一种工业机器人控制器的制作方法
1.本实用新型涉及机器人控制器技术领域,尤其涉及一种工业机器人控制器。
背景技术:
2.工业机器人控制器是工业机器人必不可少的核心部件,随着科技的进步,需要工业机器人控制器不断升级来满足客户的使用,现有的工业机器人控制器生产成本高,且由于工业机器人控制器外部接口的设计不完善,可实现的功能较少,也无法完成升级换代,无法满足客户的需求。
技术实现要素:
3.本实用新型旨在解决现有技术的不足,而提供一种工业机器人控制器。
4.本实用新型为实现上述目的,采用以下技术方案:一种工业机器人控制器,包括arm处理器,arm处理器上设有2gb的ram内存(随机存取存储器)和8gb的rom内存(只读存储器),arm处理器的扩展存储接口连有tf卡座,arm处理器上连有can收发器,arm处理器通过can收发器连有can接口,arm处理器上设置有两个usb3.0接口和dp接口,dp接口连有dp显示接口,arm处理器上连有六路千兆以太网,其中四路通过四通道千兆以太网收发器引出,四通道千兆以太网收发器上连有四路gst5009mlf网口变压器,另外两路均通过单口千兆以太网控制器引出,单口千兆以太网控制器上连有gst5009mlf网口变压器,gst5009mlf网口变压器上连有rj45连接器,arm处理器的两个uart接口(通用异步收发器)均连有rs232串口,arm处理器连有供电电路,供电电路与输入电源连接。
5.2gb的ram为2g的ddr4内存。
6.8gb的rom为8g的emmc内存。
7.输入电源为dc24v。
8.供电电路将dc24v转化成dc12v。
9.本实用新型的有益效果是:本实用新型可以完成升级换代,且升级换代后可根据需求继续供给原有客户使用,且生产成本低。此外,本实用新型设置有不同的接口,可以实现多种功能,满足客户的需求。
附图说明
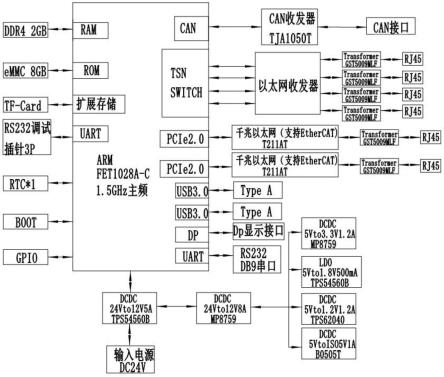
10.图1为本实用新型的结构示意图;
11.图2为dp接口的电路图;
12.图3为网口的电路图;
13.图4为uart接口的电路图;
14.图5为can接口的电路图;
15.图6为供电电路的原理图;
16.以下将结合本实用新型的实施例参照附图进行详细叙述。
具体实施方式
17.下面结合附图和实施例对本实用新型作进一步说明:
18.如图1至图6所示,一种工业机器人控制器,包括arm处理器,arm处理器上设有2gb的ram内存和8gb的rom内存,arm处理器的扩展存储接口连有tf卡座,arm处理器上连有can收发器,arm处理器通过can收发器连有can接口,arm处理器上设置有两个usb3.0接口和dp接口,dp接口连有dp显示接口,arm处理器上连有六路千兆以太网,其中四路通过四通道千兆以太网收发器引出,四通道千兆以太网收发器上连有四路gst5009mlf网口变压器,另外两路均通过单口千兆以太网控制器引出,单口千兆以太网控制器上连有gst5009mlf网口变压器,gst5009mlf网口变压器上连有rj45连接器,arm处理器的两个uart接口均连有rs232串口,arm处理器连有供电电路,供电电路与输入电源连接。
19.arm处理器采用fet1028a-c作为主处理器,采用双核cortex-a72架构,主频1.5ghz,搭配2gb的ddr4内存和8gb的emmc内存,dc12v供电。1路display port接口(dp接口),支持dp1.3和edp1.4,最高支持4kp60。
20.如图2所示,dp接口分辨率最大支持4k,接口做防电压倒灌设计,采用标准typea接口引出。
21.如图3所示,六路千兆以太网中的两路千兆以太网,支持ethercat协议,rj45连接器引出。采用intel i211at网卡,低功耗、小尺寸,具有先进的性能特点的单端口的千兆网络连接,为运行严格控制的媒体流同步和缓冲提供了理想的gbe解决方案,增强网络连接性,其功能可提高嵌入式应用的性能;可以配置的完全集成的gbe mac/phy功能适用于1000mb/s或10/100mb/s操作模式。
