壁追踪机器人的制作方法
壁追踪机器人
[0001]
本申请是中国发明专利申请(申请号:201510405184.4,申请日:2015年7月10日,发明名称:壁追踪机器人)的分案申请。
技术领域
[0002]
本发明通常涉及机器人的控制运动以在运动期间跟踪诸如壁的障碍物。
背景技术:
[0003]
移动机器人可被用于经过表面以执行各种操作,如清洁、吸尘等。诸如壁、固定物等障碍物可能对于某些移动机器人到达某些区域是困难的。例如,相邻于壁与地板之间交叉的表面对于机器人的经过是困难的。
技术实现要素:
[0004]
当机器人执行壁追踪行为时,示例机器人可以保持与壁表面接触。当机器人追踪壁表面时,与机器人缓冲器相关联的传感器能够连续使机器人的清洁垫与壁表面之间接触。传感器还可以检测缓冲器不与壁表面接触的时刻,以使机器人能够调整其自身的方向以继续追踪壁表面。
[0005]
示例机器人包括:可相对于表面移动的主体;安装在主体上的缓冲器,以使缓冲器相对于主体运动;响应于由缓冲器与表面之间的接触引起的缓冲器相对于主体的运动,产生信号的传感器;以及基于值控制主体运动以使主体跟踪表面的控制器。缓冲器在相对于主体的未压缩位置与相对于主体的压缩位置之间是可移动的。信号随缓冲器相对于主体的运动线性变化。值基于信号并且表示处于部分压缩位置的缓冲器具有在未压缩位置与压缩位置之间的压缩范围。示例机器人可以包括单独或组合的一个或多个下述特征。
[0006]
表面可包括壁表面。控制主体运动的控制器的配置可以包括使机器人保持与壁表面以大约3度至大约20度之间的角度接触的配置。机器人可包括附接至主体底部的清洁垫以及配置成从机器人分配流体的流体施加器。该清洁垫可以延伸超过缓冲器。
[0007]
控制主体的运动以使主体跟踪表面的控制器的配置可以包括使机器人执行壁追踪行为的配置,其中控制器控制主体的运动,以使主体以一定角度接触壁表面,以致缓冲器处于部分压缩位置,并且控制器调整机器人的旋转和平移速度,以保持缓冲器的压缩在部分压缩位置。控制主体的运动以使主体跟踪表面的控制器的配置可以包括在壁追踪行为中使机器人保持清洁垫与壁表面接触的配置。
[0008]
传感器可以是第一传感器并且信号可以是第一信号。机器人可包括第二传感器以产生响应于缓冲器运动的第二信号。第二信号可以随缓冲器的运动线性变化。控制器可以被编程以基于第一值和第二值计算值,第一值基于第一信号,并且第二值基于第二信号。
[0009]
主体可以具有左侧,右侧,前部和后部。第一传感器可以相邻于右侧并且第二传感器可以相邻于左侧。缓冲器可沿着机器人的前部放置并且沿着左侧和右侧部分地延伸。机器人可包括第三传感器以产生响应于缓冲器的运动的第三信号。该第三信号随缓冲器的运
动线性变化。第三传感器可以在左侧与右侧之间,并且第三传感器相邻于前部。
[0010]
传感器可以是或包括安装至缓冲器的支柱、安装至支柱的磁体,以及安装在主体中磁体上的霍尔效应传感器。传感器可以是或包括电容传感器。该电容性传感器可以包括一对电容板。基于缓冲器的运动,至少电容板可以相对于另一个电容板移动。控制器可以被编程以从响应于至少一个电容板的运动所产生的信号中确定时间常数。传感器可以是或包括电感传感器。该电感传感器可以包括基于缓冲器的运动可在绕组中可移动的芯材。控制器可以被编程,以从响应于芯材运动的信号中确定时间常数。
[0011]
表面可包括房间的壁,并且控制器可以被编程以控制主体的运动以跟踪壁表面从而通过保持压缩范围内的值来保持与壁接触。响应于在未压缩位置的预定范围内的缓冲器,控制器可以被编程以动态校准缓冲器相对于主体的位置。响应于在压缩范围以外的值以及表示比与压缩范围相关联的压缩量更进一步压缩的缓冲器,控制器可被编程以控制主体的运动以使主体从表面撤回。响应于在压缩范围以外的值以及表示比与压缩范围相关联的压缩量更少压缩的缓冲器,控制器可以被编程以控制主体的运动以使主体转向表面。
[0012]
主体可以包括轮子,并且机器人可以包括与轮子相关联的检测器。该检测器可以用于检测轮子的速度。至少部分的基于比预定速度小的轮子速度以及在压缩范围以外的值,控制器可以被编程以控制主体的运动从而使主体从表面撤回,转动远离表面,随后重新接合表面。控制器可以被编程以使主体以一定角度跟踪表面。控制器可以被编程以基于值调整角度。
[0013]
另一示例机器人可以包括:主体,其可相对于表面移动;缓冲器,其安装在主体上以使缓冲器相对于主体运动;线性传感器,响应于由缓冲器与表面之间的一段时间的接触引起的缓冲器相对于主体的运动,其产生信号;以及控制器,基于由线性传感器产生的信号,其产生一个或多个控制信号。该信号随缓冲器的运动线性变化。一个或多个控制信号用于控制主体的运动以至少在一段时间内跟踪表面。示例机器人可以包括单独的或组合的一个或多个下述特征。
[0014]
表面可包括壁表面。控制主体运动的控制器的配置可以包括使机器人保持与壁表面以大约3度至大约20度之间的角度接触的配置。机器人可包括附接至主体底部的清洁垫和配置成从机器人中分配流体的流体施加器。清洁垫可以延伸超过缓冲器。
[0015]
控制主体的运动以使主体跟踪表面的控制器的配置可以包括使机器人执行壁追踪行为的配置,其中控制器控制主体的运动,以使主体以一定角度接触壁表面,以致缓冲器处于部分压缩位置,并且控制器调整机器人的旋转和平移速度,以保持缓冲器的压缩在部分压缩位置。控制主体的运动以使主体跟踪表面的控制器的配置可以包括使机器人在壁追踪行为中保持清洁垫与壁表面之间的接触。
[0016]
线性传感器可以包括第一线性传感器和第二线性传感器。第一线性传感器可以设置在相邻于主体的第一侧,并且第二线性传感器可以设置在相邻于主体的第二侧。线性传感器可以包括设置在第一线性传感器与第二线性传感器之间的第三线性传感器。
[0017]
每个线性传感器可以包括安装至缓冲器的支柱、安装至支柱的磁体,以及安装主体中磁体上的霍尔效应传感器。每个线性传感器可以是或包括电容传感器。电容性传感器可以包括一对电容板。基于缓冲器的运动,至少一个电容板可相对于另一个电容板移动。控制器可以被编程以从响应于至少一个电容板的运动所产生的信号中确定时间常数。每个线
性传感器可以是或包括电感传感器。该感应传感器可以包括基于缓冲器的运动可在绕组中移动的芯材。控制器可以被编程以从响应于芯材运动的信号中确定时间常数。
[0018]
控制机器人的一示例方法包括:基于随机器人与表面之间的力大小线性变化的至少一个信号来确定机器人与超过阈值的表面之间的接触水平;以及控制机器人跟踪表面以保持机器人与超过阈值的表面之间的至少一个接触水平。示例方法可以包括单独或组合的一个或多个下述特征。
[0019]
阈值可以是下限阈值。方法可包括:基于至少一个信号来确定机器人与表面之间的力的大小超过上限阈值,其中上限阈值大于下限阈值,并且响应于确定的机器人与表面之间的力的大小超过上限阈值时,控制机器人从表面撤回。
[0020]
机器人可包括轮子。方法可包括检测轮子的速度,并且至少部分地基于轮子的速度,控制机器人从表面撤回,转动离开表面,随后重新接合表面。
[0021]
确定可以基于随机器人与表面之间的力的大小线性变化的两个或更多个信号。方法可以包括至少部分的基于两个或更多的信号控制一定的角度,机器人以该角度接合表面。
[0022]
本文所描述的示例机器人和方法的优点可以包括但不限于下述内容。在一示例中,机器人可以清洁缝隙、拐角,以及可能难以到达和可能积聚碎屑的其它区域。在一示例中,机器人可以清洁具有由壁和房间障碍形成的几何构造的房间。在一示例中,机器人具有能够使机器人错过房间的清洁区域的几何构造。在这样的示例中,机器人能够执行壁追踪从而进入清洁操作期间其它运动和清洁图案可能错过的区域。
[0023]
在本说明书中描述的包含在发明内容部分中的任何两个或更多的特征可以被组合以形成在文本中没有具体描述的实施方式。
[0024]
本文所描述的机器人和技术,或其部分,可以由计算机程序产品控制,该产品包括存储在一个或多个非短暂性计算机可读存储介质中并且是可在一个或多个处理设备上执行以控制(例如,坐标)本文所描述操作的指令。本文所描述的机器人,或其部分,可以被执行为所有或部分的装置或电子系统,其可以包括一个或多个处理设备和存储器以存储可执行指令从而执行各种操作。
[0025]
一个或多个实施方式的细节阐述于本文的附图和描述。其它特征和优点从说明和附图以及权力要求中将是显而易见的。
附图说明
[0026]
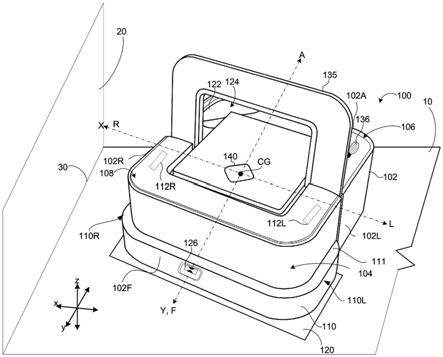
图1a是移动机器人的透视图。
