用于航空飞行器的全分布式飞控系统及其操作方法和航空飞行器与流程
[0001]
本发明涉及一种用于航空飞行器的全分布式飞控系统,本发明还涉及一种包括这种全分布式飞控系统的航空飞行器以及一种提供通过所述全分布式飞控系统为航空飞行器提供全分布式飞控的方法。在本发明中使用全分布式布置的现场智能控制器,控制器按功能分为驾驶舱操纵信号控制器、作动器控制器、飞行传感器控制器、数据接口控制器以及系统供电控制器,各个控制器之间采用高速串行总线连网通讯。
背景技术:
[0002]
与一般的飞控系统中采用飞控计算机进行集中式的信号处理和舵面控制指令运算等功能不同,全分布式飞控系统利用高速总线通讯和智能控制器的高数据处理能力,将信号处理、控制律运算、舵面监控等功能分散到各个分布在作动器上的控制器上执行。
[0003]
民用航空飞行器一般通过副翼、升降舵、方向舵、扰流板等活动舵面对航空飞行器进行滚转、俯仰、偏航、减速等操纵,实现飞行控制。
[0004]
现代航空飞行器采用的电传飞控系统,通常通过飞控计算机集中处理驾驶舱操纵指令、航空飞行器位姿传感器信号和作动器反馈信号,根据控制律计算舵面控制指令,通过模拟量指令直接控制舵面作动器并接受传感器反馈,执行指令驱动航空飞行器升降舵、方向舵、副翼、扰流板舵面运动,控制航空飞行器位姿,并与外部系统进行数据交互。空客a320/330/340,波音b777,中国商飞arj21等航空飞行器采用了该类架构
[0005]
控制作动器的模拟信号一般包括作动器电液伺服阀ehsv控制信号、ehsv位移传感器激励和反馈信号、作动筒位移传感器激励和反馈信号、压力传感器激励和反馈信号、模式切换电磁阀控制信号,每个作动器信号线合计约20多根。
[0006]
近年来,飞控系统逐渐开始采用分布式布置在作动器上的远程控制器(reu),远程控制器通过点对点总线实现简单的作动器控制和信号反馈,简化了飞控电子到作动器的控制信号,一般仅需电源线和差分总线合计4根信号线。空客a350/380,波音b787、庞巴迪c系列、中国商飞c919等航空飞行器采用了该类架构。
[0007]
该架构中实现了飞控系统中作动器控制器的局部分布式布局,但仍然依赖飞控电子集中处理驾驶舱操纵指令、航空飞行器位姿传感器信号和作动器反馈信号,控制律和外部系统接口也驻留在飞控电子中,这种算法、控制、监控逻辑、任务调度和通讯集中在相对靠近的少数几个中央飞控电子中,也使得飞控电子软硬件设计高度复杂。
[0008]
随着现代集成电路水平高速发展,微处理器、dsp、fpga等控制芯片数据处理能力大幅提高,电路集成程度显著提升,同时,分布式现场总线技术日益成熟,能够达到高可靠性、高速、高实时性的性能指标,飞控系统具备了进一步向模块化、智能化、全分布式发展的技术基础。
技术实现要素:
[0009]
为了克服现有技术的劣势,本发明提出一种基于现场智能控制器的全分布式飞控系统,主要特点如下:
[0010]
驾驶舱操纵信号、航空飞行器位姿传感器数据、作动器控制和反馈、外部数据接口均采用分布式布置的现场智能控制器处理;
[0011]
不再依赖集中式的飞控电子进行信号处理、控制律算法、控制、监控逻辑、任务调度和通讯功能,将这些功能分配到各个分布式现场智能控制器中执行;
[0012]
各个智能控制器通过全数字式现场总线互联,实现信号数据、系统状态共享,智能控制器按自身任务选择需要的数据作为输入,实现预定任务。
[0013]
本发明提出的飞控系统具备以下优点:
[0014]
将传统的飞控计算机执行的复杂任务分布式分配给现场智能控制器,简化了设备复杂度,系统功能不再依赖单一设备,设备的故障不易扩散影响整个系统;
[0015]
