低频成分,来判断评价函数值相对于操作量的变化而言是增加还是减少。
[0045]
积分器205作为推定器发挥功能,该推定器基于从低通滤波器204输出的评价函数值的信号的低频分量,推定为了使评价函数值接近最优值而应该移动的操作量的方向。具体而言,积分器205对评价函数值的信号的低频成分进行积分,输出低频成分的积分信号。在此输出的积分信号提供相对于当前的操作量而言应该移动的方向(增加方向或减少方向)。
[0046]
加法器206基于当前的操作量信号和从积分器205输出的积分信号,对生成接下来成套设备100应该输入的操作量信号。加法器206对生成的操作量信号加上用于使操作量信
号振动的第一高频振动信号(a
×
sinωt)并输出至成套设备100。
[0047]
在极值控制系统200所具备的功能中,起到对操作量提供振动的作用的第一高频振动信号,是对评价函数的最优值搜索性能带来影响的功能。特别是在评价函数为特殊的情况下,有可能无法发挥充分的最优值搜索性能。通常,第一高频振动信号使用正弦波。作为第一高频振动信号的参数的振幅a也可以在操作量的范围内(例如,基于成套设备100的运转条件等的制约范围内)设定。
[0048]
图2是表示实施方式的对具有多个极值的评价函数应用极值控制的位置具体例的图。极值控制系统200在以从操作量的初始值u
α
逐渐增大操作量的方式进行搜索时,有时会收敛于第一极值。另外,极值控制系统200在以从操作量初始值u
β
逐渐减小操作量的方式进行搜索时,有时会收敛于第二极值。即,设想在极值控制系统200中,即使在利用所设定的高频振动信号来使操作量振动的情况下,也存在无法捕捉评价函数值在比第一极值降低的第二极值附近的评价函数值的变化的情况。
[0049]
为了解决这样的技术问题,实施方式的控制装置具备以下所示的两个功能。一个是对第一高频振动信号附加成为偏置的信号的功能。另一个是使第一高频振动信号的振幅a随时间而变化的功能。通过具备这样的功能,实施方式的控制装置能够将操作量保持为适当的值。
[0050]
[第一功能的详细情况]
[0051]
图3是实施方式的对第一高频振动信号附加偏置的框线图。图3中的极值控制系统200a在还具备偏置发生部208这一点上与极值控制系统200不同,除此以外的结构相同。以下,对与极值控制系统200的不同点进行说明。
[0052]
偏置发生部208对第一高频振动信号的振幅附加正负的偏置。例如,偏置发生部208可以通过将rect函数等矩形波信号输出至加法器206来对第一高频振动信号附加偏置。另外,偏置的大小可以设定为遵守操作量的制约条件。制约条件也可以由用户预先指定。用户例如可以是成套设备100的运用者,也可以是任意的人。偏置发生部208也可以以在由于偏置到达制约条件的极限值等理由而无法进行极值的搜索的情况下、停止向第一高频信号的偏置的附加的方式进行驱动。偏置发生部208也可以任意地变更附加偏置的方法。偏置发生部208也可以接受成套设备的制约条件。例如,偏置发生部208也可以以附加正或负的一个方向的偏置的方式接受制约条件。偏置发生部208既可以使用任意的波形而不限于矩形波来作为附加的偏置信号,也可以使用不是非周期性的不规则的信号。偏置发生部208在根据成套设备的特性而将突发的操作量的变化反映到成套设备中需要时间的情况下,也可以与捕捉变化的时间同步。
[0053]
对将极值控制系统200a应用于图2的评价函数而从初始操作量u
α
开始搜索的情况进行说明。图4a是表示实施方式的第一高频振动信号的时序变化的第一具体例的图。图4b是表示实施方式的操作量的时序变化的第一具体例的图。图4c是表示实施方式的评价函数值的时序变化的第一具体例的图。
[0054]
如图4b所示,在刚开始后,操作量以一定的比例接近第一极值的操作量u1。之后,操作量达到u1而稳定化。这是由于在搜索从操作量u
α
开始时,使操作量向与开始时间点的评价函数值相比评价函数值进一步降低的方向变化的极值控制技术的作用而产生的动作。但是,在操作量暂时达到u1的情况下,该部分是局部观察到的“最优点”,因此控制稳定化。因
