一种基于多维传感的公路隧道智能化巡检机器人系统的制作方法
1.本发明涉及公路隧道巡检设备,具体的说是一种基于多维传感的公路隧道智能化巡检机器人系统。
背景技术:
2.隧道在现代化公路交通运输发展中起着不可替代的作用。随着经济的迅速发展和公路交通建设规模的日益扩大,新的勘察设计理念逐渐成熟,施工技术不断进步,我国公路隧道建设得到迅速发展。截至2018年末,我国公路隧道达17738处,共计1724万米。
3.隧道具有长管形状空间,其空间有限、结构封闭、视线差等,一旦发生事故,造成救援工作既困难又复杂,会造成较严重的交通阻塞,且有可能引发火灾,从而造成灾难性的后果。隧道事故主要特征表现为复杂多样、危害程度大、事后处理困难、容易诱发二次交通事故,事故死亡率高,其后果严重,社会影响大。因此,保证隧道行车安全至关重要。
4.由于隧道的环境特殊,隧道的安全性以及隧道管理的稳定性是隧道运营状况最重要的考核指标,因此隧道对通风、照明、交通控制等监控系统的要求非常高。利用现代化的控制理论和先进的监控设备,建立一套完整的隧道监控系统,隧道监控系统具有监视、控制、报警、诱导和决策等作用,使隧道运营管理者能够及时了解隧道内的情况,在遇到异常情况时能够采取相应的措施,将事故造成的损失降至最低程度。此外,隧道监控系统通过采用先进的电子技术,采集各种交通数据,通过计算机软件对信息进行处理分析,形成控制策略,及时发布各种控制命令、交通信息,处理各种交通事故,疏导交通流,及时向车辆提供安全服务信息,防患事故于未然,对于提高隧道行车的安全性、快速性和舒适性尤为重要。
5.现有公路隧道按照《公路隧道设计规范第二册交通工程与附属设施》(jtgd70/2
‑
2014)对公路隧道交通工程与附属设施进行配置,一般包含:
6.一、监控设施:摄像机、视频事件检测器、车道指示器、洞内可变信息标志、本地控制器、紧急电话、有线广播、一氧化碳能见度检测器、风速风向检测器、亮度检测器、手动报警按钮等设备,火灾检测设置点型火焰探测器、线型感温火灾探测器、图像型火灾探测器,沿洞顶敷设感温光纤,探测隧道内温度变化,并将信息传回监控中心。
7.二、消防设施:室内外消火栓、固定式水成膜泡沫灭火器、手推车灭火器。同时在洞口设置取水井、蓄水池、高位水池等。
8.三、通风设施:自然通风或射流风机等通风设施。
9.四、照明设施:隧道照明及隧道车行横洞、人行横洞照明设施。
10.五、供配电设施:照明配电箱和隧道内埋地式变压器。
11.六、交通安全设施:紧急停车带标志、行人横洞指示标志、行车横洞指示标志、疏散指示标志、紧急电话指示标志、消防设备指示标志等电光标志;隧道出口预告标志、紧急停车带位置提示标志、公告信息标志、指路标志、线形诱导标志等反光标志,以及标线、轮廓标等。
12.高速公路的机电设备养护在高速公路日常运营管理中起着举足轻重的作用,关系
到全线公路的网络稳定连接、高速公路的畅通无阻等。公路隧道运维与救援是隧道管理的重要组成部分,是隧道运营实现制度化、规范化、科学化的重要手段。因此,必须对隧道的设备进行日常的检测、养护,防患于未然,保证高速公路机电设备的正常运行。但是隧道内设备分布广,种类、数量多,组成复杂。长期以来,人们对于隧道的运行维护一直以人工为主。但是公路隧道人工巡检面临着许多挑战:
13.其一、人工巡检标准不统一:
14.人工巡检工作量大,不能保证在每次巡检工作中检查并记录所有库存情况和设备状态。
15.不同工作人员由于职业素质与经验能力的不同,得出的巡检结果存在一定的偏差。
16.其二、人工巡检周期较长:
17.人工巡检无法做到全天候持续巡检,事件发现周期长,如遇到异常情况无法及时处理,对于现场情况的处理具有一定的滞后性。
18.其三、人工巡检潜在安全隐患:
19.人工巡检过程中对巡检人员本身具有一定的安全隐患,遇到突发事件可能威胁人身安全。
20.其四、隧道火灾工况下人工巡检失效:
21.公路隧道发生火灾时,共有的特点及危害包括:第一,热量难以散出,对隧道衬砌结构威胁极大;第二,成灾时间短,火灾容易快速蔓延,相邻车辆被引燃,易发生二次火灾;第三,产生的有毒热烟气快速蔓延,隧道环境迅速恶化;第四,隧道被困人员应迅速得到救援及疏散,大量隧道火灾事故表明,有毒热烟气易造成烟气窒息、中毒等,严重影响人员疏散。
22.公路隧道发生火灾时,人工巡检无法进入火灾发生点,且隧道监控设施在火灾初期就可能大量失效,严重影响隧道运营单位执行火灾工况下救援及消防方案、风机排烟方案,严重影响通知火灾上游车辆避免进入隧道火点等交通管控方案。
技术实现要素:
23.本发明所要解决的技术问题是:提供一种基于多维传感的公路隧道智能化巡检机器人系统。
24.解决上述技术问题,本发明所采用的技术方案如下:
25.一种基于多维传感的公路隧道智能化巡检机器人系统,其特征在于,包括:
26.移动机器人子系统,能够带动多维传感子系统在被巡检隧道中移动;
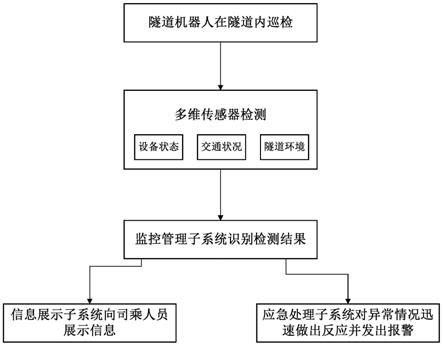
27.多维传感子系统,能够检测获得所述被巡检隧道的设备状态数据、隧道环境数据、交通状况数据;
28.监控管理子系统,能够实时接收所述设备状态数据、隧道环境数据、交通状况数据,并能够基于所述设备状态数据、隧道环境数据、交通状况数据中的一种或多种数据分析出所述被巡检隧道存在的设备故障情况、隧道环境异常情况、交通事故情况。
29.从而,本发明能够代替人工完成公路隧道的相关运维巡检工作,以及时发现异常情况,具有巡检检测数据可靠性高、规范性好、巡检效率高、人工劳动强度低的优点。
30.作为本发明的优选实施方式:所述移动机器人子系统包括运行轨道和巡检机器人,所述运行轨道安装在所述被巡检隧道的顶部并沿所述被巡检隧道的走向延伸,所述巡检机器人包括轨道载具、升降云台和安装机体,所述轨道载具安装于所述运行轨道并能够沿所述运行轨道前后运行,所述安装机体通过所述升降云台安装于所述轨道载具,所述升降云台能够带动所述安装机体升降运动;
31.并且,所述多维传感子系统安装在所述安装机体上,且所述安装机体上还安装有控制模组、定位模组、通讯模组和用于为巡检机器人供电的电源模组,所述控制模组分别与所述轨道载具和升降云台的控制端电性连接,所述控制模组能够通过所述通讯模组接收来自所述监控管理子系统的控制指令,且所述控制模组能够将所述定位模组输出的定位数据以及所述多维传感子系统检测到的设备状态数据、隧道环境数据、交通状况数据通过所述通讯模组实时发送给所述监控管理子系统;
32.所述巡检机器人能够工作在自主巡检模式和遥控巡检模式:
33.在所述自主巡检模式下,所述巡检机器人由所述控制模组独立控制,按照预设的巡检时间移动至预设的巡检工作点,通过所述多维传感子系统在该巡检工作点处以及移动过程中进行相应数据(即相应的设备状态数据、隧道环境数据、交通状况数据)的检测,并将检测到的数据实时发送给所述监控管理子系统,其中,所述巡检工作点包含所述轨道载具在运行轨道上的位置和所述升降云台对安装机体的升降高度,前者由所述定位模组进行定位;从而,在该模式下,巡检机器人每到一个巡检工作点时能自动准确停车检测,做完规定的检测动作后再按照预先设定好的路径自动向下一个巡检工作点前进,由此,能够在公路隧道的例行巡检中,实现包括全天巡检、定时巡检、定点巡检和定任务巡检等多种巡检方式。
34.在所述遥控巡检模式下,所述巡检机器人接收来自所述监控管理子系统的控制指令,按照该控制指令移动至相应的巡检工作点,通过所述多维传感子系统在该巡检工作点处以及移动过程中进行相应数据的检测,并将检测到的数据实时发送给所述监控管理子系统;从而,在该模式下,隧道运维人员可以通过监控管理子系统以遥控的方式,控制巡检机器人对被巡检隧道中的任意设备或者任意区域进行检测。