现场智能控制器可以就近分散布置在其需要处理的接口设备附近,最大程度减少接口线缆长度;
[0016]
智能控制器之间通过现场高速总线连接,最大程度减少了控制器件信号传输的线缆长度和数量;
[0017]
系统上每个智能控制器均可通过现场总线获取系统全局数据信息,有利于基于全局信息实现局部智能优化控制,更好的在系统处于不同工况时实现系统重构;
[0018]
现场总线上可扩展新的智能控制器以新增控制、处理对象,增强了系统的复用性、扩展性和可继承性。
[0019]
为此,根据本发明的一个方面,本发明提供了一种用于航空飞行器的全分布式飞控系统,所述全分布式飞控系统包括多个控制链路,其中所述多个控制链路分别包括:
[0020]
驾驶舱操纵信号控制器,所述驾驶舱操纵信号控制器被配置成能够接收驾驶舱操纵信号,将所述驾驶舱操纵信号转换成操纵指令,对所述操纵指令进行编码并打包成操纵指令数据,并将所述操纵指令数据发送到现场总线;
[0021]
多个作动器控制器,所述多个作动器控制器的每个被配置成能够从所述现场总线接收所述驾驶舱操纵信号,将所述驾驶舱操纵信号发送到对应于所述航空飞行器的多个舵面的多个作动器以使其动作,接收所述多个作动器的作动器状态信号,将所述作动器状态信号进行编码并打包成作动器状态数据,并将所述作动器状态数据发送到所述现场总线;
[0022]
飞行传感器控制器,所述飞行传感器控制器被配置成能够接收有关所述航空飞行器飞行的飞行状态数据,并将所述飞行状态数据进行编码并打包发送到所述现场总线;
[0023]
数据接口控制器,所述数据接口控制器被配置成能够接收来自所述现场总线的数据,并与所述航空飞行器的其他系统并且在所述多个控制链路之间数据交互;以及
[0024]
系统供电控制器,所述系统供电控制器被配置成能够为所述航空飞行器的各个部件提供电源;
[0025]
其中,所述驾驶舱操纵信号控制器、所述作动器控制器、所述飞行传感器控制器、所述数据接口控制器和所述系统供电控制器被配置成能够通过所述现场总线彼此通信,由此获取所述全分布式飞控系统及其相关系统的信息,自主进行本地运算/控制和任务的执行,并分别具有独立的核心处理器和独立的监控处理器。
[0026]
根据本发明的优选实施方式,所述驾驶舱操纵信号控制器包括:
[0027]
第一io电路,所述第一io电路被配置成能够转换驾驶舱离散量信号;
[0028]
多个第一模拟电路,所述多个第一模拟电路被配置成能够为多个驾驶舱传感器提供驾驶舱传感器激励信号并从所述多个驾驶舱传感器接收驾驶舱传感器反馈信号;
[0029]
第一总线收发电路,所述第一总线收发电路被配置成能够从所述现场总线接收数据并将数据发送到所述现场总线;
[0030]
第一核心处理器,所述第一核心处理器被配置成能够读取所述驾驶舱离散量信号、所述驾驶舱传感器激励信号和所述驾驶舱传感器反馈信号以构成所述驾驶舱操纵信号,将所述驾驶舱操纵信号转换成所述操纵指令,对所述操纵指令进行编码并打包成所述操纵指令数据,并通过所述第一总线收发电路将所述操纵指令数据发送到所述现场总线;
[0031]
第一监控处理器,所述第一监控处理器被配置成能够将所述多个控制链路中的其他控制链路中的驾驶舱信号控制器读取的数据与本地读取数据进行比较,从而判断驾驶舱数据处理的有效性。
[0032]
根据本发明的优选实施方式,所述多个作动器控制器分别包括:
[0033]
第二io电路,所述第二io电路被配置成能够转换作动器离散量信号;
[0034]
多个第二模拟电路,所述多个第二模拟电路被配置成能够为多个作动器提供激励信号并从所述多个作动器接收反馈信号;
[0035]