此,存在难以到达评价函数值更低的第二极值的操作量的情况。
[0055]
极值控制系统200a具备偏置发生部208,由此能够对第一高频振动信号附加正或负的偏置,强制性地使高频振动信号向正或负侧移位。由此,操作量的动作是向负侧或者正侧移位,因此极值控制系统200a能够扩大搜索范围。伴随于此,极值控制系统200a能够找到评价函数值更低的区域。极值控制系统200a能够搜索出成为与第一极值相比评价函数值更低的第二极值的操作量u2。
[0056]
[第二功能的详细情况]
[0057]
图5是实施方式的对第一高频振动信号设定振幅的框线图。图5中的极值控制系统200b在还具备振幅决定部209以及乘法器210这一点上与极值控制系统200不同,但除此以外的结构相同。以下,对与极值控制系统200的不同点进行说明。
[0058]
振幅决定部209决定对第一高频振动信号设定的振幅a。振幅决定部209使第一高频振动信号的振幅a随时间而变化。例如,振幅决定部209也可以以第一高频振动信号的振幅线性增加的方式决定振幅a。另外,关于振幅a,也可以考虑操作量的值的上下限、变化率的上下限或者成套设备的制约条件等,预先设定上限值。振幅a的初始值或者增加函数也可以任意设定。
[0059]
对将极值控制系统200b应用于图2的评价函数而从初始操作量u
α
起开始搜索的情况进行说明。图6a是表示实施方式的第一高频振动信号的振幅的时序变化的第二具体例的图。图6b是表示实施方式的操作量的时序变化的第二具体例的图。图6c是表示实施方式的评价函数值的时序变化的第二具体例的图。
[0060]
如图6a所示,第一高频振动信号的振幅逐渐变大,极值控制系统200b能够扩大操作量的搜索范围。在将操作量的初始值设为u
α
的情况下,极值控制系统200b在刚开始搜索之后,由于第一高频振动信号的振幅较小,因此以第一极值的操作量u1表示出稳定的动作。但是,操作量的变动幅度进一步变大,到达第二极值的操作量u2。这样,极值控制系统200b能够进一步降低评价函数值,能够进行最优值的搜索。
[0061]
另外,第一功能和第二功能也可以分别组合而构成极值控制系统。通过组合,极值控制系统能够更稳定地进行最优值的搜索。
[0062]
图7是表示实施方式的应用对象的水处理成套设备300的概略的图。另外,控制对象过程并不限定于水处理成套设备300,也可以是具有应该最优化的评价函数值的任意的过程。以下,以实现生物学的废水处理过程的水处理成套设备300为例,对实时最优值搜索控制装置的功能进行详细地说明。水处理成套设备300是控制对象过程的一个方式。
[0063]
图7中的空心箭头表示处理对象即下水的流动。图7中的实线箭头表示从下水分离出的污泥的流动。对水处理成套设备300的概略进行说明。水处理成套设备300具备流入沟/沉沙池等301、最初沉淀池302、生物反应槽303、最终沉淀池304、过滤池305及剩余污泥贮存槽307的各贮存设备。另外,水处理成套设备300具备污泥处理泵308、污泥抽出泵321、鼓风机331、剩余污泥抽出泵341及返送污泥泵342。污泥抽出泵321在各贮存设备之间配送被处理水或污泥。鼓风机331对生物反应槽303内的下水进行曝气。剩余污泥抽出泵341是从最终沉淀池304抽出过剩的污泥的泵。由剩余污泥抽出泵341抽出的污泥与由最初沉淀池302抽出的污泥一起贮存于剩余污泥贮存槽307。贮存在剩余污泥贮存槽307中的污泥通过污泥处理泵308被输送并被处理。流入的下水沿着图7的空心箭头流动,经由流入沟/沉沙池等301、
最初沉淀池302、生物反应槽303、最终沉淀池304、过滤池305后被排放。
[0064]
在流入沟/沉沙池等301中流过的下水被蓄积在最初沉淀池302中。在最初沉淀池302中,比重比较大的不需要的物质因重力而沉降并沉淀。在最初沉淀池302中沉淀的污泥被污泥抽出泵321抽出,被送到剩余污泥贮存槽307。另一方面,上清液的被处理水被输送至生物反应槽303。
