一种基于峰值的光斑图像定位方法及其系统与流程
1.本发明属于图像处理技术领域,具体涉及一种基于峰值的光斑图像定位方法及其系统。
背景技术:
2.在空间激光通信的瞄准、捕获、跟踪子系统中,通常将信标光或信号光在光学位置传感器光敏面上所成的光斑作为跟踪目标,控制精瞄装置和粗瞄装置使光斑位置始终保持在传感器光敏面的中心。由于光斑位置精度影响整个跟踪子系统的跟踪精度,最终影响空间激光通信的效率,因此在空间激光通信,需要一种高精度的图像光斑定位获取方法。目前常用的光斑定位获取方法是质心法,该方法适合于光强分布均匀、对称性好的光斑图像,受光学位置传感器非均匀性和疵点的干扰以及其他噪声光源的干扰影响较大。
技术实现要素:
3.为解决以上现有技术存在的问题,本发明提出了一种基于峰值的光斑图像定位方法,该方法包括:实时获取图像数据,将获取的图像数据存储到缓存区中;在进行图像数据缓存过程中对图像数据的每个像元进行行列计数,得到除疵点外的最大灰度值像元,并记录该像元的坐标;
4.以最大灰度值像元坐标为中心点,光斑直径的两倍为一个新的光斑位置计算窗的边长,对光斑位置计算窗里的数据进行二值化处理;
5.根据二值化处理后的光斑图像,以第一个亮点为中心起点,根据图像边缘连续原则获取光斑图轮廓;
6.根据光斑图轮廓计算光斑的粗坐标;根据得到的光斑粗坐标计算光斑的精坐标。
7.优选的,对图像数据的每个像元行列计算包括根据图像数据接收的时钟信号进行行列计数。
8.优选的,对光斑位置计算窗里的数据进行二值化处理的过程包括:将对光斑位置计算窗分割为m丈n维的图像,将图像中第m行第n列像元坐标标记为(x
m
,y
n
),第m行第n列像元的灰度值为i(x
m
,y
n
);设置阈值t,将各个像元灰度值与设置的阈值进行比较,若像元灰度值大于等于设置的阈值时,将该像元信号的幅值设置为1,若像元灰度值小于设置的阈值时,将该像元信号的幅值设置为0。
9.进一步的,设置的阈值t为无亮光斑图像下背景噪声最大值。
10.优选的,根据图像边缘连续原则获取图像的轮廓的过程包括:获取光斑图像的第一边缘点,并确定第一边缘点的坐标;规定第一边缘点的扫描方向为右,若第一边缘点的右侧点为亮点,则记录下该边缘点,并继续轮廓扫描;若第一边缘点的右侧点为暗点,则判断右下侧点是否为亮点,若为亮点,则继续轮廓扫描;若为暗点,则按顺时针方向依次进行判断,直到找到下一个边缘点;将找到的边缘点作为第二边缘点,并获取第二边缘点的坐标;规定以第二边缘点相对于第一边缘点方向逆时针旋转90
°
作为第二边缘点的第一次判断方
向,若该方向点不是边缘点,则再按照逆时针方向进行判断,直到最后找到的边缘点坐标与第一边缘点坐标重合。
11.优选的,计算光斑的粗坐标的过程包括:以封闭光斑图像轮廓为边界,获取所有亮点的坐标,根据获取的坐标计算各个亮点到边界的最近距离rmin(x,y);筛选出所有最近距离的最大值,并记录该最大值以及该值对应的坐标,将该坐标作为光斑定位的粗坐标,最大的最近距离值为光斑尺寸的粗尺寸,即光斑定位的粗略半径。
12.优选的,计算光斑的精坐标的过程包括:粗坐标为中心点,两个像元尺寸为边长,将每个像元细分n个单位,在每个单元中找出所有距离图像轮廓最近点的坐标及距离最大的点,该点的坐标为光斑定位的精坐标,该距离为光斑尺寸的精尺寸。