第二总线收发电路,所述第二总线收发电路被配置成能够从所述现场总线接收数据并将数据发送到所述现场总线;
[0036]
第二核心处理器,所述第二核心处理器被配置成能够读取所述作动器离散量信号、所述作动器激励信号和所述作动器反馈信号以构成所述作动器状态信号,将所述作动器状态信号进行编码并打包成作动器状态数据,并将所述作动器状态数据发送到所述现场总线;以及
[0037]
第二监控处理器,所述第二监控处理器被配置成能够对所述作动器控制器进行监控,并在检测到故障时切换到旁通模式。
[0038]
根据本发明的优选实施方式,所述飞行传感器控制器包括:
[0039]
多个飞行传感器接口,所述多个飞行传感器接口被配置成能够为所述航空飞行器的多个传感器提供飞行传感器激励信号并从所述航空飞行器的多个传感器接收有关所述航空飞行器飞行的飞行传感器反馈信号;
[0040]
第三总线收发电路,所述第三总线收发电路被配置成能够从所述现场总线接收数据并将数据发送到所述现场总线;
[0041]
第三核心处理器,所述第三核心处理器被配置成能够读取所述飞行传感器激励信号和所述飞行传感器反馈信号以构成所述飞行状态信号,并将所述飞行状态数据进行编码并打包发送到所述现场总线;以及
[0042]
第三监控处理器,所述第三监控处理器被配置成能够将所述多个控制链路中的其他控制链路中的飞行传感器控制器读取的数据与本地读取数据进行比较,从而判断飞行状态数据处理的有效性。
[0043]
根据本发明的优选实施方式,所述数据接口控制器包括:
[0044]
多个航空飞行器系统接口,所述多个航空飞行器系统接口被配置成能够与所述航
空飞行器中的多个操纵系统通信,并从中接收数据;
[0045]
多个第四总线收发电路,所述多个第四总线收发电路被配置成能够与所述多个控制链路相对应,并从所述现场总线接收数据并将数据发送到所述现场总线;
[0046]
第四核心处理器,所述第四核心处理器被配置成能够读取来自所述现场总线和外部系统的数据,并对获得的数据进行重新打包,从而与所述航空飞行器的其他系统并且在所述多个控制链路之间数据交互;以及
[0047]
第四监控处理器,所述第四监控处理器被配置成能够对所述数据接口控制器进行监控。
[0048]
根据本发明的优选实施方式,所述系统供电控制器包括:
[0049]
主电源接口,所述主电源接口被配置成能够与所述航空飞行器的主电源电连接;
[0050]
多个电压输出端,所述多个电压输出端与所述驾驶舱操纵信号控制器、所述多个作动器控制器、所述飞行传感器控制器和所述数据接口控制器电连接从而为其供电;
[0051]
第五总线收发电路,所述第五总线收发电路被配置成能够从所述现场总线接收数据并将数据发送到所述现场总线;
[0052]
第五核心处理器,所述第五核心处理器被配置成能够判断所述驾驶舱操纵信号控制器、所述多个作动器控制器、所述飞行传感器控制器和所述数据接口控制器的状态,并在器出现故障时切断供电;以及
[0053]
第五监控处理器,所述第五监控处理器被配置成能够监控电源转换的供电品质。
[0054]
根据本发明的优选实施方式,所述驾驶舱操纵信号控制器、所述作动器控制器、所述飞行传感器控制器、所述数据接口控制器和所述系统供电控制器被配置成设置在待控制设备附近。
[0055]
根据本发明的优选实施方式,所述驾驶舱操纵信号控制器、所述作动器控制器、所述飞行传感器控制器、所述数据接口控制器和所述系统供电控制器被配置成能够通过所述现场总线获得系统全局数据信息。
[0056]
根据本发明的优选实施方式,所述现场总线被配置成能够扩展新的控制器。
[0057]
根据本发明的另一方面,提供一种航空飞行器,所述航空飞行器包括本发明限定的全分布式飞控系统。
