光伏追踪与清扫机器人集成控制系统的制作方法
1.本发明涉及光伏发电控制的技术领域,尤其涉及一种光伏追踪与清扫机器人集成控制系统。
背景技术:
2.太阳能发电作为绿色环保发电模式逐渐被广泛应用。太阳能发电场通常在户外环境的不同区域布设多个光伏面板阵列,并收集每个光伏面板阵列转换的电能,从而实现大规模发电。为了实现光伏面板阵列的光伏转换效率的最优化,需要对每个光伏面板阵列进行追日控制和及时的表面清扫处理。现有技术通常是对每个光伏面板阵列设置分立的控制系统,来单独对每个光伏面板阵列进行追日控制和表面清洁处理,这不仅增加对光伏面板阵列的控制人力成本,并且还无法对所有光伏面板阵列进行协同化和集成化的追日与清扫处理,从而降低光伏发电系统的控制可靠性和集成性。
技术实现要素:
3.针对上述现有技术存在的缺陷,本发明提供光伏追踪与清扫机器人集成控制系统,其利用环境监测设备检测不同光伏发电设备各自所处的区域的环境信息,以及利用无线网络控制器根据该环境信息对所有光伏发电设备进行集中控制,从而使每个光伏发电设备能够根据自身所处的实际太阳光照状态和光伏面板表面灰尘存在状态,适应性地控制每个光伏发电设备实时追踪太阳光以及及时对光伏面板表面进行清扫,这不仅增加光伏发电设备的发电量,以及提高对所有光伏发电设备的控制协同性和集成性。
4.本发明提供光伏追踪与清扫机器人集成控制系统,其特征在于,包括:
5.环境监测设备,用于检测若干光伏发电设备各自所处的区域的环境信息;
6.无线网络控制器,其分别与所述环境监测设备以及每个光伏发电设备连接;
7.其特征在于,每个光伏发电设备包括:
8.光伏支架,用于安装光伏面板;
9.回转控制器,其与所述光伏支架驱动连接;
10.清扫机器人,其设置在光伏面板上;
11.所述无线网络控制器还与所述回转控制器连接,其用于根据所述环境信息,指示所述回转控制器控制所述光伏支架运动,从而使所述光伏面板的朝向实时追踪太阳高度角;
12.所述无线网络控制器还与所述清扫机器人连接,其用于根据所述环境信息,指示所述清扫机器人对所述光伏面板进行清扫;
13.进一步,所述环境监测设备包括太阳高度角探测器、太阳光强度传感器、空气微粒浓度传感器和环境信息发送器;
14.所述太阳高度角探测器用于检测所述区域的太阳高度角;
15.所述太阳光强度传感器用于检测所述区域的太阳光强度值;
16.所述空气微粒浓度传感器用于检测所述区域空气环境中pm10微粒或pm2.5微粒的浓度值;
17.所述环境信息发送器用于将所述太阳高度角、所述太阳光强度值和所述浓度值发送至所述无线网络控制器;
18.进一步,所述太阳高度角探测器包括第一摄像头和第一影像微处理器;
19.所述第一摄像头用于拍摄所述区域的太阳影像;
20.所述第一影像处理器与所述第一摄像头连接,用于分析所述太阳影像,从而确定所述区域的太阳高度角;
21.进一步,所述太阳光强度传感器包括光敏二极管阵列和光强信息微处理器;
22.所述光敏二极管阵列用于检测所述区域中不同位置处各自的太阳光强度值;
23.所述光强信息微处理器用于根据不同位置处各自的太阳光强度值,得到所述区域的单位面积平均太阳光强度值;
24.进一步,所述无线网络控制器包括数据接收器、arm数据处理器和指令信息发送器;
25.所述数据接收器与所述环境信息发送器无线连接,用于接收所述太阳高度角、所述太阳光强度值和所述浓度值;
26.所述arm数据处理器用于分析处理所述太阳高度角、所述太阳光强度值和所述浓度值,从而生成回转控制指令或清扫控制指令;
27.所述指令信息发送器分别与所述回转控制器和所述清扫机器人无线连接,用于向所述回转控制器和所述清扫机器人分别发送所述回转控制指令和所述清扫控制指令;
28.进一步,所述arm数据处理器生成所述回转控制指令具体包括:
29.所述arm数据处理器将所述太阳光强度值与预设光强度阈值进行比对,若所述太阳光强度值大于或等于预设光强度阈值,则生成第一回转控制指令;所述第一回转控制指令用于触发所述光伏支架开始旋转运动;