[0027]
图1b是图1a的移动机器人的侧视图。
[0028]
图1c是图1a的移动机器人的俯视图。
[0029]
图1d是与图1a的移动机器人一起使用的清洁垫的俯视图。
[0030]
图1e是清洁垫的附接机构的俯视图。
[0031]
图1f是图1a的移动机器人的分解透视图。
[0032]
图1g是从图1a的移动机器人中移除的顶部的透视图。
[0033]
图1h是从图1a的移动机器人中移除的顶部的透视图。
[0034]
图2a至图2c是接触壁表面的移动机器人的缓冲器的俯视示意图。
[0035]
图3a是示出移动机器人擦洗地板表面的移动机器人的俯视图。
[0036]
图3b是执行辫形(cornrow)图案以清洁房间的移动机器人的俯视图。
[0037]
图3c是移动清洁图3b的房间周边的俯视图。
[0038]
图3d至图3h是清洁具有障碍物的房间的一示例移动机器人的俯视图。
[0039]
图4是图1a的示例移动机器人的控制器的架构的示意图。
[0040]
图5a至图5f示出清洁内拐角的移动机器人。
[0041]
图6a至图6e示出清洁周边外拐角的移动机器人。
[0042]
图7a至图7d描述清洁壁表面的移动机器人的一示例。
[0043]
图8是示出由移动机器人执行以追踪壁表面过程的流程图。
[0044]
在不同附图中的相同的附图标记表示相同的元件。
具体实施方式
[0045]
本文所描述的是配置成横穿诸如地板、地毯、草皮,或其他材料表面的示例机器人。该示例机器人可以配置成对表面执行各种操作,包括但不限制于吸尘、湿式或干式清洁、湿清洁、抛光等。
[0046]
可以以图案或者随机地横穿表面的开放区域。壁或其它障碍物(例如,具有竖直表面)可能影响机器人如何横穿表面。例如,相邻于壁的表面使用图案或随机横穿难于到达。因此,在本文所描述的示例机器人使用壁追踪(也称为跟踪)技术,其能够使机器人横穿相邻与壁或其它障碍物的表面。在文中所描述的以示例跟踪技术包括使用线性传感器来感应机器人与壁之间的力,并且响应于所感应的力控制机器人追踪壁的运动。在某些实施方式中,机器人的运动基于测量的机器人与壁之间的力的大小来控制以至所测量的力保持在目标范围内。例如,机器人能够以一定角度(例如,在5度与10度之间)接触壁,以至由于壁与缓冲器之间的摩擦,缓冲器被部分的压缩。其他实施方式也被描述。
[0047]
本文中所描述的示例跟踪技术可以与在其运行中遇到壁或其他障碍物的任何适合类型的机器人或者其它装置一起使用。采用该跟踪技术的机器人的一示例是移动机器人,其能够围绕房间导航来清洁房间的地板表面。参照图1a,在某些实施方式中,移动机器人100导航并清洁具有侧壁表面20的房间的地板表面10。在某些实施方式中,机器人的重量小于5磅(例如小于2.26kg),并且具有中心cg。在某些实施方式中,移动机器人可以是自动的。机器人100包括由轮子(在图1a中不可见)支撑的主体102,例如,该轮子能够基于具有x、y和θ部件的驱动指令来操纵机器人100横跨地板表面10。如图所示,机器人主体102具有正方形的形状并且限定x轴和y轴。x轴限定机器人100向右的方向r以及机器人100向左的方向l。y轴限定机器人100向后的方向a(向后)以及机器人100向前的方向f。在其它实施方式中,主体102可以具有其它形状,诸如圆形、椭圆形、表面滴斑形、长方形、前面正方形或长方形以及后面圆形的组合、或者任何这些形状的纵向不对称组合。主体102包括底部(未示出)以及顶部108。
[0048]
沿着机器人主体102的底部,位于机器人100的两个后角的一个或两个中的一个或多个后悬壁传感器(未示出)以及位于移动机器人100的前角中一个或两个中的一个或多个前悬壁传感器(未示出)检测突出部分或地板表面10的其它陡峭台阶,并且防止机器人100在该地板边缘落下。悬壁传感器可以是机械下降传感器或者是基于光的接近传感器,诸如,
ir(红外线)对、双发射器、单接收器或者双接收器、单发射器ir基于光的接近传感器,其在地板表面10向下瞄准。
[0049]
主体102承载可移动缓冲器110用于在纵向(a,f)或横向(l,r)方向检测碰撞。缓冲器110安装至机器人主体102的前侧102f并且缠绕至机器人主体102的右侧102r和左侧102l。缓冲器110具有补足机器人主体102的形状并且向前延伸机器人主体102。缓冲器100包括延伸的较低部分111,以至前侧102f的总体尺寸宽于机器人主体102的后侧102a。机器人主体102支撑缓冲器110,以至缓冲器110可以相对于机器人主体102平移并旋转。因此,缓冲器110的右部110r和左部110l可以在不同的方向移动。如将在本文中更加详细地描述,左缓冲器传感器组件112l和右缓冲器传感器组件112r定位在机器人100中,以致左缓冲器传感器组件112l能够检测缓冲器110的左部110l的运动,并且右缓冲器传感器组件112r能够检测缓冲器1110的右部110r的运动。右缓冲器传感器组件112r位于相邻于机器人主体102的右侧。左缓冲器传感器组件112l位于相邻于机器人主体102的左侧102l。通常,缓冲器传感器组件112l、112r可以是线性传感器组件,其提供模拟信号,该信号相对于缓冲器110上的力是线性的。在某些实施方式中,如在本文中所描述的,附加传感器组件可以包括在机器人中,例如左与右传感器组件之间。
[0050]
在某些示例中,使用的提供模拟传感器的线性传感器能够提供各种优点。例如,线性传感器提供随缓冲器压缩程度变化的信号。如果缓冲器被压缩至未压缩位置与完全压缩位置之间的一半的形式,来自传感器的电压或电流值将是缓冲器完全压缩时的值的一半。
[0051]
参照图1b,机器人主体102的底部包括附接的清洁垫120。机器人主体的底部包括当机器人100关于地板表面10导航时可旋转支撑机器人主体102的后部106的轮子121。每个轮子121可与电流传感器123一起操作,电流传感器确定输送至每个轮子121的电流。每个轮子121还可以与编码器相关联并且与编码器可一起操作,该编码器确定每个轮子121的位置。编码器是可选的编码器,其检测轮子121的旋转位置。基于旋转位置,机器人100的控制器能够确定轮子121的加速度和/或速度。当机器人100关于地板表面10导航时,清洁垫120支撑机器人主体102的前部。机器人在向前的驱动方向f上没有移动的情况下,电流传感器123和编码器一起可感应机器人100的轮子被驱动的时刻。
[0052]
在机器人主体102中的贮液器122保持清洁流体124(例如,清洁溶液、水,和/或洗涤剂)。在某些示例中,贮液器122的容量为170ml至230ml或大约200ml。机器人100包括通过机器人主体102中的管连接至贮液器122的流体施加器。在某些示例中,流体施加器126可以是喷雾器或喷雾机构。
[0053]
机器人100的顶部108可包括手柄135,用于在用户搬运机器人100。当折叠时,手柄135置于机器人100的顶端108的凹进处。顶部108还可以包括设置于手柄135下方的切换按钮136,其可以激活垫的释放机构。用户也可以按清洁按钮140以打开机器人100并指示机器人100开始清洁操作。清洁按钮140也可以用于机器人的其它操作,例如,关闭该机器人100和/或建立一个虚拟阻挡位置。
[0054]
参照图1c,在某些情况下,清洁垫120可延伸超过缓冲器110的宽度,以至机器人100可以使垫120的外边缘向上定位并沿着强硬到达表面或进入缝隙,例如,壁-地板界面30。在某些示例中,清洁垫120延伸超过机器人100的主体102大约0.1mm至10mm(例如,0.5mm至2mm,1mm至3mm,1mm至5mm,2mm至5mm,3mm至6mm,5mm至10mm,大约1mm,大约5mm,大约
10mm)。在这样的实施方式中,清洁垫120的端部接触壁表面20,并且如本文所描述的,由于清洁垫120上的摩擦力,可引起缓冲器110移动。在一实施方式中,清洁垫120向上延伸至边缘,并且不会显著的延伸超过机器人的垫保持器(未示出)。在这种情况下,缓冲器110接触壁表面20并且由于缓冲器与壁表面20之间的摩擦而移动。
[0055]
机器人100可以推动垫120的边缘倚靠壁表面或其它竖直延伸表面。当机器人100以一段时期的壁追踪运动移动时,清洁垫120的定位还允许通过清洁垫120的延伸边缘,使清洁垫120清洁表面或者壁的缝隙或者其它竖直延伸表面。因此,清洁垫120的扩展能够使机器人100在机器人主体102能够达到之外的裂缝和缝隙中清洁。如本文所描述的,当机器人100启动沿房间侧表面(例如,壁表面20)的壁追踪图案或行为,清洁垫120可压靠壁表面20,从而沿壁-地板界面30放置的碎屑可以由清洁垫120捡起。