[0065]
在生物反应槽303中,向下水投入微生物。被投入到下水的微生物通过由鼓风机331进行的下水的曝气而被活化,将下水中的有机物分解,并且进行下水中的磷的去除、氨的硝化、氮的去除。通过微生物的作用,氮成分及磷成分从下水分离。经过了生物反应槽303的被处理水被送至最终沉淀池304。
[0066]
在最终沉淀池304中,污水中的活性污泥因重力而沉降并沉淀。沉淀于最终沉淀池304的活性污泥被剩余污泥抽出泵341抽出,被送至剩余污泥贮存槽307。另外,在此,一部分活性污泥通过返送污泥泵342被返送至生物反应槽303,,被再利用,以促进上述生物反应槽中的反应。另一方面,上清液的下水被输送至过滤池305。
[0067]
在过滤池305中,进行基于过滤的小的不需要物质的去除、消毒等、针对下水的最终阶段的净化处理。经过了过滤池305中的净化处理的下水作为已处理的水被排放到河流等。
[0068]
剩余污泥贮存槽307是临时贮存在生物学的排水处理过程中产生的不需要的污泥的设施。贮存在剩余污泥贮存槽307中的污泥被污泥处理泵308向污泥处理工序配送。
[0069]
在这样的生物学的废水处理过程中,操作量是返送污泥的曝气风量,控制量是排放水中含有的氮和磷的浓度(以下分别称为“排放氮浓度”和“排放磷浓度”)。排放氮浓度和排放磷浓度经过过滤池消毒设备后被计测。另外,也可以将控制量设为排放水中含有的氮和磷的量(以下分别称为“排放氮量”和“排放磷量”)。在该情况下,排放氮量及排放磷量分别通过对排放氮浓度及排放磷浓度乘以排放量而得到。
[0070]
图7中记载的评价函数是将相对于操作量的未知的值作为控制量的函数而定义的函数。在图7的情况下,评价函数是表示排放氮浓度以及排放磷浓度与评价量的关系的函数。评价函数被设定为在操作量(曝气风量)上限处的控制量与操作量下限处的控制量之间取得极值。作为设定评价函数的方法的一例,有将评价量表示为基于排水税金的想法的水质成本、返送污泥泵342的电力成本、鼓风机331的电力成本的总和(以下,称为“总成本”)的方法。
[0071]
返送污泥泵342及鼓风机331的电力成本能够根据返送污泥流量、返送污泥泵342及鼓风机331的额定功率等而算出。另外,已知通过改变返送率或鼓风机331而大幅变化的是氮浓度及磷浓度。因此,将排放氮设为tn,将排放磷设为tp,水质成本用以下的数学式(1)表示。
[0072]
[式1]
[0073]
水质成本=每单位时间的tn负荷量
×
tn成本换算系数+每单位时间的tp负荷量
×
tp成本换算系数
ꢀꢀꢀꢀ
数学式(1)
[0074]
另外,若增加曝气风量,则氮的去除率提高,因此与tn有关的水质成本减少。另一方面,若减少曝气风量,则磷的去除率提高,因此与tp有关的水质成本减少。在这样的情况下,也可以基于水质成本来设定评价函数。但是,在以磷与氮这样不具有折衷选择关系的水
质彼此的成本为指标的情况下,通过表示为对评价量加入运转成本(电力成本)后的总成本,由此评价函数被设定为在操作量(曝气风量)上限处的控制量与操作量下限处的控制量之间取得极值。
[0075]
另外,也可以在评价函数中组合如满足排放水质制约那样的制约条件。例如,设置排放水质的限制值,并组合在超过限制值时总成本增大那样的函数。在使用这样的评价函数的情况下,若超过限制值,则评价量急剧上升。因此,能够期待极值控制以将评价量抑制在限制值以内的方式发挥功能。
[0076]
与施加于操作量的摄动信号相当的第一高频振动信号的周期及发挥从评价函数值将高频振动信号的成分提取出的作用的第二高频振动信号的周期,设定为比成套设备的时间常数充分慢。由此,能够根据伴随高频振动信号的操作量的变化来捕捉评价函数的变化。
[0077]
以上,对水处理成套设备300中的极值控制的应用例进行了说明,但成为极值控制的对象的过程并不限定于生物学的排水处理过程。极值控制能够应用于具有应该最优化的评价量的任意的过程。
[0078]