30.所述arm数据处理器确定所述光伏面板当前朝向与所述太阳高度角之间的角度大小/方向偏差,并根据所述角度大小/方向偏差,生成第二回转控制指令;所述第二回转控制指令用于控制所述光伏支架在旋转运动过程中,使所述光伏面板的朝向实时追踪太阳高度角;
31.进一步,所述arm数据处理器生成所述清扫控制指令具体包括:
32.所述arm数据处理器将所述浓度值与预设浓度阈值进行比对,若所述浓度值大于或等于预设浓度阈值,则生成第一清扫控制指令;所述第一清扫控制用于指示所述清扫机器人对所述光伏面板整体表面进行清扫;
33.进一步,所述环境监测设备还包括第二摄像头,用于拍摄所述光伏面板的表面,从而得到光伏面板表面影像;
34.所述环境信息发送器还用于将所述光伏面板表面影像发送至所述无线网络控制器;
35.所述arm数据处理器还用于分析处理所述光伏面板表面影像,从而生成第二清扫控制指令;所述第二清扫控制指令用于指示所述清扫机器人沿特定路径移动,以对所述光伏面板表面特定区域进行清扫;
36.进一步,所述arm数据处理器生成所述第二清扫控制指令具体包括:
37.所述arm数据处理器识别所述光伏面板表面影像,确定所述光伏面板表面的灰尘分布区域;
38.根据所述灰尘分布区域,确定特定路径;所述特定路径是经过和覆盖所述光伏面板表面存在的所有灰尘分布区域;
39.再生成指示所述清扫机器人沿所述特定路径连续移动的第二清扫控制指令;
40.进一步,所述环境监测设备还包括gps定位器和时钟器,用于分别检测每个光伏发电设备各自所处的区域的经纬度位置信息和实时时刻;
41.所述环境信息发送器还用于将所述经纬度位置信息和所述实时时间信息发送至所述无线网路控制器;
42.所述arm数据处理器根据所述经纬度位置信息,确定所述区域一天内的日照持续时间;再根据所述日照持续时间,生成回转控制持续时间指示指令;所述回转控制持续时间指示指令用于指示所述回转控制器在一天内控制所述光伏支架旋转的持续时间;
43.所述arm数据处理在所述实时时刻达到预设时刻点时,生成回转控制停止指示指令;所述回转控制停止指示指令用于指示所述回转控制器停止控制所述光伏支架旋转。
44.相比于现有技术,本发明的光伏追踪与清扫机器人集成控制系统利用环境监测设备检测不同光伏发电设备各自所处的区域的环境信息,以及利用无线网络控制器根据该环境信息对所有光伏发电设备进行集中控制,从而使每个光伏发电设备能够根据自身所处的实际太阳光照状态和光伏面板表面灰尘存在状态,适应性地控制每个光伏发电设备实时追踪太阳光以及及时对光伏面板表面进行清扫,这不仅增加光伏发电设备的发电量,以及提高对所有光伏发电设备的控制协同性和集成性。
附图说明
45.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
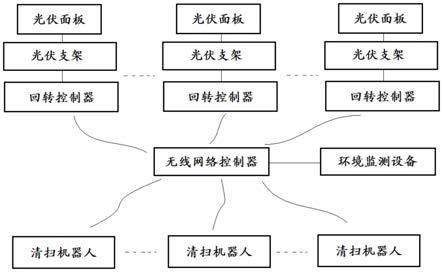
46.图1为本发明提供的光伏追踪与清扫机器人集成控制系统的结构示意图。
具体实施方式
47.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
48.参阅图1,为本发明提供的光伏追踪与清扫机器人集成控制系统的结构示意图。该光伏追踪与清扫机器人集成控制系统包括分布在不同区域的若干光伏发电设备、环境监测设备和无线网络控制器。
49.每个光伏发电设备均包括光伏支架、安装固定光伏支架上的光伏面板、与光伏支架驱动连接的回转控制器,以及设置在光伏面板上的清扫机器人。光伏支架用于支撑固定
光伏面板,以使光伏面板的受光面能够受到太阳光的照射。光伏支架可为但不限于是六自由度活动支架,能够在空间六自由度进行运动,并带动改变光伏面板的朝向。光伏面板可为但不限于是单晶硅光伏面板或者多晶硅光伏面板。当光伏面板受到太阳光的照射后,内部能够发生光伏转换反应,以将太阳能光光能转换为电能。
