AGV导航控制系统及方法与流程
agv导航控制系统及方法
技术领域
[0001]
本发明涉及agv技术领域,尤其涉及agv的导航控制系统及方法。
背景技术:
[0002]
当前agv要能够导航,需要在agv上安装许多导航传感器以及核心控制器,大大抬高了agv的造价,也就提高了agv用户的成本。
技术实现要素:
[0003]
鉴于目前现有技术的不足,本发明的目的在于提供一种低成本的agv导航控制系统及方法。
[0004]
为达到上述目的,本发明的实施例采用如下技术方案:一种agv导航控制系统,所述控制系统包括:n个agv,在一厂房限定的区域内运行;m个工业相机,安装于所述厂房的上方,对厂房内agv的运行情况进行拍照;中央控制服务器,与所述m个工业相机相连,接收所述m个工业相机拍摄的实时图像,进行视觉识别,识别出各agv,对各agv进行导航控制。
[0005]
进一步,所述各agv和所述中央控制服务器均设有无线通讯模块以进行无线通讯。
[0006]
进一步,所述各agv上设有里程计以获取各agv的里程信息,所述里程信息通过所述无线通讯模块发送给所述中央控制服务器。
[0007]
进一步,所述各agv顶部设有图形编码,所述中央控制服务器通过所述图形编码对各agv进行编号。
[0008]
进一步,所述各agv前部设有安全防撞传感器。
[0009]
一种agv导航控制方法,所述控制方法包括:配置n个agv,在一厂房限定的区域内运行;配置m个工业相机,安装于所述厂房的上方,对厂房内agv的运行情况进行拍照;配置中央控制服务器,与所述m个工业相机相连,接收所述m个工业相机拍摄的实时图像,进行视觉识别,识别出各agv,对各agv进行导航控制。
[0010]
进一步,所述中央控制服务器进行视觉识别包括:识别出各agv的实时位置和实时速度以及障碍物;所述中央控制服务器对各agv进行导航控制包括:执行闭环控制算法以及避障算法,计算出各agv运动设定速度发送给各agv的驱动器。
[0011]
进一步,所述中央控制服务器进行图像识别和导航控制的频率为每1-20毫秒刷新一次。
[0012]
进一步,所述中央控制服务器进行图像识别和导航控制的频率为每20毫秒刷新一次。
[0013]
进一步,所述工业相机安装完成后,对各工业相机的位置坐标进行测绘标定,以使各工业相机的坐标系统一。
[0014]
本发明所述agv导航控制系统及方法,通过工业相机对agv的运行情况进行实时拍照,然后传送给中央控制服务器进行视觉识别,识别出各agv的实时位置和实时速度以及障碍物,然后执行闭环控制算法以及避障算法,计算出各agv运动设定速度发送给各agv的驱动器,以对各agv进行导航控制。省掉了现有agv上的一些周边传感器,比如载货传感器、侧边防撞传感器、导航传感器等,agv上也不需要安装核心控制器。如此大大降低了agv的造价,减少了agv用户的成本。
附图说明
[0015]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0016]
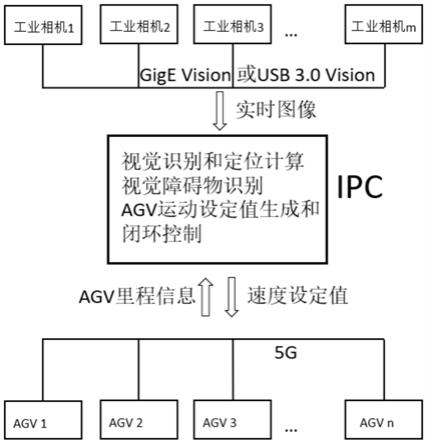
图1为本发明一实施方式一种agv导航控制系统的结构示意图。
具体实施方式
[0017]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0018]
请参见图1所示,为本发明一实施方式一种agv导航控制系统的结构示意图。所述agv导航控制系统包括:n个agv,在一厂房限定的区域内运行;m个工业相机,安装于所述厂房的上方,对厂房内agv的运行情况进行拍照;中央控制服务器(ipc),与所述m个工业相机相连,接收所述m个工业相机拍摄的实时图像,进行视觉识别,识别出各agv,对各agv进行导航控制。
[0019]
其中,所述厂房是agv用户根据自己的实际业务量需要进行设定。当所述厂房的大小确定之后,就可以确定所需要的工业相机的数量。工业相机的数量能满足把厂房内所有区域均能清楚拍摄到就好。而agv的数量则同时要考虑厂房的大小以及业务量货物吞吐量的大小。所以所述n和m均可以实际情况进行灵活设定,本发明对此不作限定。所述中央控制服务器与所述工业相机之间通过gige vision协议或usb 3.0 vision协议或其他相机协议接口进行通讯。而所述工业相机可采用红外相机,如此可以用于夜间或光线不好的场合。
[0020]
进一步,所述各agv和所述中央控制服务器均设有无线通讯模块以进行无线通讯,比如agv从中央控制服务器接受导航指令。所述无线通讯模块可以是5g模块。
[0021]
所述各agv上设有里程计以获取各agv的里程信息,所述里程信息通过即所述无线通讯模块发送给所述中央控制服务器以配合进行导航计算。
[0022]
而所述各agv顶部均设有图形编码,所述中央控制服务器通过所述图形编码对各agv进行编号。
[0023]
另外,所述各agv前部设有安全防撞传感器,以确保不会发生碰撞事故,满足安全级别要求。
[0024]
本发明所提供一种agv导航控制方法包括:
配置n个agv,在一厂房限定的区域内运行;配置m个工业相机,安装于所述厂房的上方,对厂房内agv的运行情况进行拍照;配置中央控制服务器,与所述m个工业相机相连,接收所述m个工业相机拍摄的实时图像,进行视觉识别,识别出各agv,对各agv进行导航控制。
[0025]
其中,所述中央控制服务器进行视觉识别包括:识别出各agv的实时位置和实时速度以及障碍物;所述中央控制服务器对各agv进行导航控制包括:执行闭环控制算法以及避障算法,计算出各agv运动设定速度发送给各agv的驱动器。
[0026]
为满足对各agv进行实时导航的需要,所述中央控制服务器运算能力较高,较佳的,进行图像识别和导航控制的频率为每1-20毫秒刷新一次。在一具体实施例中,所述中央控制服务器进行图像识别和导航控制的频率为每20毫秒刷新一次。
[0027]
需要说明的是,所述工业相机安装完成后,对各工业相机的位置坐标进行测绘标定,以使各工业相机的坐标系统一。
[0028]
本发明所述agv导航控制系统及方法,通过工业相机对agv的运行情况进行实时拍照,然后传送给中央控制服务器进行视觉识别,识别出各agv的实时位置和实时速度以及障碍物,然后执行闭环控制算法以及避障算法,计算出各agv运动设定速度发送给各agv的驱动器,以对各agv进行导航控制。省掉了现有agv上的一些周边传感器,比如载货传感器、侧边防撞传感器、导航传感器等,agv上也不需要安装核心控制器。如此大大降低了agv的造价,减少了agv用户的成本。
[0029]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本领域技术的技术人员在本发明公开的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1