图8是表示第一实施方式的控制装置1的功能结构的具体例的功能框图。控制装置1具备通过总线连接的cpu(central processing unit)、存储器、辅助存储装置等,执行控制程序。控制装置1通过控制程序的执行而作为具备极值控制部20、偏置发生部208以及偏置调整部211的装置发挥功能。另外,控制装置1的各功能的全部或一部分也可以使用asic(application specific integrated circuit:专用集成电路)或pld(programmable logic device:可编程逻辑器件)或fpga(field programmable gate array:现场可编程门阵列)等硬件来实现。控制程序也可以记录在计算机可读取的记录介质中。计算机可读取的记录介质例如是软盘、光磁盘、rom、cd-rom等可移动介质、内置于计算机系统的硬盘等存储装置。控制程序也可以经由电气通信线路来发送。
[0079]
控制装置1的极值控制部20,基于输入的评价函数值,输出使评价函数值更接近最优值的操作量。这样的极值控制部20的功能通过包含与图3所示的极值控制系统200a同样的结构来实现。因此,通过标注与图3相同的附图标记,省略与极值控制系统200a等同的结构的说明。
[0080]
偏置调整部211控制由偏置发生部208附加的偏置。例如,偏置调整部211以附加了偏置的操作量信号的大小小于曝气风量的上限值的方式设定偏置的大小。偏置调整部211将针对高频振动信号的偏置的发生定时或使偏置的附加停止的指示输出至偏置发生部208。偏置调整部211将评价函数值作为输入,计算评价函数值的周期平均,保留计算结果的历史,在偏置的前后进行周期平均值的比较。即使施加偏置,如果评价函数值的周期平均值没有变化,则偏置调整部211也输出使针对第一高频振动信号的偏置的附加停止的指示。在水处理成套设备300处于不稳定的状况的情况下,偏置调整部211输出使针对第一高频振动信号的偏置的附加停止的指示。水处理成套设备300处于不稳定的状况例如可以是在短时间内评价函数值大幅变动或不连续地迁移的状况。偏置调整部211的评价函数值的周期平均的记录定时可以任意设定。记录定时也可以以使水处理成套设备300稳定地动作为前提,而与高频振动信号的频率同步。
[0081]
偏置调整部211也可以对偏置发生部208以用任意的波形而不限于矩形波赋予偏
置的方式进指示。偏置调整部211例如也可以以确保水处理成套设备300的稳定的动作为前提,以用概率信号那样的非周期信号或者与其他控制对象中的控制量同步的信号赋予偏置的方式进行指示。
[0082]
例如在如图7所示那样的水处理成套设备300的情况下,根据由鼓风机331控制的曝气风量、由污泥抽出泵321抽出的污泥的量、由返送污泥泵342返送的污泥的量、下水的流入量、流入的下水的水质等各种信息,对水处理施加的电力及排放水的水质发生变化,因此总成本的最优值也有变化的情况。在这样的状况下,控制装置1也能够应用。
[0083]
在发生了在操作量收敛于最优值之后评价函数值的周期平均值增加的动作的情况下,偏置调整部211输出再次使偏置的附加开始的指示。另外,偏置调整部211在操作量收敛于最有值的情况下、即在确认了评价函数值成为恒定值的情况下,输出使偏置的附加停止的指示。偏置调整部211在确认了评价函数值的增加或减少但由于偏置附加而评价函数值的降低倾向并未确认到的情况下,判断为是评价函数值整体地均匀地增加的状况、而最优值没有变化,并输出使偏置的附加停止的指示。另一方面,偏置的附加由于操作量的变动大,因此有时对水质产生不良影响。因此,偏置调整部211在由于操作量的大幅变更而水质恶化的情况下,有时为了恢复到原来的水质而使偏置的附加停止。为了尽可能地避免这样的状况,偏置调整部211也可以输出如使用绝对值逐渐增大的矩形波作为附加的偏置的函数那样的指示。
[0084]