50.回转控制器可包括但不限于电机、动力输出轴以及轴承。电机与动力输出轴连接,动机输出轴通过轴承与光伏支架驱动连接。当电机运转时,能够驱动动力输出轴动作,进而带动光伏支架在空间六自由度上进行运动。
51.清扫机器人可为但不限于是扫地机器人,其设置在光伏面板的表面上,用于对光伏面板的表面进行清扫,以清除光伏面板表面上的灰尘,从而提高光伏面板表面的光照强度。
52.环境监测设备布置在光伏发电设备所处的区域中,用于检测对应区域的环境信息。环境信息可为但不限于是区域的气象信息和/或光伏面板表面的灰尘存在信息。环境监测设备将检测得到的环境信息通过无线通信的方式传送至无线网路控制器,以便于无线网络控制器对环境信息做进一步的分析处理。
53.无线网络控制器作为中央控制平台,其通过无线通信的方式与每个光伏发电设备连接,这样能够对所有光伏发电设备进行协同化和集成化的控制,这并不需要对每个光伏发电设备单独设置控制器进行分立控制,从而降低对所有光伏发电设备的控制成本,以及提高对所有光伏发电设备的集成控制可靠性。
54.无线网络控制器与每个光伏发电设备的回转控制器无线连接,当无线网络控制器接收和分析环境信息后,根据对应的分析结果,向回转控制器发送相应的控制指令。回转控制器在控制指令的作用下,能够驱动光伏支架进行旋转运动而调整光伏面板受光面的朝向,以保证光伏面板受光面的朝向始终与太阳高度角向匹配以及使光伏面板受光面始终垂直于太阳光,从而实现光伏面板的追日控制。
55.无线网络控制器还与每个光伏发电设备的清扫机器人无线连接,当无线网络控制器接收和分析环境信息后,根据对应的分析结果,向清扫机器人发送相应的控制指令。清扫机器人在控制指令的作用下,能够对光伏面板的表面进行清扫,以清除表面存在的灰尘,从而避免灰尘遮挡光伏面板表面而降低光伏面板的光伏转换效率。
56.在一些实施例中,环境监测设备可包括太阳高度角探测器、太阳光强度传感器、空气微粒浓度传感器以及环境信息发送器。太阳高度角探测器用于检测所述区域的太阳高度角。太阳光强度传感器用于检测所述区域的太阳光强度值。空气微粒浓度传感器用于检测所述区域空气环境中pm10微粒或pm2.5微粒的浓度值。环境信息发送器用于将太阳高度角、太阳光强度值和浓度值发送至无线网络控制器。
57.太阳高度角在一天内不同时刻是变化的,为实现光伏面板的光伏转换效率最优化,需要保证光伏面板的受光面朝向与太阳高度角始终保持一致,即需要保证光伏面板的受光面朝向与太阳光光线相垂直。太阳光强度值大小也会影响光伏面板的光伏转换效率高低,当太阳光强度值较大时,需要增加光伏面板的受光面的光照面积,从而将太阳光光能最大限度地转换为电能。此外,当空气中pm10微粒或pm2.5微粒的浓度较大,光伏面板表面更容易积聚灰尘,这需要及时对光伏面板表面进行清扫,以避免光伏面板表面积聚过厚的灰尘而影响光伏面板实际接收到的太阳光强度。
58.在一些实施例中,太阳高度角探测器包括第一摄像头和第一影像微处理器。第一摄像头用于拍摄区域的太阳影像。第一影像处理器与第一摄像头连接,用于分析太阳影像,从而确定区域的太阳高度角。通过对区域当前的太阳进行影像拍摄,并分析太阳影像,能够确定区域当前的太阳高度角,从而便于后续准确控制光伏面板的受光面朝向追踪太阳高度角。
59.在一些实施例中,太阳光强度传感器包括光敏二极管阵列和光强信息微处理器。光敏二极管阵列用于检测区域中不同位置处各自的太阳光强度值。光强信息微处理器用于根据不同位置处各自的太阳光强度值,得到区域的单位面积平均太阳光强度值。太阳光强度大小直接决定光伏面板的光伏转换效率高低,在太阳光强度较大时,指示回转控制器控制光伏支架开始旋转,以带动光伏面板正对太阳光,从而优化光伏面板的光伏转换反应。
60.在一些实施例中,无线网络控制器包括数据接收器、arm数据处理器和指令信息发送器。arm数据处理器是基于arm(advanced risc machine)来实现数据处理。数据接收器与环境信息发送器无线连接,用于接收太阳高度角、太阳光强度值和浓度值,数据接收器可通过但不限于4g信号、5g信号或者wifi信号与环境信息发送器进行无线连接。arm数据处理器能够根据太阳高度角、太阳光强度值和浓度值的分析处理结果,生成回转控制指令或清扫控制指令,从而分别控制回转控制器或清扫机器人的工作状态。
