一种电铲防失控系统的制作方法
1.本技术涉及电铲控制的技术领域,尤其是涉及一种电铲防失控系统。
背景技术:
2.电铲是千万吨级露天矿山主要采掘设备之一,具有生产效率高、作业率高以及操作成本低等优点,是目前采矿业公认的常用机型。
3.铲斗是电铲的主要工作部件,电铲在挖掘矿石的过程中,偶尔会出现失控的状态,此时铲斗由于自身重力的作用,向靠近地面的方向运动,电铲出现失控状态,电铲的挖掘力小于被挖掘矿石对铲斗的作用力,可能会对控制铲斗挖掘的电机产生损伤,从而使电铲的进线电源发生故障,导致铲斗处于失控状态,使铲斗对设备或工作人员造成伤害。
技术实现要素:
4.为了减小电铲发生失控时对设备或工作人员造成伤害的可能性,本技术提供了一种电铲防失控系统。
5.本技术提供的一种电铲防失控系统,采用如下的技术方案:
6.一种电铲防失控系统,电铲包括供电电源、铲斗、用于驱动铲斗运动的驱动电机以及与驱动电机电连接的变频器,所述供电电源用于提供电源,包括控制器、检测组件、能耗组件以及ups,所述ups的输入端与所述供电电源输出端电连接,所述检测组件所述变频器、检测组件、能耗组件以及ups均与所述控制器电连接;
7.所述变频器用于控制所述驱动电机的变频运行,以及向所述控制器传输反馈信息,其中,所述反馈信息包括变频器运行频率、变频器状态信息;
8.所述检测组件用于检测所述供电电源是否为所述电铲供电;
9.所述能耗组件用于吸收系统快速制动产生的回馈能量;
10.所述ups用于作为备用电源为所述电铲及所述控制器供电。
11.通过采用上述技术方案,当电铲处于失控状态时,检测组件检测到电铲的进线电源处于断电状态,同时ups自动启动,快速为控制器进行供电,控制器控制变频器输出,使变频器控制驱动电机做制动运行,从而使驱动电机对失控的铲斗进行制动,实现对铲斗的控制,当利用变频器快速对铲斗进行控制时,能量回馈大大加快,能耗组件能够对回馈能量迅速进行消耗,进而减小了失控铲斗对设备及工作人员伤害的可能性。
12.可选的,所述电铲还包括直流母线,所述能耗组件包括与所述直流母线电连接的若干个制动单元以及制动电阻器r,所述制动单元的交流供电端连接于外部交流电源电,所述制动单元的第一输出端连接于所述制动电阻器r的一端,所述制动电阻器r的另一端连接于所述制动单元的第二输出端。
13.通过采用上述技术方案,当利用变频器对铲斗进行快速制动时,铲斗的运行速度需要快速降速,此时系统降速时间缩短,能量回馈加快,控制器控制制动单元导通,使回馈能量通入制动电阻器内,制动电阻器将回馈的能量转换为热能,对回馈能量进行消耗,从而
使直流母线电压在安全范围内,进而对电铲进行保护。
14.可选的,所述制动单元与所述直流母线之间设置有熔断器fu,所述熔断器fu的一端连接于直流母线,所述熔断器fu的另一端连接于所述制动单元的直流供电端。
15.通过采用上述技术方案,当直流母线的电压大于熔断器的熔断电压时,熔断器的熔断丝被击穿,使熔断器断路,从而对制动单元进行保护。
16.可选的,所述检测组件包括电流互感器、电压互感器以及断电检测器,所述电流互感器、电压互感器以及断电检测器均与所述控制器电连接,所述电流互感器用于检测电铲内部流过的电流;所述电压互感器用于检测电铲内部的运行电压;所述断电检测器用于检测供电电源是否为所述电铲供电。
17.通过采用上述技术方案,当电铲内部的电流大于工作电流或电压大于工作电压时,控制器控制电铲紧急制动,从而对电铲进行保护,同时控制器记录电流和电压的运行数据,对工作人员检修提供辅助作用。
18.可选的,所述系统还包括切换组件以及光伏模块,所述切换组件的控制端与所述控制器电连接,所述切换组件的输入端分别连接于供电电源的输出端以及光伏模块的输出端,所述光伏模块与所述控制器电连接,所述切换组件用于实现供电电源以及所述光伏模块之间的切换。
19.通过采用上述技术方案,当电铲发生断电且ups的电量较低时,控制器控制切换组件进行自动切换,使光伏模块为电铲进行供电,从而保证电铲在断电的情况下,还能持续运行。