[0056]
参照图1d,在一示例中,清洁垫120包括吸收层152、外缠绕层154,以及卡背156。垫120具有直截了当地切割端部158,以至吸收层152暴露在垫120的两端,并且垫120的全长可用于吸收流体和清洁。所吸收的清洗液可通过吸收层152牢固地保持,以致清洗液不会从清洁垫120滴落。在某些情况下,清洁垫120是一次性的。在其它情况下,清洁垫120是可重复使用的(例如,可机洗)具有耐用的塑料背衬的微纤维布垫。
[0057]
此外,参照图1e,清洁垫120可以由垫保持器160固定至机器人100的底部。垫保持器160可以通过抓紧卡背156牢固地将清洁垫120保持在一定位置。清洁垫120可以从任两个相同方向(彼此对置的180度)安装到垫保持器160。当使用切换按钮136(图1a中所示)触发垫释放机构162时,垫保持器160可以释放清洁垫120。
[0058]
参照图1f至1h,支柱164横穿机器人主体102以将缓冲器110的缓冲器底盘171附接至机器人主体102。缓冲器底盘171固定至缓冲器110(例如,使用紧固件)。参照图1g,支柱164插入由机器人主体102限定的孔166中。支柱164可具有沿其长度尺寸变化的横截面直径,并且尺寸还适于安装在由机器人主体102限定的孔166中。支柱164可以由塑性材料制成的(例如,弹性体或其它有弹性的材料)。支柱164的材料允许在缓冲器110与环境中的障碍物或竖直定向的或延伸的表面之间接触时,缓冲器110和缓冲器底盘171相对于机器人主体102移动。
[0059]
参照图1h,机器人100包括左传感器组件112l和右传感器组件112r以检测缓冲器110相对于机器人主体102的运动。在某些实施方式中,可以包括附加传感器组件(多个),例如,中心传感器组件(本文所描述的)。在某些实施方式中,左和右传感器组件112l、112r包括线性传感器。在某些实施方式中,线性传感器具有响应于所施加力的响应,其在至少一个有限的范围内是线性。在某些实施方式中,响应可以在所施加的力的整个范围内是线性的,而在其它实施方式中,响应可以仅在所施加力的限制范围内是线性的。在其它实施方式中,可以使用非线性传感器并且来自非线性传感器的信号可以通过例如机器人的控制器重新绘制,以计算所施加的力相对于信号幅度的推算。示例线性传感器包括霍尔效应传感器,电容传感器,或电感传感器。可以使用任何适合类型的线性传感器。下面的示例表达霍尔效应传感器的使用,其可以是响应于磁场改变其输出电压的变换器。霍尔效应传感器可操作为一个模拟变换器,其响应于磁场直接返回模拟电压信号。用已知的磁场,距霍尔板的距离可以被确定并且磁体的相对位置可以基于所测量的电压推导。
[0060]
参照图1f,缓冲器底盘171包括左底座或左磁体170l安装和安置的支柱168l。左磁
体170l形成上文描述的左缓冲器传感器组件112l的一部分。缓冲器底盘171还包括用于右缓冲器传感器组件112r的右支柱168r和右磁体170r。磁体170l可耦接于缓冲器底盘171的支柱168l,其允许磁体170l相对于机器人100的机器人主体102移动。
[0061]
返回图1h,在该示例中,平台172固定至机器人主体102。当在缓冲器110相对于机器人主体102移动时,固定至缓冲器110的缓冲器底盘171也相对于平台172移动。缓冲器底盘171也可以附接至有弹性的支柱164以消除缓冲器110的动态响应(例如,响应于来自与环境中的障碍物接触的力),消耗缓冲器的动能,并吸收机械冲击。
[0062]
在某些实施方式中,平台172包括电路板174,其包括左霍尔效应传感器176l和右霍尔效应传感器176r。在某些实施方式中,缓冲器传感器组件112l和112r包括附接至机器人主体102(例如,传感器176l、176r)的第一部件以及经由缓冲器底盘171(例如,磁体170l,170r)附接至缓冲器110的第二部件。返回图1c,左缓冲器传感器组件112l包括耦接至机器人主体102的左传感器176l和经由缓冲器底盘171耦接至左部110l的左磁体170l。右缓冲器传感器组件112r包括耦接至机器人主体102的右传感器176r和经由缓冲器底盘171耦接至缓冲器110的右部110r的右磁体170r。左传感器176l定位在机器人主体102的左侧102l上或附近并且定位在左磁体170l的上方。右传感器176r定位在机器人主体102的右侧102r上或附近并且定位在右磁体170r的上方。霍尔效应传感器176l和176r产生响应于附近磁场的电压,例如由磁体170l和170r产生的磁场。
[0063]
左和右缓冲器传感器组件112l和112r的配置允许左和右传感器176l和176r来检测磁体170l和170r相对于传感器176l和176r的运动。磁体170r、170l产生磁场,该磁场在磁体170r、170l远离或靠近传感器176r、176l移动时在传感器176r、176l位置的强度发生变化。依次,左和右的传感器176l和176r响应于左和右磁体170l和170r分别相对于左和右的传感器176l和176r的运动而产生电压。该电压随磁场的改变发生线性变化。因此,该传感器176l和176r提供模拟响应信号,其基于缓冲器110被压下的程度发生变化。当磁体170l和170r远离其各自的传感器176l和176r移动时,在传感器176l和176r位置的磁场的强度削弱,因此传感器176l和176r产生较小的电压。相反,当磁体170l和170r靠近各自的传感器176l和176r移动时,在传感器176l和176r位置的磁场的强度增加,因此传感器176l和176r产生较大的电压。一旦传感器176l和176r耦接至机器人主体102并且磁体170l和170r耦接至缓冲器110,由传感器176l和176r产生的模拟电压对应于缓冲器110相对于机器人主体体102的运动,这是由于例如缓冲器110与房间中诸如壁的障碍物的接触。例如,壁与缓冲器110之间的摩擦力引起缓冲器110在未压缩与部分压缩位置之间移动,使霍尔效应传感器记录由于壁与缓冲器之间的摩擦随而使缓冲器经历的压缩量线性变化的电压。更具体地,来自传感器176l、176r的信号(例如,传感器176l、176r的电压)随缓冲器110相对于机器人主体102的运动线性变化。
[0064]
虽然传感器176l和176r已被描述为霍尔效应传感器,在某些实施方式中,该传感器可以是电容传感器,以致缓冲器传感器组件基于由电容传感器感应的电容变化来操作。例如,电容板可以代替磁体170l和170r,并且相应的电容板对可以代替霍尔效应传感器176l、176r。左和右板成对的电容可使用的各种技术独立地测量,例如,通过测量一个rc(电阻-电容)时间常数动态地测量电耦合。左和右成对的电容可以根据电容传感器距电容板的距离线性变化。在某些实施方式中,传感器176l、176r可以是电感传感器。在这种情况下,电
路板上的电容板用作为感应器的螺旋pcb(印刷电路板)痕迹替换。缓冲器底盘171可包括穿过螺旋痕迹的芯材(而不是磁体170l和170r)。当缓冲器110压缩时,横穿螺旋痕迹的芯材料的量可以变化,因此导致在电感的变化。这些迹线的电感可以通过测量电感耦合来测量,例如通过动态地测量具有振荡电路的lr(电感-电阻)或lrc(电感-电阻-电容)时间常数。
[0065]
虽然左和右传感器组件112l和112r已在上文描述,在某些实施方式中,机器人可附加和/或替代地包括位于机器人左侧与机器人右侧之间的前传感器组件。该前传感器组件可以位于相邻于机器人的前侧并且能够响应于缓冲器在例如向右方向r和向左方向l运动产生信号。因此,前传感器组件能够检测缓冲器在横向方向上的力。
[0066]
虽然磁体170r、170l已经描述成固定至缓冲器110并且传感器176r、176l已经描述成固定至机器人主体102,在某些实施方式中,传感器可以固定至缓冲器并且磁体可以固定至机器人本体。在这样的实施方式中,传感器和磁体可相对于彼此移动,以使传感器处的磁场变化。
[0067]
如图2a、图2b和图2c所示,缓冲器110的中立位置110n以虚线示出。中立位置110n对应于力施加于缓冲器110以引起缓冲器110相对于机器人主体移动(例如,压下)之前的缓冲器110的位置。如本文中更详细的描述,中立位置110n可以从一个清洁操作到另一个清洗操作变化。在清洁操作期间,机器人100可以校准的中立位置110n以致中立位置110n被解释为缓冲器110的非压缩状态。在本文中缓冲器110的压缩也可互换地称为缓冲器110的向后平移。在图2a、图2b和图2c描绘缓冲器110的实线对应于力引起的缓冲器相对于机器人主体102移动之后的缓冲器110的位置。