控制装置1通过使用绝对值逐渐增大的矩形波,能够在水质的限制值不超过的范围内运用水处理成套设备300。偏置调整部211也可以预先取得矩形波的值的履历。另外,偏置的绝对值的调整也可以基于评价函数值、排放水质或控制项目的运转状况等的倾向来进行。偏置调整部211在由于极值控制以外的原因而引起水质的恶化的情况下,也输出进行偏置附加的停止的指示。
[0085]
图9是表示基于第一实施方式的控制装置1的极值控制的一个具体例的图。在图9中,操作量表示曝气风量。在图9中,评价函数值表示总成本。图9的曲线图表示操作量(曝气风量)与评价函数值(总成本)的关系。图10a是表示利用以往的方法进行了极值控制的情况下的操作量以及评价函数值的随时间变化的一个具体例的图。图10b是表示用第一实施方式的控制装置1进行了极值控制的情况下的操作量以及评价函数值的随时间变化的一个具体例的图。
[0086]
在图9中,在操作量的初始值为0附近的情况下,在通过以往的方法进行了极值控制的情况下,如图10a所示,操作量收敛到0而稳定化。与此相对,在用具有图8的结构的控制装置1进行了极值控制的情况下,由于对第一高频振动信号附加正的偏置,因此得到了操作量向最优的操作量附近接近,并从该点起向评价函数值进一步降低的操作量(操作量的最优值)收敛的动作。进而,由于对操作量附加偏置,所以操作量向增加的方向移位,但伴随于此,评价函数值也增加,因此,通过极值控制的作用而以操作量返回的方式迁移。此时,偏置调整部211在附加偏置的前后,对评价函数值的周期平均进行比较,接着判断为不需要附加偏置,输出使偏置的附加停止的指示。这样,当应用第一实施方式中的极值控制时,对于具有如图9所示的特殊形状的评价函数,也能够搜索出最优的操作量(控制参数)。
[0087]
这样构成的第一实施方式的控制装置1,通过具备偏置发生部208,对第一高频振动信号附加正负的偏置。通过对第一高频振动信号附加偏置,能够收敛为更最优的操作量,
因此对于具有特殊形状的评价函数,也能够搜索出最优的操作量(控制参数)。另外,通过具备偏置调整部211,在附加偏置的前后,对评价函数值的周期平均进行比较,在判断为接下来不需要附加偏置的情况下,能够停止偏置的附加。因此,能够根据控制对象的变化来设定并维持适当的操作量。
[0088]
(第二实施方式)
[0089]
图11是表示第二实施方式的控制装置1a的功能结构的第一具体例的功能框图。控制装置1a具备通过总线连接的cpu、存储器、辅助存储装置等,执行控制程序。控制装置1a通过控制程序的执行而作为具备极值控制部20a、振幅决定部209a以及振幅调整部212的装置发挥功能。
[0090]
极值控制部20a基于输入的评价函数值,输出使评价函数值更接近最优值的操作量。这样的极值控制部20a的功能通过包含与图5所示的极值控制系统200b同样的结构来实现。因此,通过标注与图5相同的附图标记,省略与极值控制系统200b同等的结构的说明。
[0091]
振幅决定部209a基于时间来决定对第一高频振动信号设定的振幅a。例如,振幅决定部209a使第一高频振动信号的振幅a在时间上增加。
[0092]
振幅决定部209a也可以构成为,作为第一高频振动信号的振幅a,设为从振幅的初始值a0起以变化率a1在时间上线性增加的函数。控制装置1a通过具备振幅决定部209a,振幅a随着时间的经过而逐渐增加,能够扩大操作量的搜索范围。振幅决定部209a不限于线性增加函数,只要是单调增加函数,也可以用任意的函数来决定振幅a。
[0093]
振幅调整部212基于评价函数值,输出对第一高频振动信号的振幅进行调整的信号。例如,振幅调整部212也可以基于输入的操作量,输出使第一高频振动信号的振幅a的增加停止,并使第一高频振动信号的振幅a为恒定值的信号这样的指示。振幅调整部212也可以在作为积分器205的输出而加上第一高频振动信号(a
×
sinωt)后的操作量信号达到了操作量的上限值的情况下,输出实现使振幅a的值不增加而取恒定值的信号。通过这样构成,振幅调整部212在使第一高频振动信号的振幅增加的过程中,超过能够容许的操作量的上限值,从而能够防止成套设备的响应变得不稳定。
[0094]