35.优选的:所述安装机体上还安装有分别面向四周的多个障碍物检测模组,所述障碍物检测模组的输出端与所述控制模组电性连接,以在所述安装机体通过轨道载具行进或通过所述升降云台升降的过程中,利用所述障碍物检测模组检测障碍物,在遇到障碍物时自动停止并报警,待障碍物移走后再恢复行进和升降,实现对巡检机器人的安全保护。
36.优选的:所述被巡检隧道安装有位于充电点的充电设备,在所述巡检机器人沿所述运行轨道移动至所述充电点时,所述巡检机器人的电源模组能够通过所述充电设备进行充电。
37.作为本发明的优选实施方式:所述多维传感子系统包括红外热成像摄像机、亮度检测器、风速风向传感器;所述设备状态数据包括:所述红外热成像摄像机检测所述被巡检隧道中照明设备得到的照明设备发热温度数据;所述亮度检测器检测所述被巡检隧道中照明设备得到的照度数据;所述红外热成像摄像机检测所述被巡检隧道中供配电设备得到的供配电设备发热温度数据;所述风速风向传感器检测所述被巡检隧道中通风设备得到的风速数据;
38.从而,本发明能够对被巡检隧道进行隧道设施设备巡检,所述监控管理子系统分析出所述被巡检隧道存在的设备故障情况,包括:
39.在所述照明设备发热温度数据高于相应的阈值或所述照度数据低于相应的阈值时,所述照明设备存在故障;
40.在供配电设备发热温度数据高于相应的阈值时,所述供配电设备存在故障;
41.在所述风速数据低于相应的阈值时,所述通风设备存在故障。
42.优选的:所述多维传感子系统包括激光雷达、毫米波雷达、能见度检测器、温湿度传感器;所述隧道环境数据包括:所述激光雷达检测所述被巡检隧道得到的隧道结构数据;所述激光雷达和毫米波雷达分别检测所述被巡检隧道中路面抛洒物得到的路面抛洒物数据以及检测所述被巡检隧道中车辆得到的车辆行驶数据;所述能见度检测器检测所述被巡检隧道得到的能见度数据;所述温湿度传感器检测所述被巡检隧道得到的温湿度数据;所述有害气体传感器检测所述被巡检隧道得到的有害气体浓度数据;
43.从而,本发明能够对被巡检隧道进行隧道环境监测,所述监控管理子系统分析出所述被巡检隧道存在的隧道环境异常情况,包括:
44.在所述隧道结构数据相较于标准隧道结构数据的变化超出相应的阈值时,所述被巡检隧道存在结构异常,例如:路面裂缝、衬砌裂缝、隧道结构变形等;
45.在检测到所述路面抛洒物数据时,所述被巡检隧道存在路面抛洒物异常;
46.在所述车辆行驶数据不符合预设的行驶规定时,所述被巡检隧道存在车辆行驶异常,例如:车辆违停、违规变道、违规超车等行为;
47.在所述能见度数据低于相应的阈值时,所述被巡检隧道存在能见度异常;
48.在所述温湿度数据超出相应的阈值范围时,所述被巡检隧道存在温湿度异常;
49.在所述有害气体浓度高于相应的阈值时,所述被巡检隧道存在空气质量超标异常,例如:co、no2。
50.优选的:所述多维传感子系统包括火灾探测模组、激光雷达、毫米波雷达;所述交通状况数据包括:所述火灾探测模组检测所述被巡检隧道得到的火灾探测数据;所述激光雷达、毫米波雷达分别检测所述被巡检隧道中车辆得到的交通事故数据;
51.从而,本发明能够对被巡检隧道进行交通事故监测,所述监控管理子系统分析出所述被巡检隧道存在的交通事故情况,包括:
52.在火灾探测数据超出相应的阈值时,所述被巡检隧道存在火灾事故,例如:通过所述火灾探测模组中的感温传感器、感烟传感器、图像火焰探测器、烟雾传感器等对被巡检隧道中的明火、温度、烟气等进行监测;
53.在检测到所述交通事故数据时,所述被巡检隧道存在交通事故。
54.优选的:所述多维传感子系统包括可见光摄像机;以使得工作人员能够通过可见光摄像机拍摄到的视频画面,检查被巡检隧道中照明设备、通风设备、视频监控设备、供配电设备、消防设施的运行状态、外观和摆放位置,并能对被巡检隧道的结构异常进行检查。