[0068]
缓冲器110可以根据缓冲器110上的力的方向和位置移动(例如,与缓冲器110接触的障碍物的相对方向和相对位置)。参照图2a,当右部110r和左部110l在向后的方向a移动时,缓冲器110相对于机器人主体102在向后方向a上平移。当机器人100在向前的方向f移动时,缓冲器110的前部110f与诸如壁表面20的障碍物之间的接触可引起缓冲器110在向后方向a上的平移。参照图2b,当机器人100遇到在机器人主体102左侧的障碍物时,缓冲器110在左部110l被压下的程度比右部110r更大。左部110l在向后方向a上移动,而右部110r在前进方向f或在向后方向a上移动,以致右部110r被压下的程度小于左部110l。缓冲器110向后方向a上平移或者相对于机器人主体102逆时针方旋转,以致例如清洁垫的前方相对于机器人主体102成一定的角度。当机器人100在向前方向f上移动时,缓冲器110的左部110l与壁表面20之间的接触可引起缓冲器110的顺时针旋转向后平移,这是由于例如左部110l与壁表面20之间的摩擦。参照图2c,当机器人100遇到机器人主体102右侧的障碍物时,缓冲器110在右部110r压下的程度比左部110l更大。右部110r在向后方向a上移动,而左部110l在向前方向f或向后方向a上移动,以致左部110l被压下的程度小于右部110r。缓冲器110向后平移并相对于机器人主体102顺时针旋转,以致例如清洁垫的前方相对于机器人主体102成一定角度。当机器人100在向前方向f移动时,缓冲器110的右部110r与壁表面20之间的接触可引起缓冲器110的顺时针旋转和向后平移,这是由于例如右部110r与壁表面20之间的摩擦。参照图1h,左和右缓冲器传感器组件112l和112r可以检测上文描述的左部110l和右部110r相对于图1a至图1c的运动。换言之,左和右缓冲器传感器组件112l和112r可配置成检测缓冲器110的左和右部110l和110r的压缩。
[0069]
尽管缓冲器110已经描述成接触环境中的诸如竖直表面(例如,壁)的障碍物以便
移动,在某些实施方式中,缓冲器110也可以由于清洁垫与环境中表面的接触而移动。
[0070]
本文中所描述的示例机器人可以通过追踪图案横穿表面,或通过随机地横穿来横穿表面。机器人的示例导航行为可包括壁追踪图案和区域覆盖图案。例如,壁追踪图案可以是直运动图案,并且区域覆盖图案可以是蔓藤图案,辫形图案,或这些图案的任意组合。其他图案也是可能的。
[0071]
在直线运动图案中,机器人100通常以直线路径移动以追踪由诸如壁的竖直边缘限定的障碍。直线运动图案通常对应于墙追踪行为。鸟足状(birdfoot)图案的连续和重复使用被称为蔓藤图案或蔓生图案。在蔓藤(vine)图案中,机器人100执行一个鸟足状图案的重复,其中机器人100来回移动同时渐沿大致向前的轨迹逐渐推进。所述鸟足状图案的每个重复沿大致向前的轨迹推进机器人100,以及重复执行鸟足状图案可以允许机器人100以大致向前的轨迹横穿地板表面。在辫形图案中,机器人100前后移动横跨整个房间,以使机器人100垂直于每次横穿房间以形成横穿地板表面的一系列大致平行的排之间的图案的纵向运动来移动。机器人100可以执行当机器人100横穿房间时使用蔓藤和辫形图案以及当机器人100关于房间的周边或房间中物体的边缘移动时使用直线运动图案的导航行为。
[0072]
参照图3a,在一示例中,机器人100以上文提到的鸟足状图案移动穿过清洁流体124施加于其上的地板表面10上的足迹区域af。所描绘的鸟足状图案涉及(i)沿中心轨迹300在向前方向f和向后或反向方向a上移动机器人100,(
ⅱ
)沿左轨迹310在向前方向f和相反方向a上移动机器人100,(iii)沿右轨迹305在向前方向f和相反方向a上移动机器人100。左轨迹310和右轨道305是弧形的,其从起始点沿中心轨迹300以弧线向外延伸。虽然右和左轨迹305、310已描述并示出为弧形,但是在其它实施方式中,左轨迹和右轨迹可以是从中心轨迹以直线向外延伸的的直线轨迹。
[0073]
在图3a的示例中,机器人100从位置a沿着中心轨迹300在向前方向f上移动。随后,机器人100沿中心轨迹在向后方向a上移动的距离等于或大于由施加流体覆盖的距离。例如,机器人100沿中心轨迹300向后移动至少一个机器人的长度l
r
到位置g,其可以与位置a是同一位置。机器人100施加清洗流体124的区域基本上等于或小于机器人100的足迹区域af。当机器人返回至壁20时,清洁垫120穿过清洁流体124并且清洁地板表面10。从位置b,机器人100分别沿左轨迹310或右轨迹305缩回在到达位置e或位置c之前到位置f或位置d。在某些情况下,位置c、e可以对应于位置b。随后,机器人100可以继续完成其剩余轨迹。每次机器人100沿着中心轨迹300、左轨道310和右轨道305向前和向后移动,清洁垫120穿过所施加的流体124,从地板表面10擦洗污垢、碎屑和其它颗粒物质,并且吸收远离地板表面10污垢流体。与清洁流体124的溶剂特性组合的清洁垫120的擦洗运动发生故障并且释放干燥的污渍和污垢。由机器人100施加的清洁流体124使释放的碎屑悬浮,以致清洁垫120吸收悬浮的碎屑并且将其带走远离地板表面10。
[0074]
参照图3b,机器人100可以在房间320中导航,其追踪执行上文所描述的蔓藤图案和辫形图案的组合的路径325以覆盖房间的地板表面10。辫形图案的每一排与相邻排隔开的间距为距离d。在该示例中,机器人100以需要使用清洁流体124的清洁模式操作,所以机器人100沿路径325施加充满机器人100的前部的清洁流体124。机器人100沿路径325通过执行蔓藤图案推进,其包括沿辫形图案的每个长度的鸟足状图案的重复。用如本文中所述描述的每个鸟足状图案,机器人100在一定位置结束,其通常在相对于其初始位置前进方向
上。
[0075]
路径325允许机器人100清洁房间的区域326,但路径325的蔓藤和辫形图案可以使机器人100错过房间的清洁区域327。该区域327具有宽度w,例如,该区域可以是狭窄过道。在某些情况下,区域327的宽度w小于辫形图案排之间的距离d的两倍。因此,当机器人100执行辫形图案时,机器人100可以接触壁20,而不进入区域327,因此简单地使用辫形图案可能无法清洁区域327。如本文所描述的,在某些实施方式中,机器人100可以检测门路328或其它狭窄区域,该狭窄区域具有的宽度大概小于2个机器人的宽度,其基于追踪路线的壁将区域327从室320的其余部分分隔开。
[0076]
壁追踪行为允许机器人100沿壁/地板界面(例如,图1的壁-地板就界面30)清洁,清洁房间的拐角,并发现和清洁邻近于壁表面20的未清洁区域,例如,区域327。参照图3c,使用辫形和蔓藤图案执行区域的清洁之后,机器人100可以执行壁追踪以清洁房间的周边。机器人100追踪路径350,因为它通过以很小的角度并且施加于机器人100的相对恒定的力与壁表面20连续地接合执行直线运动图形。一旦机器人100在使用清洁液体124的清洁模式下操作,机器人沿路径350施加机器人100前部的清洁流体124。在某些示例中,在很小的角度(例如,机器人的边缘和壁不平行于彼此)的壁表面接触可以提供将清洁垫的一部分压靠在壁表面上的优点,以致整个地板到壁被清洁垫清洁。在某些示例中,在很小的角度的壁表面接触可以提供使机器人确定它的位置倚靠壁(例如,用垫延伸至壁),而不会引起机器人与壁表面之间的接触和摩擦的优点,以阻止机器人向前方向上的运动。
[0077]
如本文所描述的,壁追踪技术可以允许机器人100清洁在沿图3b的路径325的辫形和蔓藤行期间错过的区域。在某些情况下,简单地执行辫形和蔓藤行为可导致机器人100忽视清洁房间的一定区域,例如由于障碍物、房间的几何特征,和机器人100的几何特征。机器人100追踪壁表面20时,机器人100可以进房间320的区域327,并且机器人100的控制器可确定机器人100在早期执行辫形和蔓藤图案期间没有清洁区域327。在某些情况下,当发现区域327时,机器人100可以在区域327内执行随后的辫形和蔓藤图案。在其它情况下,机器人100可以执行墙追踪,并且控制器可以确定关于区域327的壁20的壁追踪足以清洁区域327的地板表面。
[0078]
