控制受限卫星编队飞行系统的时变反馈有限时间控制方法与流程
[0001]
本发明涉及控制受限卫星编队飞行系统的时变反馈有限时间控制方法。
背景技术:
[0002]
卫星编队飞行实质上是利用多个飞行中的卫星组成一定形状的系统,各颗卫星之间通 过星间通信相互联系、协同工作,共同承担空间信号的采集与处理等任务。卫星伴飞作为 一种主要的卫星编队飞行构型受到了包括美国国家航空航天局、美国空军和欧空局在内的 多家著名航空航天研究机构的广泛关注。卫星伴飞系统由目标卫星和伴飞卫星构成,其中 伴飞卫星以指定的轨迹围绕目标卫星做相对运动。从目前来看,伴飞卫星的主要作用是对 主卫星进行观测并辅助其完成相关任务。
[0003]
卫星伴飞系统的控制问题可以转化为跟踪控制问题。传统的跟踪控制算法大多能够实 现闭环系统渐近跟踪,即系统状态在时间趋于无穷时才能完成对轨迹的跟踪任务。然而传 统的跟踪控制算法并不能满足一些特殊的任务需求,即有限时间跟踪控制任务。有限时间 控制器实现了闭环系统能在有限时间内收敛到期望状态的需求,另一方面,受执行机构推 力的限制,伴飞卫星只能提供有限的加速度,如果在进行控制器的设计中不考虑此问题, 理论计算需要的产生的加速度可能会大于推力器实际能产生的加速度,轻者影响控制效果, 重者甚至会导致系统不稳定。因此,针对控制受限卫星伴飞系统设计有限时间跟踪控制算 法具有重要的理论与工程意义。
[0004]
目前,传统卫星伴飞系统的有限时间控制大都采用了非光滑反馈控制方法,例如滑模 控制算法等。然而该方法会带来抖振、控制器输入幅值较大等缺点。
技术实现要素:
[0005]
本发明为实现控制受限情形下的卫星编队飞行任务,而提供了一种基于光滑时变反馈 的控制受限卫星编队飞行系统的时变反馈有限时间控制方法。
[0006]
控制受限卫星编队飞行系统的时变反馈有限时间控制方法,它包括:
[0007]
步骤一:建立控制受限卫星编队飞行系统的轨道动力学模型并得到状态空间方程,建 立待跟踪信号模型并得到状态空间方程;
[0008]
步骤二:建立参量lyapunov方程并分析其性质,通过参量lyapunov方程的正定解 p(γ),设计显式的线性时变反馈控制律,然后建立输出调节方程,通过输出调节方程的 解,设计显式的线性时变前馈控制律,最后通过线性时变反馈控制律和线性时变前馈控制 律设计控制受限卫星编队飞行系统的时变状态控制器;
[0009]
步骤三:通过构造显式的lyapunov函数,利用参量lyapunov方程和调节方程解的性 质设计控制器参数,保证伴飞卫星在有限时间内完成跟踪控制任务。
[0010]
本发明相比现有技术的有益效果是:
[0011]
控制受限卫星编队飞行系统的时变反馈有限时间控制方法,本发明所提出的方法最显 著的优点是,针对控制受限情形下的卫星编队飞行系统,设计者通过参量lyapunov方
程 的正定解和调节方程的唯一解,设计显式的时变状态控制律,通过构造显式的lyapunov函数,保证卫星伴飞系统在有限时间内完成伴飞任务。
[0012]
通过求解步骤二的参量lyapunov方程和调节方程,得到控制受限情形下的显式时变 有限时间跟踪控制控制律,并且仿真结果说明:基于时变反馈控制律的闭环系统在有限时 间内实现跟踪控制任务,即伴飞卫星在有限时间内完成对给定轨迹的跟踪。
[0013]
下面结合附图和实施方式对本发明作进一步地说明:
附图说明
[0014]
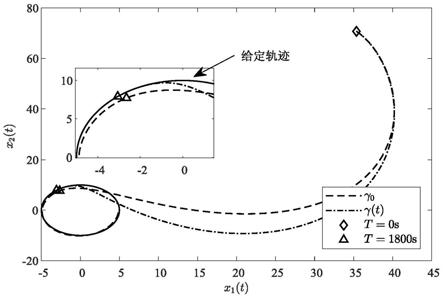
图1是不同γ(t)情况下伴飞卫星的轨迹曲线;
[0015]
图2是所设计的控制器中控制信号的变化曲线。
具体实施方式
[0016]
具体实施方式一:控制受限航天器交会控制系统的时变反馈有限时间镇定方法,它按 以下步骤实现:
[0017]
步骤一:建立控制受限卫星编队飞行系统的轨道动力学模型并得到状态空间方程,建 立待跟踪信号模型并得到状态空间方程;
[0018]
步骤二:建立参量lyapunov方程并分析其性质,通过参量lyapunov方程的正定解 p(γ),设计显式的线性时变反馈控制律,然后建立输出调节方程,通过输出调节方程的 解,设计显式的线性时变前馈控制律,最后通过线性时变反馈控制律和线性时变前馈控制 律设计控制受限卫星编队飞行系统的时变状态控制器;
[0019]
步骤三:通过构造显式的lyapunov函数,利用参量lyapunov方程和调节方程解的性 质设计控制器参数,保证伴飞卫星在有限时间内完成跟踪任务。
[0020]