[0058]
根据本发明的再一方面,提供一种通过本发明的全分布式飞控系统为航空飞行器提供全分布式飞控的方法。
附图说明
[0059]
为了更好地理解本发明的上述及其他目的、特征、优点和功能,可以参考附图中所示的优选实施方式。附图中相同的附图标记指代相同的部件。本领域技术人员应该理解,附图旨在示意性地阐明本发明的优选实施方式,对本发明的范围没有任何限制作用,图中各个部件并非按比例绘制。
[0060]
图1是根据本发明的用于航空飞行器的全分布式飞控系统的示意图。
[0061]
图2是根据本发明的用于航空飞行器的全分布式飞控系统的驾驶舱操纵信号控制器的示意图。
[0062]
图3是根据本发明的用于航空飞行器的全分布式飞控系统的作动器控制器的示意
图。
[0063]
图4是根据本发明的用于航空飞行器的全分布式飞控系统的飞行传感器控制器的示意图。
[0064]
图5是根据本发明的用于航空飞行器的全分布式飞控系统的数据接口控制器的示意图。
[0065]
图6是根据本发明的用于航空飞行器的全分布式飞控系统的系统供电控制器的示意图。
具体实施方式
[0066]
现在参考附图,详细描述本发明的具体实施方式。这里所描述的仅仅是根据本发明的优选实施方式,本领域技术人员可以在所述优选实施方式的基础上想到能够实现本发明的其他方式,所述其他方式同样落入本发明的范围。
[0067]
图1示出了根据本发明的一种用于航空飞行器的全分布式飞控系统的实施方式。
[0068]
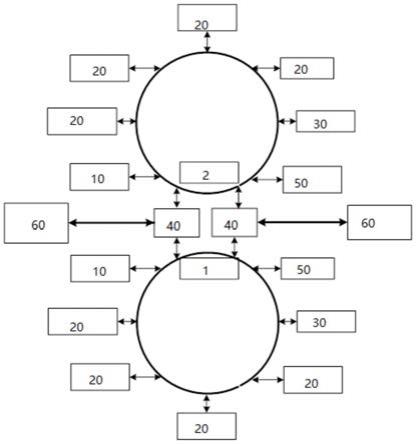
在本发明的全分布式飞控系统中,为综合保障系统的可用性,采用多个控制链路的设计,每个控制链路均具有飞控系统最小控制构型,独立保证航空飞行器操纵能力。每个控制链路通常包含驾驶舱操纵信号控制器、作动器控制器、飞行传感器控制器、数据接口控制器、系统供电控制器,驾驶舱操纵信号控制器、作动器控制器、飞行传感器控制器、数据接口控制器、系统供电控制器被配置成能够通过现场总线彼此通信,由此获取全分布式飞控系统及其相关系统的信息,自主进行本地运算/控制和任务的执行。虽然图1示意地示出了两个控制链路,本发明可适用于多个控制链路。
[0069]
如图1所示,第一控制链路1(图1的下侧圆所示)和第二控制链路2(图1的上侧所示)分别包括驾驶舱操纵信号控制器10、多个作动器控制器20、飞行传感器控制器30、数据接口控制器40、系统供电控制器50,其中驾驶舱操纵信号控制器10、多个作动器控制器20、飞行传感器控制器30、数据接口控制器40、系统供电控制器50与现场总线100彼此连通,并且第一控制链路1通过数据接口控制器40与航空飞行器的其他系统60和第二控制链路2连通。虽然图1示出了四个作动器控制器,实际上作动器控制器的数量与航空飞行器的待控制的舵面的数量相对应。
[0070]
如图1所示,驾驶舱操纵信号控制器10被配置成能够接收驾驶舱操纵信号,将驾驶舱操纵信号转换成操纵指令,对操纵指令进行编码并打包成操纵指令数据,并将操纵指令数据发送到现场总线100。多个作动器控制器20的每个被配置成能够从现场总线100接收驾驶舱操纵信号,将驾驶舱操纵信号发送到对应于航空飞行器的多个舵面的多个作动器以使其动作,接收作动器的作动器状态信号,将作动器状态信号进行编码并打包成作动器状态数据,并将作动器状态数据发送到现场总线100。飞行传感器控制器30被配置成能够接收有关航空飞行器飞行的飞行状态数据,并将飞行状态数据进行编码并打包发送到现场总线100。数据接口控制器40被配置成能够接收来自现场总线100的数据,并与航空飞行器的其他系统并且在多个控制链路之间数据交互。系统供电控制器50被配置成能够为航空飞行器的各个部件提供电源。所述驾驶舱操纵信号控制器10、作动器控制器20、飞行传感器控制器30、数据接口控制器40和系统供电控制器50被配置成能够通过所述现场总线100彼此通信,并分别具有独立的核心处理器和独立的监控处理器。