图12是表示第二实施方式的控制装置1b的功能结构的第二具体例的功能框图。控制装置1b具备通过总线连接的cpu、存储器、辅助存储装置等,执行控制程序。控制装置1b通过控制程序的执行而作为具备极值控制部20b、振幅决定部209a以及振幅调整部212b的装置发挥功能。以下,对与第一具体例不同的点进行说明。
[0095]
控制装置1b基于输入的评价函数值,输出使评价函数值更接近最优值的操作量。这样的控制装置1b的功能通过包含与图5所示的极值控制系统200b同样的结构来实现。因此,通过标注与图5相同的附图标记,省略与极值控制系统200b同等的结构的说明。
[0096]
振幅调整部212b也可以基于水处理成套设备300的响应,输出使第一高频振动信号的振幅a的增加停止的信号。振幅调整部212b基于输入的评价函数值,运算其周期平均。振幅调整部212b将周期平均值的倾向作为履历进行记录。振幅调整部212b在周期平均值的迁移出现不连续的异常的情况下,输出使第一高频振动信号的振幅a的增加停止的指示。通过这样构成,振幅调整部212b能够在水处理成套设备300稳定地动作的状况下调整振幅a。另外,在图12的结构中,振幅调整部212b也可以在水处理成套设备300稳定地动作的状况下,根据所记录的评价函数值的平均值的倾向,在判断为观察不到评价函数值降低的倾向
时,输出使第一高频振动信号的振幅a的增加停止的信号。
[0097]
振幅调整部212b也可以在控制的中途任意地变更用于决定在振幅决定部209a中设定的振幅a的函数。例如,水处理成套设备300在下水处理控制中对操作量的变化有严格的水质限制的情况下,在不超过水质限制的范围内进行运转。此时,若变更曝气风量相对于鼓风机331的操作值,则存在水质的恶化变得显著的可能性。为了能够应对这样的情况,振幅调整部212b也可以在取得水质的响应的同时,一点点地变更第一高频振动信号的振幅a的函数。振幅调整部212b在振幅a的值对第一高频振动信号的振幅a以外的其他参数的设定指针产生影响的情况下,使得振幅a的变更信息反映于其他参数。例如,振幅调整部212b在积分增益ki的调整中需要第一高频振动信号的振幅信息的情况下,使振幅a的变更信息反映于积分器205。
[0098]
对将具有第二实施方式的结构的极值控制应用于图9所示的评价函数的情况下的效果进行说明。图13是表示第二实施方式的极值控制中的操作量以及评价函数值的随时间变化的一个具体例的图。如图13所示,可知与第一高频振动信号的振幅a的增加相应地,操作量的振动幅度扩大。随着操作量的振动幅度的扩大,评价函数值的变动幅度也变大,能够确定评价函数值降低的方向。振幅调整部212b取得评价函数值的周期平均的履历,判断出评价函数值的平均周期的履历的值不再变化这一情况,使第一高频振动信号的振幅的增加停止,输出振幅a的值成为一定值信号的指示。在操作量收敛于最优值之后,操作量、评价函数值的振动幅度恒定。
[0099]
这样构成的第二实施方式的控制装置1a,通过具备振幅决定部209a,能够决定对第一高频振动信号附加的振幅的值。由于振幅的值随着时间的经过而增加,因此能够扩大操作量的搜索范围。另外,通过具备振幅调整部212,在操作量信号达到了操作量的上限值的情况下,输出实现使振幅a的值不增加而取恒定值的信号,从而能够防止振幅的值变得过大,操作量的搜索范围过度扩大。因此,能够防止设备的响应变得不稳定,通过根据设备的变化来设定并维持适当的操作量,从而能够使设备稳定运转。另外,第二实施方式的控制装置1b,通过具备振幅调整部212b,能够任意地变更用于决定对第一高频振动信号附加的振幅的函数。通过这样构成,能够基于来自成套设备的评价函数值,一点一点地变更函数。因此,即使对成套设备设置了规定的限制的情况下,也能够实现不超过该限制,并且能够更简单地运用成套设备。
[0100]
(第三实施方式)
[0101]
第三方式是将第一实施方式和第二实施方式组合而成的实施方式。通过采用第三实施方式,与第一实施方式以及第二实施方式相比,能够掌握与更广范围的操作量变动相伴的评价函数值的变动,能够进行快速的最优值的搜索。