参照图3d,在另一示例中,机器人100周围的具有障碍物375的房间372导航。机器人100通过追踪路径380来执行诸如穿过房间372的辫形图案的区域清洁图案以清洁房间372的区域382。但是,由于与障碍物375(例如,厕所)的接触,路径380的排380a、380b短于其它排,因此,机器人100不清洁区域384。因此,机器人可进入的后面的区域(如,区域384)或由障碍物(例如,障碍物375)遮掩的区域可以保持在区域清洁行为期间没有横穿。
[0079]
参照图3e,机器人100完成辫形和蔓藤路径380之后,例如,机器人100通过接近房间372的壁20和追踪路径390沿区域384的周边执行壁追踪。当缓冲器接合壁20以沿房间372的壁20清洁时,机器人100通过将平均缓冲器程度保持在制定的范围内来保持与壁20的接触。路径390允许机器人100清理障碍物375的后面,先前的机器人100以辫形和蔓藤图案无法达到该区域。
[0080]
在某些情况下,区域384可以足够大,以保证在区域384中执行后续的辫形和蔓藤图案。当机器人100沿壁20清洁时,机器人100可以识别出由壁20限定的边界不可以匹配当机器人100执行辫形图案时由控制器确定的边界。随后,机器人100可继续发现障碍物375并
且通过追踪障碍物路径391围绕障碍物375清洁。机器人100沿由障碍物375限定的侧表面执行壁追踪行为,以致机器人能够清洁障碍物375与地板表面10之间的界面。
[0081]
使用辫形和蔓藤图案,机器人100不能进入仅稍微大于机器人宽度(例如,1至1.2倍、1.2至1.4倍、1.4至1.6倍、1.6至1.8倍,1.8至2倍)的通道。在另一示例中,现在参照图3f至图3h,机器人100清洁具有由门路395分隔开的第一房间393和第二房间394的环境392。第二房间394足够大,以保证机器人100执行辫形和蔓藤图案。如图3f所示,机器人100执行例如辫形和蔓藤图案的区域覆盖图案396以清洁第一房间393。使用区域覆盖图案396,机器人100不能够清洁门路395和第二房间394,因为当机器人100执行区域覆盖图案的排396a时,机器人100接触的环境392的壁表面20并且不能够通过门路395进入第二房间394。每一排辫形图案与相邻排间隔的一定距离d
r
,该距离大约是机器人100的宽度。门路395具有宽度w
d
。在某些情况下,宽度w
d
是小于两倍的距离d
r
。如图3g所示,在完成第一房间393中的区域覆盖图案396时,机器人100执行壁追踪图案397。追踪壁追踪图案397的机器人100能够行进通过门路395并进入第二房间394。现在参考图3h,第二房间394是足够大的,机器人100可以执行的区域覆盖图案398以清洁第二房间394。当使用在图3g中所示的壁追踪图案397进入第二房间394时,机器人100执行区域覆盖图案398以清洁第二房间394。
[0082]
参照图4,机器人100的控制系统400的一示例包括控制电路405(文中也被称为控制器),其操作驱动器410,清洁系统420,具有缓冲器传感器系统435的传感器系统430,行为系统440,导航系统450,和存储器460。
[0083]
驱动器410可包括轮子(例如,图1b所示的轮121),以基于具有x、y,和θ部件驱动指令操纵横跨地板表面的机器人100。驱动器410的轮子支撑地板表面上方的机器人本体。控制器405可进一步操作配置成关于地板表面操纵机器人100导航系统450。导航系统450基于行为系统440上的导航指令,其可以选择存储在存储器460中的导航图案或行为。导航系统450还使用机器人的碰撞传感器、加速计,以及其它传感器与传感器系统430进行通信,以确定并发出驱动指令至驱动器410。
[0084]
传感器系统430还可以包括用于轮子(例如,图1b所示的轮子121)的3轴加速计,3轴回转仪,以及旋转编码器。控制器405能够利用从3轴加速度计感应的线性加速度来推算在x和y方向上的偏离并且可利用的3轴回转仪来推算在机器人100的航向或取向中的偏移。从而,控制器405可以组合由旋转编码器、加速计,以及回转仪采集的数据,以产生机器人100的一般姿态(例如,位置和取向)的推算值。在某些实施方式中,机器人100可使用编码器、加速计,以及回转仪,以使机器人100执行辫形图案时,机器人100保持在大致平行的排上。通过控制器405,回转仪和旋转编码器一起还可以用于执行航位推算算法,以确定环境中的机器人100的位置。传感器系统430还包括用于轮子121(图1b所示)的电流传感器123。控制器405可以使用从电流传感器123检测的电流,以确定传送至每个轮子121的电流量,随后,估算轮子121的速度。
[0085]
控制器405操作的清洁系统420以启动例如用于一段时期、一定频率喷雾指令。喷雾指令可以根据存储在存储器460的喷雾时间表发出。控制器405还可以操作清洗系统420来振动清洁垫120以擦洗地板表面10。
[0086]
传感器系统430的缓冲器传感器系统435包括缓冲器传感器组件112l和112r,其检测缓冲器110与环境中物体的接触。控制器405可以通过解释由缓冲器传感器组件112l和
112r产生的电压来执行缓冲器传感器系统435。
[0087]
返回图2a至图2c,使用来自缓冲器传感器系统435的信号,控制器405能够确定缓冲器110的左部110l被压缩的程度(文中也称为左缓冲器程度),并且能够确定缓冲器110的右部110r被压缩的程度(本文中也被称为右缓冲器程度)。在其它情况下,缓冲器传感器系统435可以感应左部110l和右部110r在压缩的状态,这可能表示在机器人100的向前方向f上的与障碍物的接触,如图2a所示。左缓冲器程度和右缓冲器程度分别可以是缓冲器110压缩状态与缓冲器110的未压缩状态之间压缩的量。
[0088]
返回图1h,磁体170l和170r相对于传感器176l和176r的位置可被设置成当缓冲器110被压缩时使得磁体170l和170r相对于传感器176l和176r移动。因此,当缓冲器110被压缩时,由传感器176l和176r产生的电压发生改变。尤其是,当磁体170l、170r靠近传感器176l、176r移动时,由于缓冲器110的压缩,由传感器176l产生的电压增加,缓冲器包括容纳传感器176l、176r的缓冲器底盘171。因此,左和右缓冲器程度线性成比例于所产生的电压。机器人100的控制器405可以使左缓冲器程度和右缓冲器程度标准化为百分比,并能确定的左缓冲器程度和右缓冲器程度的平均缓冲器程度。对于每个清洗操作,控制器405还可以动态校准左缓冲器程度和右缓冲器程度,以使0%对应于缓冲器110的未压缩状态并且100%对应于缓冲器110的压缩状态。负百分比可以表示缓冲器110的扩展。如本文所描述的,控制系统400可利用缓冲器传感器系统435以及检测的左和右缓冲器程度来执行壁追踪行为,其允许机器人100跟踪壁或其它障碍物(如浴室固定物)的表面,从而清洁清洁难以访问的拐角以及由地板表面和壁表面的交叉限定的缝隙。例如,当追踪壁时,由于缓冲器110与壁之间的摩擦,机器人100的缓冲器110将部分压缩。机器人100可以保持与壁接触,通过保持缓冲器压缩的程度以及通过连续地调整机器人100的旋转和平移速度以保持接近恒定的压缩来保持左和右缓冲器压缩之间的差值。
[0089]
在其它情况下,机器人100可以计算左缓冲器程度和右缓冲器程度之间的差值。正差值表示左缓冲器程度大于右缓冲器程度,并且负差值表示右缓冲器程度大于左缓冲器程度。当机器人100执行壁追踪以使缓冲器110的左部110l相邻壁表面20a时,机器人100可以保持差值在下述范围内,例如,0%至10%、5%至15%、4%至20%。当机器人100执行壁追踪以使缓冲器110的右部110r相邻壁表面20a时,通过发出驱动指令至驱动器410,机器人100的控制器405可以保持差值在下述范围内,例如,-5%至-15%、-10%至0%、-20%至-4%。可替代地,控制器405可以确定左缓冲器程度和右缓冲器程度的平均值。
[0090]
存储器460可加载阈值并且限制相关的标准化平均缓冲器程度,如本文所描述的。存储器460也可以加载制造机器人100期间执行的静态校准结果。该静态校准结果可以限定一范围,在该范围中,机器人认为所描述的动态校准是有效的。在某些示例中,当机器人被重复使用时,保持缓冲器的支柱的位置将有少量改变。为了考虑该变化,校准过程可用于确定缓冲器的未压缩位置和相关联的传感器读数是否已改变。每个清洁任务之间,该校准可在启动机器人时执行和/或在清洗期间,该校准可以每5-10秒动态地执行。