[0071]
分别具有独立的核心处理器和独立的监控处理器。
[0072]
参考图2,图2根据本发明的用于航空飞行器的全分布式飞控系统的驾驶舱操纵信号控制器的示意图。驾驶舱操纵信号控制器通常为侧杆/驾驶杆盘、脚蹬、减速板手柄及配平开关,驾驶舱操纵信号控制器需对信号进行读取和处理。驾驶舱传感器一般为rvdt或离散开关信号,从系统余度角度考虑,驾驶舱操纵信号发送到多个驾驶舱操纵信号控制器上,防止单个驾驶舱操纵信号控制器失效造成所有控制信号输入丧失。驾驶舱操纵信号控制器10包括第一io电路11(离散量信号转换逻辑电路)、第一模拟电路12(rvdt激励信号和反馈电压模拟量转换电路)、第一总线收发电路13、第一核心处理器14和第一监控处理器15。所述第一io电路11被配置成能够转换驾驶舱离散量信号。第一模拟电路被配置成能够为多个驾驶舱传感器提供驾驶舱传感器激励信号并从所述多个驾驶舱传感器17接收驾驶舱传感器反馈信号。第一总线收发电路13被配置成能够从现场总线100接收数据并将数据发送到述现场总线100,现场总线100上各个控制器均可收到驾驶舱操纵指令数据。第一核心处理器14将驾驶舱操纵信号rvdt和驾驶舱离散量16读取后运算转换为操纵角度指令,第一核心处理器将驾驶舱操纵指令编码打包为操纵指令数据,第一总线收发电路13将操纵指令数据发送到现场总线100上,现场总线100上各个控制器均可收到驾驶舱操纵指令数据;总线收发电路读取驾驶舱操纵指令数据,核心处理器对驾驶舱操纵指令数据进行解码读取。第一监控处理器15被配置成能够将多个控制链路中的其他控制链路中的驾驶舱信号控制器读取的数据与本地读取数据进行比较,从而判断驾驶舱数据处理的有效性。
[0073]
参考图3,图3是根据本发明的用于航空飞行器的全分布式飞控系统的作动器控制器的示意图。在航空飞行器飞行过程中需要通过作动器控制器对舵面作动器进行控制,舵面作动器一般安装在副翼、升降舵、方向舵、扰流板、水平安定面等舵面,通过作动器控制器按照系统指令驱动舵面。为了确保作动器控制的高完整性,控制器具备指令/监控双通道,作动器控制器20主要包括第二io电路21(离散量如sov、刹车使能、电机使能等信号输入输出转换逻辑电路),多个第二模拟电路22(作动器传感器如rvdt、lvdt、液压压力传感器、resolver等的激励信号和反馈电压模拟量转换电路)、第二总线收发电路23、第二核心处理器24和第二监控处理器25。第二io电路21被配置成对电磁阀26进行离散控制。第二模拟电路22被配置成能够为作动器的伺服阀提供伺服阀27控制,并为作动器的位置传感器28和压力传感器29提供激励信号并从位置传感器28和压力传感器29接收反馈信号,并作为输出指令的数模转换电路,如电流、电压信号转换。第二总线收发电路23被配置成能够从所述现场总线100接收数据并将数据发送到所述现场总线100,并能够获取现场总线100上其它控制器传递的数据,同时将数据发送到现场总线100上,现场总线100上各个控制器均可收到作动器状态数据。第二核心处理器24被配置成能够读取作动器离散量信号、作动器激励信号和作动器反馈信号以构成作动器状态信号,将作动器状态信号进行编码并打包成作动器状态数据,并将所述作动器状态数据发送到现场总线100。具体地,第二核心处理器24对总线数据进行解码读取。第二核心处理器24对多余度驾驶舱操纵指令进行表决投票,按表决结果、飞行状态、同舵面其他作动器液压压力和位置等信息进行本地控制律、力纷争均衡运算获得舵面指令位置.第二核心处理器24按系统状态控制作动器模式,根据指令位置、舵面实际位置进行位置闭环运算,得出驱动作动器的信号输出如ehsv电流、电机pwm信号等。第二核心处理器24将作动器状态、舵面位置、液压压力等信号编码打包为作动器状态数据。第二