[0102]
图14是表示第三实施方式的控制装置1c的功能结构的具体例的功能框图。控制装置1c具备通过总线连接的cpu、存储器、辅助存储装置等,执行控制程序。控制装置1c通过控制程序的执行而作为具备极值控制部20c、偏置发生部208、振幅决定部209a以及振幅调整部212c的装置发挥功能。以下,对与第一实施方式以及第二实施方式不同的点进行说明。
[0103]
振幅调整部212c基于评价函数值的周期平均值的履历来判断水处理成套设备300的状态。例如,振幅调整部212c在操作量达到上限值的情况下或者评价函数值变得异常的情况下,对偏置发生部208输出针对第一高频振动信号的偏置附加的停止的指示,或者对振
幅决定部209a输出第一高频振动信号的振幅设定的变更的指示。
[0104]
这样构成的控制装置1c,通过具备振幅调整部212,能够基于评价函数值的周期平均值的履历来判断成套设备的状态。振幅调整部212能够根据成套设备的状态,指示针对第一高频振动信号的偏置附加的停止,或者指示第一高频振动信号的振幅的变更。因此,能够根据控制对象的变化来设定适当的控制参数,能够更简单且稳定地运用成套设备。
[0105]
上述实施方式中的控制装置1也可以构成为具备显示部和输入部。在该情况下,显示部既可以输出偏置发生部或者振幅决定部的驱动波形,也可以显示对操作量附加的摄动信号,还可以显示操作量或者评价函数值的时序变化。输入部接受用于确定摄动信号的波形的设定值。极值控制部也可以构成为基于所接受的设定值(例如振幅)来控制摄动信号的波形。具体而言,极值控制部通过将所接受的设定值输出至偏置发生部或振幅决定部,从而基于所接受的设定值对摄动信号的波形进行控制。
[0106]
显示部是crt(cathode ray tube:阴极射线管)显示器、液晶显示器、有机el(electro luminescence:电致发光)显示器等输出装置。显示部也可以是用于将输出装置与控制装置1连接的接口。在该情况下,显示部从影像数据生成影像信号,并向与自身连接的影像输出装置输出影像信号。
[0107]
输入部使用触摸面板、鼠标以及键盘等输入装置构成。输入部也可以是用于将输入装置与控制装置1连接的接口。在该情况下,输入部根据在输入装置中输入的输入信号,生成输入数据(例如,表示针对控制装置1的指示的指示信息),并输入至控制装置1。
[0108]
在上述各实施方式中,极值控制部、偏置发生部、振幅决定部以及振幅调整部为软件功能部,但也可以是lsi等硬件功能部。
[0109]
根据以上说明的至少一个实施方式,通过具有极值控制部、偏置发生部、振幅决定部以及振幅调整部,能够根据控制对象的变化来设定适当的控制参数。
[0110]
对本发明的几个实施方式进行了说明,但这些实施方式是作为例子而提出的,并不意图限定发明的范围。这些实施方式能够以其他各种方式实施,在不脱离发明的主旨的范围内,能够进行各种省略、置换、变更。这些实施方式及其变形包含在发明的范围或主旨中,同样包含在权利要求书所记载的发明及其等同的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1
- 通过计算机控制的、可以由多个用户单元同时使用的程序而进行的访问控制的方法
- 煤胶质层测定温度调节装置的计算机控制程序的制作方法
- 虚拟计算机控制装置、虚拟计算机控制方法、虚拟计算机控制程序以及集成电路的制作方法
- 虚拟计算机系统、虚拟计算机控制方法、虚拟计算机控制程序及半导体集成电路的制作方法
- 虚拟计算机系统、虚拟计算机控制方法、虚拟计算机控制程序及半导体集成电路的制作方法
- 虚拟计算机显示装置、虚拟计算机显示方法、虚拟计算机显示程序、记录介质以及集成电路的制作方法
- 过程控制的跟踪功能自动生成系统及控制程序自动生成系统的制作方法
- 样本分析方法、样本分析系统及恢复方法
- 钾钠氯血液分析计算机控制程序的制作方法
- 一种人脸皱纹的三维测量装置制造方法