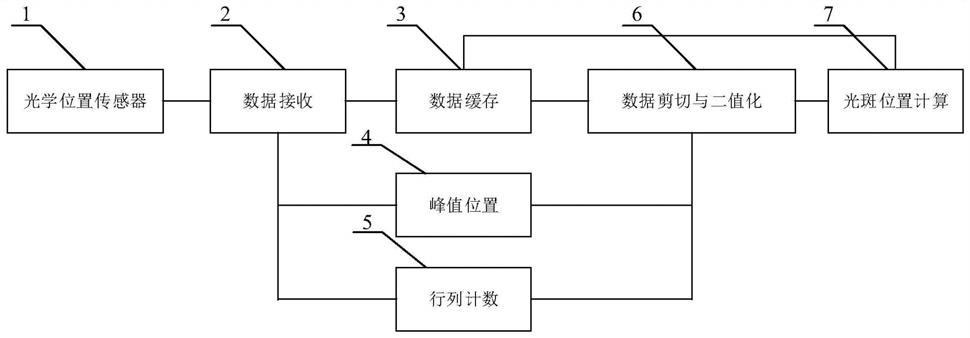
13.一种基于峰值的光斑图像定位系统,该系统包括:数据获取模块、数据接收模块、数据缓存模块、峰值位置模块、行列计数模块、数据剪切与二值化模块、光斑位置计算模块以及输出模块;
14.所述数据获取模块用于获取图像数据,并将获取的图形数据发送到数据接收模块中;
15.所述数据接收模块接收到图像数据后将图像分别发送到数据缓存器、峰值位置模块以及行列计数模块中;
16.所述数据缓存模块用于存储图像数据;
17.所述峰值位置模块用于用于计算图像的灰度值,并记录所有像元的灰度值,对所有像元的灰度值进行两两比较,得到除疵点外的最大灰度值,并记录该像元的坐标;
18.所述行列计数模块用于根据图像数据接收的时钟信号进行行列计数,得到行列计数结果;
19.所述数据剪切与二值化模块获取数据缓存模块中的图像数据,并根据峰值位置模块得到的除疵点外的最大灰度值的像元坐标和行列计数结果对图像数据进行剪切,得到光斑位置计算窗,并对光斑位置窗中的数据进行二值化处理;
20.所述光斑位置计算模块根据数据剪切与二值化模块的处理结果计算光斑的精坐标和精尺寸;
21.所述输出模块用于输出光斑位置计算模块的计算结果。
22.本发明通过取峰值的第一次坐标,和二次开窗减小搜索范围,再找光斑图像边界轮廓,找光斑粗坐标和尺寸,通过二次细分找光斑的精坐标和精尺寸,从而获取光斑的定位。在保证计算实时性高的前提下,相比于传统的质心计算,提升了光斑位置稳定性,减小了由于光学位置传感器自身的疵点和非均匀性对位置计算的影响,能够明显地减小由光斑图像的不规则带来的位置精度误差。
附图说明
23.图1为本发明中光斑定位获取方法示意图;
24.图2为本发明中光斑定位获取原理实例示意图。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.一种基于峰值的光斑图像定位方法,该方法包括:实时获取图像数据,将获取的图像数据存储到缓存区中;在进行图像数据缓存过程中对图像数据的每个像元进行行列计数,得到除疵点外的最大灰度值像元,并记录该像元的坐标;
27.以最大灰度值像元坐标为中心点,光斑直径的两倍为一个新的光斑位置计算窗的边长,对光斑位置计算窗里的数据进行二值化处理;
28.根据二值化处理后的光斑图像,以第一个亮点为中心起点,根据图像边缘连续原则获取光斑图轮廓;
29.根据光斑图轮廓计算光斑的粗坐标;根据得到的光斑粗坐标计算光斑的精坐标。
30.采用光学位置传感器实时获取图像数据;并非将获取的数据存放到一个缓存区。
31.图像传感器在进行图像数据传输时,按第一行第一列、第一行第二列......第一行最后一列、第二行第一列、第二行第二列......最后一行最后一列的顺序输出图像数据,一个时钟周期输出一个像元。按图像数据输出的规律,对图像数据的每个像元行列计数。
32.对光斑位置计算窗里的数据进行二值化处理的过程包括:将对光斑位置计算窗分割为m
×
n维的图像,将图像中第m行第n列像元坐标标记为(x
m
,y
n
),第m行第n列像元的灰度值为i(x
m
,y
n