监控处理器25被配置成能够对所述作动器控制器进行监控。具体地,第二监控处理器25对本地运算结果、作动器故障、控制器电路故障进行监控,并且控制器可通过同一舵面的其他作动器的数据,进行舵面级的监控,如振荡、力纷争、位置完整性;监控到故障时将作动器切换到旁通模式。
[0074]
参考图4,图4是根据本发明的用于航空飞行器的全分布式飞控系统的飞行传感器控制器的示意图。航空飞行器的惯导、姿态、速度、空速、高度等数据通过飞行传感器激励和读取,这些飞行传感器通常分别安装在航空飞行器的各个位置,可通过多个飞行传感器控制器分别安装,每个飞行传感器控制器对附近的多个传感器进行激励和读取反馈。飞行传感器控制器30包括多个飞行传感器接口31(如激励信号和反馈电压模拟量转换电路)、第三总线收发电路32、第三核心处理器33和第三监控处理器34。飞行传感器接口31被配置成能够为所述航空飞行器的位姿传感器提供飞行传感器激励信号并从所述航空飞行器的位姿传感器35接收有关航空飞行器飞行的飞行传感器反馈信号,并且飞行传感器接口31还能够接收大气数据36、无线电高度36a、来自惯导单元37、速率传感器38、迎角传感器39的数据。第三总线收发电路32被配置成能够将数据发送到现场总线100上,现场总线100上各个控制器均可收到飞行状态数据。第三核心处理器33被配置成能够读取所述飞行传感器激励信号和所述飞行传感器反馈信号以构成所述飞行状态信号,并将所述飞行状态数据进行编码并打包发送到所述现场总线100。具体地,第三核心处理器33将传感器信号读取后运算转换为相应的飞行状态数据值。第三核心处理器33将解算的飞行状态数据编码打包为飞行状态数据,现场总线100接收电路读取飞行状态数据,第三核心处理器33对总线数据进行解码读取。第三监控处理器34被配置成能够将多个控制链路中的其他控制链路中的飞行传感器控制器读取的数据与本地读取数据进行比较,从而判断飞行状态数据处理的有效性。
[0075]
参考图5,图5是根据本发明的用于航空飞行器的全分布式飞控系统的数据接口控制器的示意图。数据接口控制器40执行控制链路与航空飞行器其他系统之间、控制链路之间数据交互。数据接口控制器40包括多个航空飞行器系统接口41、多个第四总线收发电路42、第四核心处理器43和第四监控处理器44。多个航空飞行器系统接口被配置成能够与所述航空飞行器中的液压系统45、航电系统46、电源系统47、发动机系统48、起落架系统49等进行通信,并从中接收数据。多个第四总线收发电路42被配置成能够与所述多个控制链路相对应,并从现场总线100接收数据并将数据发送到现场总线100,如arinc664总线。第四核心处理器43被配置成能够读取来自现场总线100和外部系统的数据,并对获得的数据进行重新打包,从而与航空飞行器的其他系统并且在所述多个控制链路之间数据交互。具体地,第四核心处理器43将所有控制链路总线数据、外部系统数据进行解码、汇总、重新打包并传输给所有控制链路,使得不同链路上智能控制器获得的都是飞控相关的全部数据。第四核心处理器43将外部系统所需的飞控系统状态信号打包传输到外部系统接口上。第四核心处理器43具备现场总线100主站功能,对现场总线100和链路上的控制器进行配置管理。第四监控处理器44被配置成能够对数据接口控制器进行监控。