[0091]
返回图1a、图3c和图4,当机器人100追踪房间320的壁20时,机器人100可以执行特定的过程,其允许机器人100清洁紧密邻接壁表面20的地板表面10。控制器405能够控制机器人主体102运动,以使主体102基于所述平均缓冲器程度的值跟踪壁表面20。该值基于由缓冲器传感器系统435(例如,缓冲器传感器组件112l和112r)产生的信号或多个信号,并且
该值可以表示缓冲器110部分地压缩,以致该值在压缩范围内或在未压缩状态与压缩状态之间的间隔内。随后,控制器405可确定缓冲器110是否在压缩范围或间隔(例如,基于标准化的缓冲器程度)内。例如,控制器405可确定缓冲器已达到用于壁追踪的阈值压缩水平,例如2%至2.5%、2.5%至3%、3%至3.5%、3.5%至4%、4%至4.5%、4.5%至5%、5%至5.5%、5.5%至6%、6%至6.5%、6.5%至7%、7%至7.5%。随后,壁追踪过程可以被执行并且不减弱的继续,只要缓冲器保持压缩在压缩与未压缩状态之间的预定范围内(例如,2%至5%、2.5%至7.5%、5%至10%、5%至15%、7.5%至12.5%、10%至15%、5%至20%、10%至20%)。即,壁追踪过程继续,只要缓冲器与机器人之间的力的大小保持在指定范围内。机器人100可以通过不断调整机器人100的旋转和平移速度来保持力的大小在指定的范围内,以保持缓冲器的几乎恒定压缩。如果压缩量超过上限阈值(例如,20%),则壁跟踪过程可以停止,并且其它过程可接管机器人的控制以重新建立横穿图案或重新接合壁或其它障碍物以继续壁追踪,如本文所描述的。
[0092]
在预定范围或间隔内,机器人100的控制器405还可以保持平均缓冲器程度,并且在某些情况下,通过不断调整其旋转和平移速度使左和右缓冲器程度之间的差值维持接近恒定的压缩。虽然壁追踪,机器人100可以以标定的平移速度行进(例如,50mm/s至150mm/s、150mm/s至250mm/s、250mm/s至350mm/s),而不是旋转。当平均缓冲器程度偏离于存储在存储器460中的目标平均缓冲器程度时,控制器405可以递送驱动器指令至驱动器410,以减少机器人100的速度,该量与偏离量成比例。当缓冲器程度差值偏离于存储在存储器460中的目标差值时,控制器405可以递送驱动器指令至驱动器410,以增加机器人100的旋转速度,该量与偏离量成比例。在某些实施方式中,旋转和平移速度可以调整一定的量,该量分别与平均碰撞程度和碰撞程度差值的变化速率成比例。
[0093]
在某些情况下,从一个清洁操作到另一个清洗操作的未压缩位置可以不同,因为将缓冲器110安装至机器人主体102的有弹性的支柱164(图1f所示)的位置变化。清洁操作期间,控制器405可以动态地校准未压缩位置以考虑缓冲器110相对于机器人主体102的位置的变化。控制器405可以校准缓冲器相对于在清洁操作起始处有弹性的支柱164的初始位置(当缓冲器没有接触壁表面时)。例如,在缓冲器处于中立位置时,缓冲器传感器组件112l和112r的电压信号可以设置成对应于未压缩位置。换言之,这些电压信号可以表示0%的标准化的平均缓冲器程度。如上文所描述的,存储器460可以包括一有效电压的范围(因此,有效校准的范围),其通常可以表示0%的标准化平均缓冲器程度。
[0094]
图5a至图5f示出了机器人100可以沿着房间的壁20执行清洁行为的一示例。在该示例中,壁表面20包括内拐角500,其由壁表面20a和壁面20b的交叉来限定。
[0095]
参照图5a,机器人100接近内拐角500执行壁追踪行为。在壁追踪行为期间,机器人100放置清洁垫使其倚靠壁表面20a,以使清洁垫可以清洁壁20与地板表面10之间的界面(例如,图1的壁-地板界面30)。机器人100可以通过将壁表面20与机器人100的缓冲器110接触来实现与壁表面20的如此接近。接触在一个很小的角度(例如,在大约1度与大约10度之间、大约3度与大约15度之间、大约3度与大约20度之间、大约5度与大约20度之间、大约3度与大约10度之间、大约10度与大约20度之间),以便在壁20与缓冲器110之间保持足够的接触力,并且至少只要力被维持以便继续壁追踪。在该示例中,机器人100将壁表面20a与缓冲器110的右部110r接触,以使清洁垫可以追踪壁-地板界面(例如,图1的壁-地板界面)。当缓
冲器与壁之间的力的大小在缓冲器110部分压缩的所期望的压缩范围内时,用于壁追踪的足够的接触可被检测到。
[0096]
壁追踪期间,机器人100可以将其自身定位成倚靠壁,以便保持缓冲器110处于部分压缩状态,以致平均缓冲器程度是预定间隔(例如,压缩范围或间隔)内,例如,该预定间隔可以是0%至5%、2.5%至7.5%、5%至10%、5%至15%、5%至20%、7.5%至10%、7.5%至12.5%、10%至15%、10%至20%。在某些示例中,在该间隔以上,机器人100可用非常大的力将缓冲器110压靠在壁表面20a上,其可以阻止机器人100的向前运动和/或表示障碍物。在该间隔以下,机器人100可以不压缓冲器110使其足够难的倚靠壁表面20b,以允许清洁垫120到达由地板表面10和壁表面20a所限定的缝隙和拐角。如果控制器405检测到前述间隔以上的力,控制器405可启动操作以移动机器远离壁,并且与壁重新接合(用于进一步的壁追踪)或与壁脱离。如果控制器405检测到前述间隔以下的力,控制器可以启动操以进一步移动机器人与壁接触或开始覆盖图案,例如,辫形和蔓藤图案。
[0097]
参照图5b,在该示例中,机器人100追踪壁表面20a直到其用缓冲器110的前部110f接触到壁面20b。壁表面20b与前部110f接触时,平均缓冲器程度增加超过用于壁追踪的上限阈值的缓冲器程度,这表示机器人100将缓冲器110的前部110f推靠在表面(例如,壁表面20b)上。例如,标准化的平均缓冲器程度的上限阈值可以是7%至8%、7.5%至8%、8%至9%、9%至10%、10%至11%、11%至12%、12至13%、13%至14%、14%至15%、15%至16%、16%至17%、17%至18%、18%至19%、19%至20%。在某些情况下,基于来自电流传感器123和/或编码器的信号,控制器405可确定机器人100的轮子移动慢于预定的速度,因此表示机器人100不再沿壁表面20a前进。机器人100的缓冲器110上的力可以基于与递送至轮子的电流相比的轮子的速度来推算。由递送至轮子的电流分开的轮子的速度成比例于在轮子上的力,所以控制器405可以计算每个轮子上的力。控制器405可基于来自用轮子可操作的编码器的信号来确定轮子的速度,并且基于来自轮子的电流传感器123的信号来确定轮子的电流。随后,控制器405可推算每个轮子上的力,计算所推算的力之间的差值,并且基于差值计算关于机器人质心的转矩。控制器405可以基于转矩计算缓冲器110上的力。在某些实施方式中,存储器460可包括目标力范围(例如,0.1n至0.2n、0.1n至0.3n、0.1n至0.5n、0.5n至1n),当缓冲器110接触竖直取向的表面时,控制器405能够保持目标力范围。
[0098]
在图5c、图5d,以及图5e中,机器人100试图沿壁表面20b重新接合壁追踪行为(例如,在拐角的另一个壁上)。参照图5c,当平均缓冲器程度超过阈值缓冲器程度时,机器人100可以通过停止向前运动和反向驱动机器人100来响应,以致机器人100背离壁表面20b使得缓冲器110不再处于压缩状态。机器人100可以继续向后退直到平均缓冲器程度下降到低于缓冲器程度的下限阈值,例如,下限阈值可以是7.5%至7%、7%至6%、6%至5%,5%至4%、4%至3%、3%至2%、2%至1%、1%至0%、小于0%。一旦平均缓冲器程度减小至低于下限阈值,机器人100可以继续往后退使得缓冲器110距壁表面20b一预定退后距离bd。距离bd可被选择,以致机器人100具有足够的空间来转身并沿着壁表面20b开始壁追踪。在某些情况下,例如,距离bd可以是5mm至10mm、10mm至15mm、15mm至20mm、20mm至25mm、25mm至30mm、30mm至35mm、大约10mm、大约20mm、大于30mm。控制器405可以通过使用由加速度计和/或传感器系统430的轮子编码器输出的信号来推算缓冲器110距壁表面20b的距离并且可以将所推算的距离与距离bd进行比较。
[0099]