55.作为本发明的优选实施方式:所述的公路隧道智能化巡检机器人系统还包括安装在所述被巡检隧道内的信息展示子系统;所述监控管理子系统能够将巡检结果发送到所述信息展示子系统上进行显示,以提醒被巡检隧道内的司乘人员,隧道内存在的设备故障情况、隧道环境异常情况、交通事故情况;其中,所述信息展示子系统可以包括折叠led应急显
示屏、声光报警、动态隧道广播、语音交互等。
56.作为本发明的优选实施方式:所述的公路隧道智能化巡检机器人系统还包括应急处理子系统;所述应急处理子系统能够在所述监控管理子系统的控制下发出报警,也即在所述监控管理子系统分析出所述被巡检隧道存在设备故障情况、隧道环境异常情况、交通事故情况时,能够发出相应的报警,以便于工作人员及时处理隧道内的异常情况。
57.与现有技术相比,本发明具有以下有益效果:
58.第一,本发明设有移动机器人子系统、多维传感子系统、监控管理子系统,能够全天候对被巡检隧道中的设备、隧道环境、交通状况进行巡检,以代替人工完成公路隧道的相关运维巡检工作,及时发现异常情况,本发明具有巡检检测数据可靠性高、规范性好、巡检效率高、人工劳动强度低的优点。
59.第二,本发明所采用的移动机器人子系统,能够对被巡检隧道中的任意一处巡检工作点进行巡检检测,具有结构简单可靠、成本低的优点,并且,本发明能够工作在自主巡检模式和遥控巡检模式,通过自主巡检模式能够实现全天巡检、定时巡检、定点巡检和定任务巡检等多种巡检方式,以满足不同的巡检需求。
60.第三,本发明的多维传感子系统能够检测被巡检隧道中照明设备、供配电设备、通风设备的相关工作状态数据,并通过监控管理子系统分析出它们存在的故障,以便工作人员能够及时处理。
61.第四,本发明的多维传感子系统能够检测被巡检隧道的隧道结构数据、路面抛洒物数据、车辆行驶数据、能见度数据、温湿度数据、有害气体浓度数据,并通过监控管理子系统分析出存在的隧道环境异常情况,以便工作人员能够及时处理。
62.第五,本发明的多维传感子系统能够检测被巡检隧道的火灾探测数据和交通事故数据,并通过监控管理子系统分析出存在的交通事故情况,以便工作人员能够及时处理。
附图说明
63.下面结合附图和具体实施例对本发明作进一步的详细说明:
64.图1为本发明的公路隧道智能化巡检机器人系统的系统组成框图;
65.图2为本发明的公路隧道智能化巡检机器人系统的工作流程图;
66.图3为本发明中移动机器人子系统的安装示意图;
67.图4为本发明中巡检机器人的电路原理框图。
具体实施方式
68.下面结合实施例及其附图对本发明进行详细说明,以帮助本领域的技术人员更好的理解本发明的发明构思,但本发明权利要求的保护范围不限于下述实施例,对本领域的技术人员来说,在不脱离本发明之发明构思的前提下,没有做出创造性劳动所获得的所有其他实施例,都属于本发明的保护范围。
69.实施例一
70.如图1至图4所示,本发明公开的是一种基于多维传感的公路隧道智能化巡检机器人系统,包括:
71.移动机器人子系统,能够带动多维传感子系统在被巡检隧道1中移动;
72.多维传感子系统,能够检测获得所述被巡检隧道1的设备状态数据、隧道环境数据、交通状况数据;
73.监控管理子系统,能够实时接收所述设备状态数据、隧道环境数据、交通状况数据,并能够基于所述设备状态数据、隧道环境数据、交通状况数据中的一种或多种数据分析出所述被巡检隧道1存在的设备故障情况、隧道环境异常情况、交通事故情况。
74.从而,本发明能够代替人工完成公路隧道的相关运维巡检工作,以及时发现异常情况,具有巡检检测数据可靠性高、规范性好、巡检效率高、人工劳动强度低的优点。
75.实施例二
76.如图3和图4所示,在上述实施例一的基础上,本实施例二还采用了以下优选的实施方式:
77.所述移动机器人子系统包括运行轨道2和巡检机器人3,所述运行轨道2安装在所述被巡检隧道1的顶部并沿所述被巡检隧道1的走向延伸,所述巡检机器人3包括轨道载具3
‑
1、升降云台3
‑
2和安装机体3
‑