本发明所涉及的领域为卫星编队飞行系统,所对应的控制问题为给定信号的跟踪问题, 即当给定信号为零时,所设计的控制器可以使得系统稳定,当给定信号不为零时,所设计 的控制器使得伴飞卫星能跟踪给定信号。简而言之,反馈控制律的意义在于使得闭环系统 稳定,前馈控制律的意义在于使得系统的输出信号可以跟踪给定的信号。
[0021]
具体实施方式二:本实施方式与具体实施方式一不同的是:步骤一具体为:建立卫 星编队飞行系统的数学模型:考虑目标卫星运行在平面圆轨道上的情形,其中r
e
是地球 的轨道半径,r
ref
是目标卫星的轨道半径,i
ref
是目标卫星参考轨道的初始倾角,j2是地球 位势的二次球谐函数中的位势常数,θ是目标卫星和追赶卫星之间的相角,(x1,x2)是坐标 原点在目标卫星质心上右手坐标系的坐标,是由于空气动力阻力而产生的在 方向(x1,x2)上的附加加速度,m是星体的质量,g是引力常数,μ=gm是引力参数, 是目标卫星的轨道速率,目标卫星和伴飞卫星的在平面内的非线性相对运 动方程为:
[0022][0023]
其中定义定义r
rel
为目标卫星和追赶卫星的相对距离,
lyapunov方程存在唯一正定解p(γ);且p(γ)具有以下性质:
[0039]
·
性质1:π(γ)=tr(b
t
pb)=2tr(a)+nγ,其中n为系统(2)的阶数,tr(b
t
pb)表 示矩阵b
t
pb的迹,tr(a)表示矩阵a的迹。由于系统(2)中矩阵a的特征值全在 虚轴上,因此,tr(a)=0,π(γ)=tr(b
t
pb)=nv>0;
[0040]
·
性质2:满足且与p(γ)的关系为:与p(γ)的关系为:
[0041]
步骤2.2:构建基于式(5)时变反馈增益:
[0042]
k(γ)=b
t
p(γ)
ꢀꢀꢀ
(6)
[0043]
步骤2.3:构建调节方程:
[0044][0045]
其中,π和γ即为调节方程(7)的解;
[0046]
步骤2.4:构建基于式(6)和(7)的线性时变前馈增益:
[0047]
l(γ)=γ+k(γ)π
ꢀꢀꢀ
(8)
[0048]
步骤2.5:构建物理可实现的时变控制器:
[0049]
首先基于式(6)和(8)构建时变控制器:
[0050]
u(t)=-k(γ)x(t)+l(γ)w(t)
ꢀꢀꢀ
(9)
[0051]
可见,本发明构建物理可实现的时变控制器不仅包括反馈控制信号(即-k(γ)x(t)), 还包括前馈控制信号l(γ)w(t),其目的就是使得闭环系统的输出可以跟踪给定的信号。
[0052]
其中反馈增益k(γ)由参量lyapunov方程的正定解得到,即k(γ)=b
t
p(γ),其中p(γ)为 lyapunov方程的唯一正定解;前馈增益l(γ)由反馈增益和调节方程的唯一解构造,即 l(γ)=γ+k(γ)π。
[0053]
则闭环控制系统(2)、(3)、4)和(9)可表示为:
[0054][0055]
观察t∈[0,t1)可得:当时间t趋于t1,γ趋于正无穷;观察性质2可得:γ趋 于正无穷,则p(γ)趋于正无穷;观察式(6)可得:p(γ)趋于正无穷,则k(γ)趋于无穷。 观察式(8)可得:k(γ)趋于正无穷,则l(γ)趋于无穷。因此基于式(6)和(8)的时变 控制器(9)是物理不可实现的。此外,γ在时间区域t∈[t1,+∞)内没有被定义,导致时 变控制器(9)在时间区域t∈[t1,+∞)内没有被定义;为了设计物理可实现的时变控制器, 给出一种γ的设计方法;
[0056][0057]
其中是被待设计的参数。
[0058]
具体实施方式五:本实施方式与具体实施方式一不同的是:步骤三具体为:
[0059]
步骤3.1:为了方便分析,做以下的状态变换:定义χ(t)=x(t)-πw(t),利用调节方 程(7),闭环系统(10)可重新写为
[0060][0061]
观察闭环系统(12)可知:χ(t)趋于零,则e(t)趋于零。对比闭环系统(10)和(12)可 知,通过线性变换χ(t)=x(t)-πw(t),跟踪控制问题转化为扰动情况下的镇定问题。为 方便起见,以闭环系统(12)为对象进行稳定性分析。
[0062]
步骤3.2:为了实现控制受限卫星编队飞行系统的时变反馈有限时间控制,需要对外 部系统(3)做以下要求:存在一个集合ω和一个常数使得对于所有的w(0)∈ω,
[0063][0064]
其中w(0)为w(t)在t=0时刻的值,||γw(t)||
∞
为fw(t)的无穷范数。
[0065]
步骤3.3:|u
i
(t)|≤u
max
,i=1,2情形下闭环系统lyapunov稳定性检验
[0066]
定义χ=χ(t),定义以下凸包:
[0067][0068]