参照图5d,在该示例中,机器人100转动离开壁表面20a以使机器人100能够在基本上与壁表面20b平行的方向(例如,在90度拐角的情况下,垂直于先前行进的方向)上定位其向前驱动方向f。参照图5e,随后,机器人100随后重新接合与壁表面20b的壁追踪行为。在该点,机器人100可以继续接合缓冲器110的右部110r与壁表面20b,直到平均缓冲器程度在本文所描述的预定间隔内。机器人100重新接合壁追踪行为之后,现在参照图5f,机器人100通过保持倚靠壁的力继续沿壁表面20b执行壁追踪行为,以使平均缓冲器程度保持在预定间隔内。机器人100可以通过保持缓冲器110的右部110r与壁表面20b的接触来引起缓冲器程度的增加。
[0100]
图6a至图6e示出了机器人100可以执行清洁包括外拐角600的壁20的行为的一示例,外拐角由壁表面20c和壁表面20d的交叉限定。
[0101]
参照图6a,机器人100接近外拐角600执行壁追踪行为。在壁追踪行为期间,机器人100将清洁垫紧密地放置在倚靠壁表面20c,以使清洁垫可清洁地板表面10与壁20之间的界面(例如,图1的壁-地板界面)。机器人100可以通过壁表面20与机器人100的缓冲器110的接触来实现与壁表面20c如此接近,其中壁表面20与缓冲器110之间是切向的或者是很小的角度(例如,大约1度至约大约10度之间、大约3度与大约15度之间、大约3度与大约20度之间、大约5度与大约20度之间、大约3度与大约10度之间、大约10度与大约20度之间)。例如,机器人100将壁表面20c与缓冲器110的右部110r接触,以使清洁垫可以追踪壁-地板界面。壁追踪期间,机器人100可以保持缓冲器110压缩,以致平均缓冲器程度在本文所描述的预定间隔内。在该间隔以上,机器人100用非常大的力将缓冲器110压靠在壁表面20c上,其可以阻止机器人100的向前运动。在该间隔以下,机器人100可以不压缓冲器110使其足够难的倚靠壁表面20d,以允许清洁垫120到达由地板表面10与壁表面20c限定的缝隙和拐角。在某些实施方式中,较小的力阈值可以增加噪声的相对效果,使机器人100更可能不紧密地追踪拐角。
[0102]
参照图6b,在一示例性实施方式中,机器人100追踪壁表面20c,直到检测到平均缓冲器程度不再在预定的间隔内。尤其是,机器人100能够检测到保险杠110已不与壁表面20c接触,并且能够检测到平均缓冲器程度低于下限阈值的缓冲器程度(例如,缓冲器110不再部分压缩)。当缓冲器110的右部110r不与壁标面20c接触时,在该示例中,平均缓冲器程度降低到低于下限阈缓冲器程度,因为壁表面20c与右部110r之间的摩擦力不再压缩缓冲器110。平均缓冲器程度的降低表示机器人100不再壁追踪。例如,缓冲器程度的下限阈值可以是7.5%至7%、7%至6%、6%至5%、5%至4%、4%至3%、34%至2%、2%至1%、1%至0%、小于0%。检测缓冲器110不接触时,机器人100可以停止向前运动。
[0103]
图6c和图6d中,机器人100试图沿壁表面20d重新接合壁追踪行为。参照图6c和图6d,当平均缓冲器程度在下限阈值的缓冲器程度以下时,机器人100可以通过转向最初追踪壁20c的方向来响应并且机器人100慢慢地前进,直到缓冲器110的右部110r接合壁表面20d。在某些实施方式中,在确定平均缓冲器在下限阈值的缓冲器程度以下时,机器人100的控制器405可以发出驱动指令至驱动器410,以使机器人100的轮子逆转方向从而沿向后的方向a移动机器人100。在控制器405基于例如来自轮子的编码器的信号确定机器人100沿向后方向a移动了预定的距离之后,控制器发出驱动指令至驱动410使机器人100的轮子转动机器人100,以致前向驱动方向f基本上平行于壁表面20d。在某些情况下,驱动指令使车轮
转动机器人100,以致前向驱动方向f与壁表面20形成很小的角度(例如,大约1度至大约10度之间、大约3度至大约15度之间、大约3度至大约20度之间、大约5度至大约20度之间、大约3度至大约10度之间、大约10度至大约20度之间)。
[0104]
机器人100与壁表面20d重新接合壁追踪行为之后,现在参照图6e,机器人100通过保持平均缓冲器程度在预定的间隔内来继续执行沿着壁表面20b壁追踪行为。
[0105]
返回图3b,在某些实施方式中,机器人可以通过在门路328侧面的点325a和325b处与壁表面20接合来检测门路328。在点325a和325b处,机器人100接触的壁表面20,以致大约仅缓冲器的前部的一半与壁表面20接触。在某些情况下,缓冲器的前部的大约25%至75%、40%至60%、45%至55%与壁表面20接触。在点325a处,基于由左缓冲器传感器组件112l检测的缓冲器程度以及由右缓冲器传感器组件112r检测的缓冲器程度,机器人100的控制器405可以确定缓冲器110的右部110r已与壁标面20接合并且缓冲器110的左部110l未与壁表面20接合。因此,控制器405可确定壁表面20从右部110r接触壁表面20的位置到左部110l被定位的位置是不连续的。在点325b处,控制器405可确定缓冲器110的左部110l与壁表面20接合并且缓冲器110的右部110r不与壁表面20接合。因此,控制器405可确定壁表面20从左部110l接触壁表面20的位置到右部110r被定位的位置是不连续的。基于在点325a、325b处与缓冲器110的接触,控制器405可以确定诸如门路328的开口存在于点325a、325b之间。控制器405可以计算大约是2d的点325a、325b之间的距离,并确定门路328具有的宽度w小于2d。
[0106]
如图5a、图5f、图6a和图6e所示,机器人100通过保持缓冲器110的右部110r与壁表面20a和20b之间的接触来追踪壁表面20a和20b。在某些实施方式中,机器人100可附加地和/或替代地通过保持缓冲器110的左部110l与壁表面之间的接触来追踪壁表面或竖直取向的表面。接触产生摩擦引起缓冲器110的压缩,在某些实施方式中机器人试图保持该压缩在预定的间隔。在某些实施方式中,清洁垫120可延伸超出缓冲器110,并且清洁垫120和缓冲器110可以配置成使施加在清洁垫120上的力传递至缓冲器110。例如,参照图1g,有弹性的支柱164可机械地连接清洁垫120与缓冲器110。因此,在清洁垫120上的摩擦力可以压缩缓冲器,因此增加平均缓冲器程度。
[0107]
参照图7a至图7d,机器人100可以保持清洁垫120与壁表面20a和20b之间的接触,同时通过追踪壁表面保持缓冲器110与壁表面20a、20b、20c和20d之间的接触,以致向前驱动方向f和壁表面20a、20b、20c和20d形成很小的角度θ(例如,大约1度至大约10度之间、大约3度至大约15度之间、大约3度至大约20度之间、大约5度至大约20度之间、大约3度至大约10度之间、大约10度至大约20度之间)。预定间隔可以在相似的间隔内,如关于图5a、图5f、图6a和图6e所描述的间隔。(例如,0%至5%、2.5%至7.5%、5%至10%、5%至15%、5%至20%、7.5%至10%、7.5%至12.5%、10%至15%、10%至20%)。在某些情况下,预定间隔可以大于关于图5a、图5f、图6a和图6e所描述的情况下使用的预定间隔,以使摩擦的量足以在清洁垫120与壁表面之间。例如,该间隔可以增大0%至1%、1%至2%、2%至3%、3%至4%、4%到5%、大约1%,大约2%,大约3%。为了充分压缩清洁垫120,机器人100可以自身定向以使机器人100的向前驱动方向f与壁表面20a、20b、20c和20d形成很小的角度θ。该角度θ允许向前驱动方向f的一部分将清洁垫120推进壁表面20a、20b、20c和20d,因此,在清洁垫120上产生更大的压缩力并且在缓冲器110上产生更大的摩擦力。
[0108]
参照图8,流程图800示出执行壁追踪行为的一示例方法。
[0109]
在操作805处,机器人的控制器输出控制信号至机器人以追踪壁表面。检测到机器人完成辫形和蔓藤行为之后,控制器可以输出控制信号。机器人可以追踪具有第一表面部分和第二表面部分的壁表面。在第一和第二表面部分可限定拐角,如关于图5a至图5f和图6a至图6e所描述的。在某些实施方式中,控制器被编程以动态校准缓冲器相对于机器人主体的位置。壁追踪之间发生校准,此时机器人不期望与引起机器人的缓冲器压缩的竖直取向的表面或障碍物接触。如果测得的位置不在预定范围内,机器人的控制器可以发出驱动指令,该指令使机器人移动到开口区域,以确保机器人的缓冲器不接触障碍。控制器也可以发出驱动指令来停止机器人的运动,以避免因疏忽导致的缓冲器上的力。该预定范围可以是在制造期间进行的静态校准,如上文所述。控制器输出控制信号以追踪壁表面之前,可能发生动态校准。