3,所述轨道载具3
‑
1安装于所述运行轨道2并能够沿所述运行轨道2前后运行,所述安装机体3
‑
3通过所述升降云台3
‑
2安装于所述轨道载具3
‑
1,所述升降云台3
‑
2能够带动所述安装机体3
‑
3升降运动;
78.并且,所述多维传感子系统安装在所述安装机体3
‑
3上,且所述安装机体3
‑
3上还安装有控制模组、定位模组、通讯模组和用于为巡检机器人3供电的电源模组,所述控制模组分别与所述轨道载具3
‑
1和升降云台3
‑
2的控制端电性连接,所述控制模组能够通过所述通讯模组接收来自所述监控管理子系统的控制指令,且所述控制模组能够将所述定位模组输出的定位数据以及所述多维传感子系统检测到的设备状态数据、隧道环境数据、交通状况数据通过所述通讯模组实时发送给所述监控管理子系统;
79.所述巡检机器人3能够工作在自主巡检模式和遥控巡检模式:
80.在所述自主巡检模式下,所述巡检机器人3由所述控制模组独立控制,按照预设的巡检时间移动至预设的巡检工作点,通过所述多维传感子系统在该巡检工作点处以及移动过程中进行相应数据(即相应的设备状态数据、隧道环境数据、交通状况数据)的检测,并将检测到的数据实时发送给所述监控管理子系统,其中,所述巡检工作点包含所述轨道载具3
‑
1在运行轨道2上的位置和所述升降云台3
‑
2对安装机体3
‑
3的升降高度,前者由所述定位模组进行定位;从而,在该模式下,巡检机器人3每到一个巡检工作点时能自动准确停车检测,做完规定的检测动作后再按照预先设定好的路径自动向下一个巡检工作点前进,由此,能够在公路隧道的例行巡检中,实现包括全天巡检、定时巡检、定点巡检和定任务巡检等多种巡检方式。
81.在所述遥控巡检模式下,所述巡检机器人3接收来自所述监控管理子系统的控制指令,按照该控制指令移动至相应的巡检工作点,通过所述多维传感子系统在该巡检工作点处以及移动过程中进行相应数据的检测,并将检测到的数据实时发送给所述监控管理子系统;从而,在该模式下,隧道运维人员可以通过监控管理子系统以遥控的方式,控制巡检机器人3对被巡检隧道1中的任意设备或者任意区域进行检测。
82.以上为本实施例二的基本实施方式,可以在该基本实施方式的基础上做进一步的优化、改进和限定:
83.优选的:所述安装机体3
‑
3上还安装有分别面向四周的多个障碍物检测模组,所述
障碍物检测模组的输出端与所述控制模组电性连接,以在所述安装机体3
‑
3通过轨道载具3
‑
1行进或通过所述升降云台3
‑
2升降的过程中,利用所述障碍物检测模组检测障碍物,在遇到障碍物时自动停止并报警,待障碍物移走后再恢复行进和升降,实现对巡检机器人3的安全保护。
84.优选的:所述被巡检隧道1安装有位于充电点的充电设备,在所述巡检机器人3沿所述运行轨道2移动至所述充电点时,所述巡检机器人3的电源模组能够通过所述充电设备进行充电。
85.实施例三
86.在上述实施例一或实施例二的基础上,本实施例三还采用了以下优选的实施方式:
87.所述多维传感子系统包括红外热成像摄像机、亮度检测器、风速风向传感器;所述设备状态数据包括:所述红外热成像摄像机检测所述被巡检隧道1中照明设备得到的照明设备发热温度数据;所述亮度检测器检测所述被巡检隧道1中照明设备得到的照度数据;所述红外热成像摄像机检测所述被巡检隧道1中供配电设备得到的供配电设备发热温度数据;所述风速风向传感器检测所述被巡检隧道1中通风设备得到的风速数据;
88.从而,本发明能够对被巡检隧道1进行隧道设施设备巡检,所述监控管理子系统分析出所述被巡检隧道1存在的设备故障情况,包括:
89.在所述照明设备发热温度数据高于相应的阈值或所述照度数据低于相应的阈值时,所述照明设备存在故障;
90.在供配电设备发热温度数据高于相应的阈值时,所述供配电设备存在故障;
91.在所述风速数据低于相应的阈值时,所述通风设备存在故障。