[0076]
参考图6,图6是根据本发明的用于航空飞行器的全分布式飞控系统的系统供电控制器的示意图。系统供电控制器50接受航空飞行器电源70并转换为各个控制器提供28vdc电源。系统供电控制器主要包括主电源接口51、多个电压输出端52、第五总线收发电路53、第五核心处理器54和第五监控处理器55。主电源接口51被配置成能够与所航空飞行器的主
电源电连接,将航空飞行器的主电源转换为飞控分布式链路上控制器所需的28vdc供电。多个电压输出端与驾驶舱操纵信号控制器10、多个作动器控制器20、飞行传感器控制器30和数据接口控制器40电连接从而为其供电。第五总线收发电路53被配置成能够从现场总线100接收数据并将数据发送到现场总线100。第五核心处理器54被配置成能够判断所述驾驶舱操纵信号控制器、所述多个作动器控制器、所述飞行传感器控制器和所述数据接口控制器的状态,并在器出现故障时切断供电,阻止故障扩散。第五监控处理器55被配置成能够监控电源转换的供电品质,从而实现分布式链路上的控制器供电逻辑和时序。
[0077]
驾驶舱操纵信号控制器、作动器控制器、飞行传感器控制器、数据接口控制器和系统供电控制器配置成设置在待控制设备附近,并被配置成能够通过现场总线100获得系统全局数据信息,并且现场总线100被配置成能够扩展新的控制器。
[0078]
根据本发明的进一步方面,本发明还涉及一种用于包括全分布式飞控系统的航空飞行器。
[0079]
根据本发明的再一方面,本发明还涉及一种通过全分布式飞控系统为航空飞行器提供全分布式飞控的方法。
[0080]
现场总线是各个智能控制器之间传递状态信息的载体,采用全双工差分信号,总线采用曼彻斯特编码,每个控制器的设备类型和安装位置标识具有唯一的总线数据头,总线具有crc校验保证数据完整性。为防止单一现场总线发生共模故障,不同控制链路采用不同的现场总线配置。
[0081]
本发明的优点在于:
[0082]
系统启动:航空飞行器上电时,供电模块上电并直接给数据总集接口控制器供电,数据总集接口控制器与航空飞行器其它系统、供电模块控制器进行总线通讯,根据飞行状态指令供电模块给驾驶舱信号控制器、作动器控制器、飞行传感器控制器供电并建立通讯;
[0083]
正常工作:系统进入正常工作状态时,驾驶舱信号控制器将操纵指令传输到总线,飞行传感器信号控制器将航空飞行器相关状态信号传输到总线,数据总集接口控制器将飞行状态和其它链路的状态信息汇总后传输到总线,作动器控制器对多余度驾驶舱操纵指令进行表决投票,按表决结果、飞行状态、同舵面其他作动器液压压力和位置等信息进行本地控制律、力纷争均衡运算获得舵面指令位置,并进行位置闭环运算驱动作动器运动;
[0084]
故障监控:各个控制器进行本地故障监控,并结合关联信号进行系统级监控,当发现故障后,对本地故障进行处置并上报故障状态,供电模块控制器对于出现完整性问题的控制器进行断电处置;
[0085]
维护:数据总集接口控制器接受维护指令,将维护指令传输到总线,各个控制器根据飞行状态和关联信号进行维护测试。
[0086]
本发明的多种实施方式的以上描述出于描述的目的提供给相关领域的一个普通技术人员。不意图将本发明排他或局限于单个公开的实施方式。如上所述,以上教导的领域中的普通技术人员将明白本发明的多种替代和变型。因此,虽然具体描述了一些替代实施方式,本领域普通技术人员将明白或相对容易地开发其他实施方式。本发明旨在包括这里描述的本发明的所有替代、改型和变型,以及落入以上描述的本发明的精神和范围内的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1