[0110]
在操作810处,控制器接收来自机器人上的线性传感器的信号。机器人可以执行壁追踪,以致机器人的缓冲器接触第一壁表面。例如,传感器可以是缓冲器传感器组件112r、112l,如本文所描述的。信号可以是电压、电流、频率、或其它电信号。传感器产生响应于缓冲器相对于机器人的主体的运动的可变信号。该信号的改变响应于缓冲器与壁表面之间的接触,并且信号可以随缓冲器相对于主体的运动线性地变化。控制器可以从机器人上的两个或多个传感器接收两个或多个信号。第一传感器可以响应于缓冲器运动产生第一信号,并且第二传感器可以响应于缓冲器运动产生第二信号。第一和第二信号可以随缓冲器的运动线性地变化。在某些示例中,基于两个线性传感器值的平均值,缓冲器的位置被确定。
[0111]
在操作815处,控制器确定表示机器人上的缓冲器压缩的值x。例如,该值x可以是缓冲器程度。控制器可以基于确定的值x来控制机器人主体的运动。控制器可以基于值x使主体跟踪或追踪壁表面。在机器人具有一个以上的传感器来检测缓冲器的运动的情况下,控制器可以基于来自每个传感器的单独的值计算值x。该值x可以基于来自线性传感器的信号,并且控制器基于值x可以确定缓冲器是否在未压缩位置与部分压缩位置之间的压缩范围内。当控制器基于两个或更多个信号确定值x时,其中两个或更多个信号随机器人与壁表面之间的力的大小线性变化,值x附加地和/或替代地表示机器人接合表面的角度。该角度可以基于表示值x的两个或多个传感器信号。控制器可以基于值x控制机器人接合壁表面的角度。在某些实施方式中,控制器可以控制机器人接合壁表面用的力的大小。
[0112]
在操作820处,如果值x是高于下限值ll并且低于压缩范围的上限值ul,控制器通过发出驱动信号以使机器人继续在向前的驱动方向来输出控制信号以追踪壁表面。该控制信号可以与在操作805处输出的控制信号相同。在某些情况下,控制信号调整机器人的驱动从而保持值x在最佳值中。在某些情况下,值x可以基于来自传感器的信号,并且可以表示缓冲器在未压缩位置和压缩位置之间的压缩范围内。如果值x是平均标准化的缓冲器程度,例如,压缩范围的下限值ll可以是7.5%至7%、7%至6%、6%至5%、5%至4%、4%至3%、34%至2%、2%至1%、1%至0%、小于0%。例如,压缩范围的上限值可以是7%至8%、7.5%至8%、8%至9%、9%至10%、10%至11%、11%至12%、12到13%、13%至14%、14%至15%、15%至16%、16%至17%、17%至18%、18%至19%、19%至20%。最优值可以是下限值ll和上限值ul的平均值。在某些实施方式中,下限值ll可以在大约0%至7.5%之间或更小,并且上限值可以在大约7.5%至15%之间或更大。保持平均缓冲器程度在该预定间隔或
压缩范围内可能在保持机器人的移动性方面是有益的,同时便于清洗由第一壁表面限定的拐角和缝隙。通过保持值x在预定间隔或压缩范围内,控制信号可以使机器人追踪在操作805处机器人追踪的壁表面。所述控制器可被编程以控制机器人主体的运动以跟踪壁表面从而保持值x在压缩范围内。
[0113]
在操作825处,如果x值低于下限值ll或高于压缩范围的上限值ul,控制器输出控制信号以重新接合壁表面。控制器可被编程以控制机器人主体的运动以使机器人主体从响应于压缩范围外的值的壁表面撤回。在某些实施方式中,控制器可以接收来自检测轮子速度的传感器的信号。例如,传感器可以是编码器或与轮子可操作的电流传感器。例如,基于轮子的速度和缓冲器传感器,控制器可控制机器人从壁表面撤回,以转动离开墙表面,随后重新接合壁表面。在值x高于上限值ul的情况下,控制器可执行重新接合行为,如关于上文图5b至图5e所描述的。例如,控制器可以递送控制信号以使机器人即刻停止向前运动,随后从壁表面撤回。控制信号还可以使机器人转动离开壁表面,随后与壁表面重新接合。在值x低于下限值ll的情况下,其可以表示缓冲器与壁表面之间不接触,控制器可以执行重新接合行为,如关于上文图6b至图6d所描述的。控制器可以递送控制信号以使机器人即刻停止向前运动,并且在某些实施方式中,使机器人朝壁表面撤回。随后,控制信号可以使机器人转向壁表面,随后与壁表面重新接合。
[0114]
虽然磁体170l和170r以及传感器176l和176r已描述成是定位的以致缓冲器110的压缩导致由传感器176l和176r产生的电压的增加,在其它实施方式中,磁体和能传感器被定位成当保险杠被压缩时使磁体远离传感器。在这样的实施方式中,在缓冲器压缩时,传感器产生较小的电压。
[0115]
虽然上文所描述的导航行为已相对于执行湿式清洁的机器人100解释,在某些情况下,机器人100可以执行干式清洁并且在清洁操作中可以不合并所有上述航行行为,或合并附加的行为。例如,在没有蔓藤图案的情况下,机器人100可以执行辫形图案。
[0116]
在某些示例中,通过在清洁运行期间存储这些位置在存储于机器人的非短暂性存储器460的地图上或在由穿过有线或无线介质的机器人可进入的外部存储介质上,机器人得知先前已经穿过的表面的位置。在某些实施方式中,机器人包括朝上相机和/或一个或多个测距激光器用于构建空间的该地图。在某些示例中,控制器405使用壁、家具、地板变化以及其它障碍物的地图,以在应用清洁流体之前定位并且使机器人在足够远离障碍和/或地板变化的位置。
[0117]
虽然缓冲器已描述成检测机器人上力的大小,在某些实施方式中,置于机器人上的力传感器、压力传感器,或者某些其它的传感器可以用于感应力。在本文所描述的示例壁追踪技术可以被控制或执行,至少部分地,使用一个或多个计算机程序产品,例如,确实体现在一个或多个信息载体中的一个或多个计算机程序,诸如一个或多个非短暂性机器可读存储介质,用于由诸如可编程处理器、计算机、多个计算机和/或可编程逻辑部件的一个或多个数据处理设备来执行或控制该一个或多个数据处理设备的操作。
[0118]
虽然在上文所描述的某些示例中,完成区域清洁行为之后,壁追踪行为用于清洁房间的周边或的其它空间,在其它示例中,壁追踪行为可用于允许机器人从凌乱的环境或边界区域逃脱。例如,如果机器人进入具有用于入口/出口的狭窄开口的空间,机器人可能会卡在空间中和正常的覆盖图案不与入口/出口对准,以允许机器人逃脱。在这种情况下,
机器人可确定它是在凌乱的环境中和执行壁追踪行为以从该区域逃脱。追踪壁允许机器人识别狭窄出口,否则机器人可能难以定位。在一个特定示例中,机器人可以执行的随机横穿清洁图案,并且在识别机器人重复横穿同一区域(例如,被捕获在小空间或凌乱区域中)时,机器人可以执行壁追踪行为以退出或逃脱该区域。
[0119]
计算机程序可以用任何形式的编程语言编写,包括编译或解释语言,并且其可以以任何形式部署,包括如独立的程序或者如模块、部件、子程序、或适于用在计算环境中的其它单元。
[0120]
与执行本文所描述的所有或部分的壁追踪行为相关联的操作可以由执行一个或多个计算机程序以执行本文描述功能的一个或多个可编程处理器来执行。控制文本所描述的所有或部分的壁追踪行为可以使用诸如fpga(现场可编程门阵列)和/或asic(专用集成电路)的专用逻辑电路来执行。
[0121]
通过示例的方式,适合于执行计算机程序的处理器包括通用和专用微处理器,以及任何类型的数字计算机的任何一个或多个处理器。通常,处理器将接收来自只读存储区域或随机存取存储区域或两者的指令和数据。计算机的元件包括用于执行指令的一个或多个处理器以及用于存储指令和数据的一个或多个存储区域设备。通常,计算机还将包括诸如磁、磁光盘、或光盘的用于存储数据的大量pcbs的一个或多个机器可读的存储介质,或者可操作地耦接成接收来自该一个或多个机器可读的存储介质的数据,或者传输数据至该一个或多个机器可读的存储介质或者全部。适于具体实施计算机程序指令和数据的机器可读存储介质包括所有形式的非易失性存储区域,以示例的方式其包括诸如eprom、eeprom的半导体存储区域设备,以及闪存存储区域设备、诸如内部硬盘或可移动盘的磁盘、磁-光盘,以及cd-rom和dvd-rom盘。
[0122]
本文所描述的不同实施方式的元件可被组合以形成在上述未具体设置的其他实施方式。在不对其操作产生不利影响的情况下,元件可被排除在本文所描述结构之外。此外,各种分离的元件可以被组合到一个或多个单独的元件中以执行本文所描述的功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1