92.以上为本实施例三的基本实施方式,可以在该基本实施方式的基础上做进一步的优化、改进和限定:
93.优选的:所述多维传感子系统包括激光雷达、毫米波雷达、能见度检测器、温湿度传感器;所述隧道环境数据包括:所述激光雷达检测所述被巡检隧道1得到的隧道结构数据;所述激光雷达和毫米波雷达分别检测所述被巡检隧道1中路面抛洒物得到的路面抛洒物数据以及检测所述被巡检隧道1中车辆得到的车辆行驶数据;所述能见度检测器检测所述被巡检隧道1得到的能见度数据;所述温湿度传感器检测所述被巡检隧道1得到的温湿度数据;所述有害气体传感器检测所述被巡检隧道1得到的有害气体浓度数据;
94.从而,本发明能够对被巡检隧道1进行隧道环境监测,所述监控管理子系统分析出所述被巡检隧道1存在的隧道环境异常情况,包括:
95.在所述隧道结构数据相较于标准隧道结构数据的变化超出相应的阈值时,所述被巡检隧道1存在结构异常,例如:路面裂缝、衬砌裂缝、隧道结构变形等;
96.在检测到所述路面抛洒物数据时,所述被巡检隧道1存在路面抛洒物异常;
97.在所述车辆行驶数据不符合预设的行驶规定时,所述被巡检隧道1存在车辆行驶异常,例如:车辆违停、违规变道、违规超车等行为;
98.在所述能见度数据低于相应的阈值时,所述被巡检隧道1存在能见度异常;
99.在所述温湿度数据超出相应的阈值范围时,所述被巡检隧道1存在温湿度异常;
100.在所述有害气体浓度高于相应的阈值时,所述被巡检隧道1存在空气质量超标异
常,例如:co、no2。
101.优选的:所述多维传感子系统包括火灾探测模组、激光雷达、毫米波雷达;所述交通状况数据包括:所述火灾探测模组检测所述被巡检隧道1得到的火灾探测数据;所述激光雷达、毫米波雷达分别检测所述被巡检隧道1中车辆得到的交通事故数据;
102.从而,本发明能够对被巡检隧道1进行交通事故监测,所述监控管理子系统分析出所述被巡检隧道1存在的交通事故情况,包括:
103.在火灾探测数据超出相应的阈值时,所述被巡检隧道1存在火灾事故,例如:通过所述火灾探测模组中的感温传感器、感烟传感器、图像火焰探测器、烟雾传感器等对被巡检隧道1中的明火、温度、烟气等进行监测;
104.在检测到所述交通事故数据时,所述被巡检隧道1存在交通事故。
105.优选的:所述多维传感子系统包括可见光摄像机;以使得工作人员能够通过可见光摄像机拍摄到的视频画面,检查被巡检隧道1中照明设备、通风设备、视频监控设备、供配电设备、消防设施的运行状态、外观和摆放位置,并能对被巡检隧道1的结构异常进行检查。
106.实施例四
107.在上述实施例一至实施例三中任意一个实施例的基础上,本实施例四还采用了以下优选的实施方式:
108.所述的公路隧道智能化巡检机器人系统还包括安装在所述被巡检隧道1内的信息展示子系统;所述监控管理子系统能够将巡检结果发送到所述信息展示子系统上进行显示,以提醒被巡检隧道1内的司乘人员,隧道内存在的设备故障情况、隧道环境异常情况、交通事故情况;其中,所述信息展示子系统可以包括折叠led应急显示屏、声光报警、动态隧道广播、语音交互等。
109.实施例五
110.在上述实施例一至实施例四中任意一个实施例的基础上,本实施例五还采用了以下优选的实施方式:
111.所述的公路隧道智能化巡检机器人系统还包括应急处理子系统;所述应急处理子系统能够在所述监控管理子系统的控制下发出报警,也即在所述监控管理子系统分析出所述被巡检隧道1存在设备故障情况、隧道环境异常情况、交通事故情况时,能够发出相应的报警,以便于工作人员及时处理隧道内的异常情况。
112.本发明不局限于上述具体实施方式,根据上述内容,按照本领域的普通技术知识和惯用手段,在不脱离本发明上述基本技术思想前提下,本发明还可以做出其它多种形式的等效修改、替换或变更,均落在本发明的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1