61.在一些实施例中,arm数据处理器将太阳光强度值与预设光强度阈值进行比对,若太阳光强度值大于或等于预设光强度阈值,则生成第一回转控制指令。当回转控制器接收到第一回转控制指令后,则触发光伏支架由原来的静止状态转换为旋转运动状态,从而使光伏支架带动光伏面板改变朝向以增大光伏面板的光照面积。
62.arm数据处理器确定光伏面板当前朝向与太阳高度角之间的角度大小/方向偏差,并根据角度大小/方向偏差,生成第二回转控制指令。当回转控制器接收到第二回转控制指令后,则控制光伏支架在旋转运动过程中以预定大小和方向的角度进行旋转,从而使光伏面板的朝向实时追踪太阳高度角,即保证光伏面板受光面与太阳光线垂直。
63.在一些实施例中,arm数据处理器将浓度值与预设浓度阈值进行比对,若浓度值大于或等于预设浓度阈值,则生成第一清扫控制指令。当清扫机器人接收到第一清扫控制指令后,能够在光伏面板的表面进行来回往复清扫,从而实现对光伏面板整体表面进行灰尘清扫。
64.在一些实施例中,环境监测设备还包括第二摄像头,用于拍摄光伏面板的表面,从而得到光伏面板表面影像。环境信息发送器还用于将光伏面板表面影像发送至无线网络控制器。arm数据处理器还用于分析处理光伏面板表面影像,从而生成第二清扫控制指令。当清扫机器人接收到第二清扫控制指令后,能够沿特定路径在光伏面板表面移动,并在移动过程中对光伏面板表面特定区域进行灰尘清扫,从而提高灰尘清扫的彻底性。
65.在一些实施例中,arm数据处理器识别光伏面板表面影像,确定光伏面板表面的灰尘分布区域。根据灰尘分布区域,确定特定路径;所述特定路径是经过和覆盖光伏面板表面存在的所有灰尘分布区域;再生成指示清扫机器人沿特定路径连续移动的第二清扫控制指令。光伏面板表面覆盖有灰尘时,光伏面板对应区域的光吸收率会降低,通过分析识别光伏面板表面影像,能够准确确定光伏面板表面存在的所有灰尘分布区域,从而指示清扫机器人对灰尘分布区域进行专门清扫,以快速和彻底地清除灰尘。
66.在一些实施例中,环境监测设备还包括gps定位器和时钟器,用于分别检测每个光伏发电设备各自所处的区域的经纬度位置信息和实时时刻。环境信息发送器将经纬度位置信息和实时时间信息发送至无线网路控制器。arm数据处理器根据经纬度位置信息,确定区域一天内的日照持续时间;再根据日照持续时间,生成回转控制持续时间指示指令;回转控制持续时间指示指令用于指示回转控制器在一天内控制光伏支架旋转的持续时间。arm数据处理在实时时刻达到预设时刻点时,生成回转控制停止指示指令;回转控制停止指示指令用于指示所述回转控制器停止控制所述光伏支架旋转。
67.不同经纬度区域在一天内的日照持续时间是不同的,根据经纬度位置信息,确定区域一天内的日照持续时间,再将确定的日照持续时间直接作为回转控制器在一天内控制光伏支架旋转的持续时间,能够充分利用太阳光照以及提高光伏面板的光伏转换效率。此外,在达到日落时刻,光伏面板将接收不到太阳光照,当确定实时时刻达到日落时刻,则生成回转控制停止指示指令,以指示回转控制器停止控制光伏支架旋转,这样能够避免光伏支架被过度旋转而发生损坏。
68.从上述实施例的内容可知,该光伏追踪与清扫机器人集成控制系统利用环境监测设备检测不同光伏发电设备各自所处的区域的环境信息,以及利用无线网络控制器根据该环境信息对所有光伏发电设备进行集中控制,从而使每个光伏发电设备能够根据自身所处的实际太阳光照状态和光伏面板表面灰尘存在状态,适应性地控制每个光伏发电设备实时追踪太阳光以及及时对光伏面板表面进行清扫,这不仅增加光伏发电设备的发电量,以及提高对所有光伏发电设备的控制协同性和集成性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1