22.如图4所示,arm处理器引出的uart接口的电平为1.8v,需经过电平转换芯片转换为3.3v电平,再经过rs232芯片转换为rs232电平。信号从arm处理器下来之后,先经过电平转换,然后通过磁隔、max3232接到连接器。磁隔采用adi的双通道数字隔离器adum1201,完成3v-5v的电平转换,数据速率可高达25mbps,将高速cmos与单芯片变压器技术融为一体,能够跨越隔离栅实现电压转换功能。此外,adum1201具有低脉冲宽度失真(cr级小于3ns)和严格的通道间匹配(cr级小于3ns)特性。与其它光耦合器不同,adum1201隔离器具有刷新特性,可确保不存在输入逻辑转换时及上电/关断条件下的直流正确性。rs232芯片采用max公司的max3221芯片,电压供电电压为3v~5.5v,包含一个线驱动器一个线接收器和一个带有
±
15-kv esd保护的双电荷汞。该器件可满足tia/eia-232-f要求,并在一个异步通信控制器和串行端口连接器之间提供接口电荷汞和四个小型外接电容器。可在单路3v至5.5v电源电压下工作这些器件在数据信号率达到250kbit/s,且最大的30-v/s驱动输出回转率时工作。金升阳b0505t为信号隔离提供了隔离电平。串口支持默认波特率为115200。
23.如图5所示,arm处理器引出的can为1.8v电平,需经过电平转换芯片转换为3.3v电平,再经过磁隔和收发器接到连接器。can接口收发器采用nxp的tja1050t can收发器,有较低电磁辐射,高低温特性好,满足工业级产品要求。具有宽共模范围的差分接收器,具备高电磁抗干扰性,未通电的节点不会干扰总线线路,发送数据txd显性超时功能,静默模式中发送器被禁用,3.3v标准can控制器接口,可连接至少110个节点。
24.如图6所示,整板供电输入dc24v,电源连接器采用jst j21df-06v-kx-l。电源24v转12v采用ti德州仪器dc-dc芯片tps5456,支持宽压4.5v~60v输入,包含一个高性能电压
误差放大器,可在瞬态条件下提供严格的电压调节精度;一个欠压锁定电路,用于防止启动直到输入电压达到4.5v,欠压锁定电路内部设置的慢启动电路,用于限制浪涌电流和电压前馈电路,以改善瞬态响应。使用ena引脚,145ua工作静态电流和2ua关断电流。为降低设计复杂性和外部元件数量,tps5456电源模块反馈环路经过内部补偿。内部补偿最大限度地减少了外部器件的数量。能工作在-40℃~125℃的恶劣环境。
25.本实用新型可以完成升级换代,且升级换代后可根据需求继续供给原有客户使用,且生产成本低。此外,本实用新型设置有多个不同的接口,可以实现多种功能,满足客户的需求。
26.本实用新型中的“一号”“二号”等仅是为了区分不同零件的名称,不代表其规格,更不代表其安装顺序。
27.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
28.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
29.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接或彼此可通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
30.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
31.上面结合附图对本实用新型进行了示例性描述,显然本实用新型具体实现并不受上述方式的限制,只要采用了本实用新型的方法构思和技术方案进行的各种改进,或未经改进直接应用于其它场合的,均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1