20.可选的,所述切换组件包括ats,所述ats的控制端与所述控制器电连接,所述ats的第一输入端连接于所述供电电源的输出端,所述ats的第二输入端连接于所述光伏模块的输出端,所述ats的输出端连接于所述电铲的电力系统。
21.通过采用上述技术方案,当供电电源发生故障时,ats进行自动切换,使光发模块为电铲的电力系统进行供电。
22.可选的,所述系统还包括触摸屏,所述触摸屏与所述控制器电连接,所述触摸屏用于显示防失控系统的运行参数,其中,所述运行参数包括电流、电压以及变频器运行频率。
23.通过采用上述技术方案,触摸屏可以显示防失控系统的运行参数,从而使工作人员了解电铲的运行情况。
24.可选的,所述防失控系统还包括报警器,所述报警器连接于所述控制器。
25.通过采用上述技术方案,当电铲处于失控或故障状态时,控制器控制报警器输出,从而对工作人员进行提醒。
26.综上所述,本技术包括以下至少一种有益技术效果:
27.1.当电铲处于失控状态时,检测组件检测到电铲的进线电源处于断电状态,同时ups自动启动,快速为控制器进行供电,控制器控制变频器输出,使变频器控制驱动电机做制动运行,从而使驱动电机对失控的铲斗进行制动,实现对铲斗的控制,当利用变频器快速对铲斗进行控制时,能量回馈大大加快,能耗组件能够对回馈能量迅速进行消耗,进而减小了失控铲斗对设备及工作人员伤害的可能性;
28.2.当利用变频器对铲斗进行快速制动时,铲斗的运行速度需要快速降速,此时系统降速时间缩短,能量回馈加快,控制器控制制动单元导通,使回馈能量通入制动电阻器
内,制动电阻器将回馈的能量转换为热能,对回馈能量进行消耗,从而使直流母线电压在安全范围内,进而对电铲进行保护;
29.3.当电铲发生断电且ups的电量较低时,控制器控制切换组件进行自动切换,使光伏模块为电铲进行供电,从而保证电铲在断电的情况下,还能持续运行。
附图说明
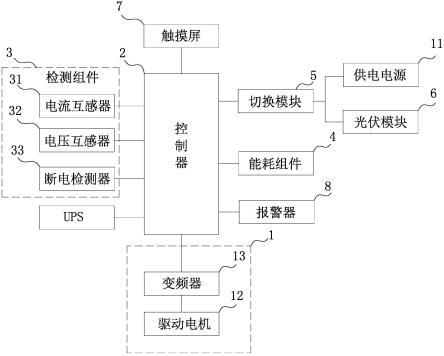
30.图1是本技术实施例的结构框图。
31.图2是本技术实施例能耗组件的电路原理图。
32.附图标记说明:1、电铲;11、供电电源;12、驱动电机;13、变频器;14、直流母线;2、控制器;3、检测组件;31、电流互感器;32、电压互感器;33、断电检测器;4、能耗组件;41、制动单元;5、切换组件;6、光伏模块;7、触摸屏;8、报警器。
具体实施方式
33.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图1-2及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本技术,并不用于限定本技术。
34.本技术实施例公开一种电铲防失控系统。参照图1和图2,电铲1包括供电电源11、铲斗、用于驱动铲斗运动的驱动电机12以及与驱动电机12电连接的变频器13,电铲防失控系统包括控制器2、检测组件3、两个能耗组件4以及ups,ups的输入端与供电电源11的输出端电连接,变频器13、检测组件3、能耗组件4以及ups均与控制器2电连接。
35.当电铲1由于断电而处于失控状态时,ups及时向电铲1提供电源,检测组件3检测到供电电源11故障,无法提供电源,及时向控制器2传输电信号,控制器2根据接收的电信号控制变频器13输出,使变频器13控制驱动电机12对电铲1进行反向制动,使电铲1发生失控状态时快速平稳的停车;当控制器2通过控制变频器13控制驱动电机12对铲斗进行快速降速时,会产生回馈能量反流进电铲1内,从而引起直流母线14电压过高,进而造成电铲1故障,而能耗组件4对回馈能量进行消耗,使直流母线14的电压保持在安全范围内,进而保证了设备的安全。