);设置阈值t,将各个像元灰度值与设置的阈值进行比较,若像元灰度值大于等于设置的阈值时,将该像元信号的幅值设置为1,若像元灰度值小于设置的阈值时,将该像元信号的幅值设置为0。
33.优选的,设置的阈值t为无亮光斑图像下背景噪声最大值。
34.根据图像边缘连续原则获取图像的轮廓的过程包括:获取光斑图像的第一边缘点,并确定第一边缘点的坐标;规定第一边缘点的扫描方向为右,若第一边缘点的右侧点为亮点,则记录下该边缘点,并继续轮廓扫描;若第一边缘点的右侧点为暗点,则判断右下侧点是否为亮点,若为亮点,则继续轮廓扫描;若为暗点,则按顺时针方向依次进行判断,直到找到下一个边缘点;将找到的边缘点作为第二边缘点,并获取第二边缘点的坐标;规定以第二边缘点相对于第一边缘点方向逆时针旋转90
°
作为第二边缘点的第一次判断方向,若该方向点不是边缘点,则再按照逆时针方向进行判断,直到最后找到的边缘点坐标与第一边缘点坐标重合。
35.计算光斑的粗坐标的过程包括:以封闭光斑图像轮廓为边界,获取所有亮点的坐标,根据获取的坐标计算各个亮点到边界的最近距离rmin(x,y);筛选出所有最近距离的最大值,并记录该最大值以及该值对应的坐标,将该坐标作为光斑定位的粗坐标,最大的最近距离值为光斑尺寸的粗尺寸,即光斑定位的粗略半径。
36.计算光斑的精坐标的过程包括:粗坐标为中心点,两个像元尺寸为边长,将每个像元细分n个单位,在每个单元中找出所有距离图像轮廓最近点的坐标及距离最大的点,该点的坐标为光斑定位的精坐标,该距离为光斑尺寸的精尺寸。最终得到的光斑定位获取的结果图如图2所示。
37.一种基于峰值的光斑图像定位系统,如图1所示,该系统包括:数据获取模块、数据接收模块、数据缓存模块、峰值位置模块、行列计数模块、数据剪切与二值化模块、光斑位置
计算模块以及输出模块;
38.所述数据获取模块用于获取图像数据,并将获取的图形数据发送到数据接收模块中;
39.所述数据接收模块接收到图像数据后将图像分别发送到数据缓存器、峰值位置模块以及行列计数模块中;
40.所述数据缓存模块用于存储图像数据;
41.所述峰值位置模块用于用于计算图像的灰度值,并记录所有像元的灰度值,对所有像元的灰度值进行两两比较,得到除疵点外的最大灰度值,并记录该像元的坐标;
42.所述行列计数模块用于根据图像数据接收的时钟信号进行行列计数,得到行列计数结果;
43.所述数据剪切与二值化模块获取数据缓存模块中的图像数据,并根据峰值位置模块得到的除疵点外的最大灰度值的像元坐标和行列计数结果对图像数据进行剪切,得到光斑位置计算窗,并对光斑位置窗中的数据进行二值化处理;
44.所述光斑位置计算模块根据数据剪切与二值化模块的处理结果计算光斑的精坐标和精尺寸;
45.所述输出模块用于输出光斑位置计算模块的计算结果。
46.具体的,光学位置传感器产生图像数据,数据接收模块用于接收图像数据,并将接收到的图像数据缓存在数据缓存中。在缓存数据的同时,行列计数模块会对行列数据进行计数,记录当前缓存数据的行数和列数,峰值位置模块会对记录当前帧图像最大灰度值的坐标,并将坐标发送给数据剪切与二值化模块。数据剪切与二值化模块剪切带光斑的一小区域图像进行二值化处理,将处理完后的数据发送给光斑位置计算模块,光斑位置计算模块可用于光斑坐标的计算。
47.基于上述结构,本实施例提供了一种基于峰值的图像光斑定位方法的具体实施方式,该方法包括:
48.s1:通过数据接收模块将光学位置传感器中的图像数据存放到一个数据缓存区,在数据存放同时,行列计数模块根据图像数据接收的时钟信号进行行列的计数,峰值位置模块将灰度值两两比较,记录图像输出顺序中第一个点的坐标(x
f
,y
f
),除疵点外的最大灰度值,并记录下该像元的坐标(x
p
,y
p
);
49.s2:数据剪切与二值化模块以最大灰度值像元坐标(x
p
,y
p
)为光斑位置计算窗的中心,以光斑直径d的两倍作为光斑位置计算窗的边长,从数据缓存区中提取光斑位置计算窗的数据,将光斑位置计算窗里的数据进行二值化处理;
50.二值化处理过程如下:设大小为m
×
n维图像,第m行第n列像元坐标标记为(x
m
,y
n
),第m行第n列像元的灰度值为i(x
m
,y
n
),其中灰度值大于等于阈值t的像元信号幅值为1;灰度值小于阈值t的像元信号幅值为0。如下式所示:
[0051][0052]
s3:在二值化处理后的图像中,以坐标(x
f
,y
f
)为第一点开始找光斑图像轮廓。由于图像数据按行输出,因此规定第一个点扫描方向为右。如果右侧点为亮点,则记录下该边缘
点,继续扫描轮廓;如右侧点为暗点,判断右下侧点是否为亮点,按顺时针方向依次进行判断,直到找到下一个边缘点。在第二个边缘点处,将第二点相对于第一点方向逆时针旋转90
°
作为第一次判断的方向,如果该方向点不是边缘点,再按逆时针方向进行判断。以此类推,直到最后找到的边缘点坐标与第一边缘点坐标(x
f
,y
f
)重合;
[0053]
s4:以封闭光斑图像轮廓为边界,记录所有亮点离边界的最近距离rmin(x,y),记录rmin中最大的值,及对应坐标(x
c
,y
c
),以该坐标(x
c
,y
c
)作为光斑定位的粗坐标,该距离rmin(x
c
,y
c
)是光斑尺寸的粗尺寸,即粗略的半径;
[0054]
s5:以粗坐标(x
c
,y
c
)为中心点,以两个像元尺寸为边长,每个像元细分n个单位,n取决于所需光斑定位精度。以n=10为例,细分后的点为(x
c
‑
1,y
c
‑
1)、(x
c
‑
0.9,y
c
‑
1)、(x
c
‑
0.8,y
c
‑
1)...(x
c
+1,y
c
‑
1)、(x
c
‑
1,y
c
‑
0.9)、(x
c
‑
0.9,y
c
‑
0.9)...(x
c
+1,y
c
+1)。再在这(2n+1)2个点中记录所有亮点离边界的最近距离rfmin(x,y),记录rfmin中最大的值,及对应坐标(x
f
,y
f
),以该坐标(x
f
,y
f
)作为光斑定位的精坐标,该距离rmin(x
f
,y
f
)是光斑尺寸的精尺寸,即精确的半径。
[0055]
本发明通过峰值迅速找到光斑位置的粗略位置,利用二次开窗的光斑计算的进行准确光斑位置计算,在保证图像光斑定位获取过程中实时性高的前提下,提升了图像光斑定位的稳定性和抗干扰能力。
[0056]
以上所举实施例,对本发明的目的、技术方案和优点进行了进一步的详细说明,所应理解的是,以上所举实施例仅为本发明的优选实施方式而已,并不用以限制本发明,凡在本发明的精神和原则之内对本发明所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1