定义以下lyapunov函数:
[0069]
v(t,χ)=π(γ)χ
t
p(γ)χ
ꢀꢀꢀ
(15)
[0070]
由性质1可知v(t,χ)≥0,当χ∈ξ(γ)时,利用性质1可得:
[0071][0072]
其中b
i
表示为矩阵b的第i列。由式(16)可知
[0073][0074]
其中||b
t
pχ||∞为b
t
pχ的无穷范数。由式(13)和(17)可知
[0075][0076]
因此闭环系统(12)可写为
[0077][0078]
lyapunov函数v(t,χ)沿着闭环系统(19)的时间导数为:
[0079][0080]
由可得因此,利用性质2可得式(20)可 继续写为:
[0081][0082]
由可得因此,式(21)可继续写为
[0083][0084]
由式(22)可得:
[0085][0086]
式(23)表明:对于任意的χ(0)∈ξ(γ0),可得其中,χ(0) 为状态χ(t)在t=0时刻的值;
[0087]
步骤3.4:|u
i
(t)|≤u
max
,i=1,2情形下闭环系统状态收敛速度检验
[0088]
由式(22)可得:
[0089]
v(t,χ)≤e
φ
v(t(0),χ(0))
ꢀꢀꢀ
(24)
[0090]
其中v(t(0),χ(0))为函数v(t,χ)在t=0时刻的值,因此,式 (24)可继续写为
[0091][0092]
其中p(γ0)为γ(t)在t=0时刻参量lyapunov方程(5)的解,λ
max
(p(γ0))为p(γ0) 的最大特征值,π(γ0)为π(γ)在t=0时刻的值,||χ(0)||为χ(0)的范数。
[0093]
观察式(15)可得
[0094]
v(t,χ)≥λ
min
(p(γ0))π(γ0)||χ(t)||2ꢀꢀꢀ
(26)
[0095]
其中λ
min
(p(γ0))为p(γ0)的最小特征值,||χ(t)||为χ(t)的范数。因此,由式(25)和(26) 可得
[0096][0097]
式(27)表明:当时间t趋于t1时,χ(t)趋于零,即e(t)趋于零。即卫星编队飞行系统跟踪 任务在有限时间t内完成。
[0098]
步骤3.5:参数γ0和α3的设计方法
[0099]
由可知有限时间t1依赖于参数γ0,并且满足
[0100][0101]
由式(28)可知γ0越小有限时间t1越长。另一方面,根据性质2和式(14)可知γ0越 小,吸引域ξ(γ0)越大。故当u
max
固定时,参数γ0的设计需要在吸引域和有限时间t1做 一下权衡。
[0102]
在另一方面,由可知有限时间t1还依赖于参数α3,并且满足
[0103][0104]
由式(29)可知当α3越小有限时间t1越短,并且当α3趋于零时,t1趋于当α3越 大有限时间t1越长,并且当α3趋于α2时,t1趋于无穷大。因此可根据控制任务在[0,α2)之 间调节α3,使得有限时间t1在内被合适的选取。其它步骤及参数与具体实施方 式一至四之一相同。
[0105]
实施例
[0106]
直接针对原始非线性方程(1)进行仿真。卫星编队飞行的相关技术参数如下表:
[0107][0108]
伴飞卫星需要跟踪的轨迹参数如下:r=10,w
ref
=n。
[0109]
因此,可直接||γw(t)||
∞
≤6.5
×
10-5
。
[0110]
假设u
max
=6
×
10-4
。在仿真中,选择初始状态为通过求解方程 π(γ0)χ
t
(0)p(γ0)χ(0)=(6
×
10-4-6.5
×
10-5
)2可得到γ0=0.0058,在仿真中选择 δ
c
(γ0)=32。
[0111]
考虑两种不同的案例,案例一:选取γ(t)=γ0,t≥0,构建线性定常控制器;案例二: 通过步骤二选取γ(t)并且选择a3=0.0153,构建时变控制器。图1给出了两种案 例的伴飞卫星的轨迹曲线,图2给出了第二种案例的输入信号的变化曲线。从图1可以看 出基于时变控制律的闭环系统在有限时间t1内跟踪上给定的轨迹曲线,而基于定常控制律 的闭环系统无法在有限时间t1内跟踪上给定的轨迹曲线。从图1可以看出在收敛阶段,所 设计的时变控制律始终没有发生饱和现象,即||u(t)||
∞
≤u
max
。
[0112]
本发明已以较佳实施案例揭示如上,然而并非用以限定本发明,任何熟悉本专业的技 术人员,在不脱离本发明技术方案范围内,当可以利用上述揭示的结构及技术内容做出些 许的更动或修饰为等同变化的等效实施案例,均仍属本发明技术方案范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1