36.在本技术实施例中,电铲1还包括直流母线14,直流母线14包括正极母线l+和负极母线l-,正极母线l+和负极l-母线均连接于能耗组件4,能耗组件4包括制动单元41和与制动单元41电连接的制动电阻器r,制动单元41的dc+端连接于正极母线l+,制动单元41的dc-端连接于负极母线l-,制动单元41的火线l端和零线n端均连接于供电电源11,制动单元41的第一输出端rl1连接于制动电阻器r的一端,制动电阻器r的另一端连接于制动单元41的第二输出端rl2。其中,两个制动单元41互相补偿,互为备用。
37.当控制器2控制变频器13对电铲1进行电制动时,控制器2控制制动单元41导通,系统内的回馈能量通过直流母线14进入制动单元41内,制动单元41将回馈能量导入制动电阻器r内,制动电阻器r吸收回馈能量,并将回馈能量转换为热能,从而对回馈能量进行消耗;当控制器2控制变频器13对电铲1电制动结束之后,控制器2控制制动单元41截止,回馈能量不再流入制动电阻器r内,制动电阻器r不再将回馈能量转换为热能,开始自然散热,降低自身温度,便于下次使用。
38.在本实施例中,在制动单元41和直流母线14之间连接有熔断器fu,在制动单元41的dc+端与正极母线l+之间连接有第一熔断器fu1,在制动单元41的dc-端与负极母线l-之间连接有第二熔断器fu2,熔断器fu用于对制动单元41进行保护。
39.当直流母线14中流入熔断器43内的电流抄过熔断器fu的最大允许电流值时,熔断器fu自动熔断,从而对制动单元41进行保护。
40.在本实施例中,检测组件3包括电流互感器31、电压互感器32以及断电检测器33,电流互感器31、电压互感器32、断电检测器33均与控制器2电连接,其中,电流互感器31用于检测电铲1内部流过的电流,电压互感器32用于检测电铲1内部的运行电压,断电检测器33用于检测供电电源11是否为电铲1供电。
41.防失控系统还包括触摸屏7和报警器8,触摸屏7以及报警器8均与控制器2电连接。电流互感器31以及电压互感器32向控制器2传输电信号,并通过触摸屏7将电铲1内部的电流和电压显示出来,为工作人员掌握电铲1运行情况提供参考,同时控制器2根据接收的电信号对电铲1的运行情况进行判断,当电流和/或电压发生异常时,控制器2控制报警器8输出,从而对工作人员进行提醒。
42.作为本实施例的一种可选实施方式,防失控系统还包括切换组件5和光伏模块6,切换组件5的控制端连接于控制器2的输出端,供电电源11的输出端以及光伏模块6的输出端均连接于切换组件5的输入端。
43.当供电电源11出现故障时,控制器2控制切换组件5进行切换,使光伏模块6为电铲1及防失控系统提供电源,满足启动驱动电机12的电力需求。
44.在本实施例中,切换组件5包括ats,ats的控制端与控制器2电连接,ats的第一输入端连接于供电电源11的输出端,ats的第二输入端连接于光伏模块6的输出端,ats的输出端连接于电铲1的电力系统。
45.当供电电源11发生故障时,控制器2控制ats的第一输入端断开,同时控制ats的第二输入端导通,使光伏模块6为电铲1进行供电,从而减小电铲1由于供电电源11故障而出现的电铲1失控的可能性。
46.本技术实施例一种电铲1防失控系统的实施原理为:当供电电源11出现故障时,电流互感器31检测到电铲1内部的电流为零,电压互感器32检测到电铲1内部的电压为零,ups为控制器2提供电源,控制器2控制切换组件5进行切换,使光伏模块6为电铲1提供电源,然后控制器2控制变频器13输出,对驱动电机12进行电制动,在对驱动电机12进行电制动的同时,控制器2控制制动单元41导通,制动电阻器r吸收由于电制动产生的回馈能量,从而完成对电铲1的控制,进而减小电铲发生失控时对设备或工作人员造成伤害的可能性。
47.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,本说明书(包括摘要和附图)中公开的任一特征,除非特别叙述,均可被其他等效或者具有类似目的的替代特征加以替换。即,除非特别叙述,每个特征只是一系列等效或类似特征中的一个例子而已。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1