一种基于平滑图信号的多功能雷达工作模式识别方法
1.本发明涉及电子侦察技术领域,尤其涉及一种基于平滑图信号的多功能雷达工作模式识别方法。
背景技术:
2.多功能雷达(multi-function radar,mfr)因其具有多工作模式、智能程度高、可靠性强等优点被广泛应用于电子战,给雷达侦察和对抗带来巨大挑战。mfr信号被截获概率较低,因此在短时间内可截获信号样本较少;不对mfr施加一定对抗压力,其某些工作模式可能会被隐藏。而雷达工作模式作为判断雷达系统威胁等级的重要依据,是电子攻防决策的基础。
3.现有的mfr工作模式识别方法主要包括基于句法模型的方法、基于数据融合的方法、基于深度学习的方法等。基于句法模型的方法根据雷达工作模式转移的文法类型,通过构造相应的自动机实现对工作模式分类,该方法理论性较强,但它是一种正向建模过程,难以应用于非合作方。基于数据融合的方法先计算待测信号对于某一工作模式的隶属度,然后将多个平台或不同时刻的识别结果进行融合,最终确定待测信号属于何种工作模式,该方法虽然能取得较好识别效果,但需取得充分的mfr信号先验信息。基于深度学习的方法通过对脉冲特征、脉组结构进行分析实现mfr工作模式识别,但训练深度学习模型所需的监督数据不易获得,除大规模监督数据难以获取外,由于截获的mfr常用模式(如搜索)和不常用模式(如跟踪)样本数相差较大,样本集通常存在工作模式样本不平衡现象。
技术实现要素:
4.本发明的目的在于提供一种基于平滑图信号的多功能雷达工作模式识别方法,能够对改善现有的多功能雷达工作模式识别任务中存在的监督数据少与工作模式样本不平衡的技术问题。
5.为实现上述目的,本发明提供了一种基于平滑图信号的多功能雷达工作模式识别方法,包括下列步骤:
6.数据预处理;
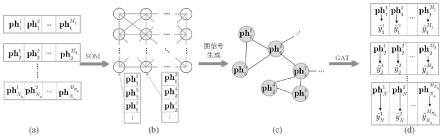
7.利用som算法对全局信号样本进行聚类;
8.通过som的聚类结果生成平滑图信号;
9.将所述平滑图信号进行节点分类。
10.其中,在数据预处理的过程中通过均值与标准差对数据进行标准化处理。
11.其中,在利用som算法对全局信号样本进行聚类的过程中,首先计算输入信号样本与各簇中心的距离,具体采用欧氏距离计算距离,与之距离最小的簇为优胜簇,然后调整优胜簇及其邻居簇的中心,最终完成对数据集拓扑映射。
12.其中,通过som的聚类结果生成平滑图信号的过程中,基于簇内样本全连接与相邻簇间样本部分连接的条件下,每次迭代时选择一个簇为主簇,将主簇所含样本集的样本作
全连接处理,直至所有簇都曾被设为主簇。
13.其中,在将所述平滑图信号进行节点分类的过程中,将所述平滑图信号的所有节点的特征向量输入图注意力网络,所述图注意力网络输出层通过对多头注意力取平均值得到样本所属工作模式。
14.本发明提供了一种基于平滑图信号的多功能雷达工作模式识别方法,首先利用自组织映射算法的聚类结果以平滑图信号的方式表征全局信号样本,由于自组织映射算法聚类结果不仅能直接体现簇间拓扑关系,还能反映样本空间分布状况,且相邻簇在样本空间内也相邻,因此根据簇邻居关系生成的图信号具有平滑性,通过先将全局样本生成一个平滑图信号,解决工作模式样本不平衡问题;然后采用图注意力网络对上述图信号进行节点级数据融合与分类,完成监督数据不足情况下的多功能雷达工作模式识别任务。
附图说明
15.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
16.图1是本发明的一种基于平滑图信号的多功能雷达工作模式识别方法的流程示意图。
17.图2是本发明的具体实施例的对抗场景示意图。
18.图3是本发明的具体实施例在四个不同噪声场景下的识别结果随监督数据个数的变化曲线图。
具体实施方式
19.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
20.请参阅图1至图3,本发明提出了一种基于平滑图信号的多功能雷达工作模式识别方法,包括下列步骤:
21.s1:数据预处理;
22.s2:利用som算法对全局信号样本进行聚类;
23.s3:通过som的聚类结果生成平滑图信号;
24.s4:将所述平滑图信号进行节点分类。
25.具体地,在数据预处理的过程中对数据进行标准化处理,
[0026][0027]
其中mean(
·
)和std(
·
)分别为均值与标准差。
[0028]
在利用som算法对全局信号样本进行聚类的过程中,首先计算输入信号样本与各簇中心的距离,与之距离最小的簇为优胜簇,然后调整优胜簇及其邻居簇的中心,最终完成
对数据集拓扑映射。
[0029]
som如算法1所示。
[0030][0031][0032]
其中表示以簇u,v(第u行第v列)为中心的邻域函数
[0033][0034]
其中σ为邻域因子,表示簇u,v与i,j的欧氏距离。该算法时间复杂度约为o(en
x
rc),其中n
x
为输入数据数目。
[0035]
通过som的聚类结果生成平滑图信号,由于拓扑上相邻的簇在样本空间中也相邻,所以簇与簇之间的过渡是平滑的。因此本发明基于两方面,即簇内样本全连接、相邻簇间样本部分连接,给出一种基于som的平滑图信号生成算法。算法过程如下:
[0036]
(i)选择一个簇为主簇,分别初始化主簇、邻居簇的连接比例为r
main
、r
vice
,邻接矩阵为维度为n
x
的单位矩阵。
[0037]
(ii)令主簇所含样本集的索引为其中num
main
为该簇内样本数目。然后将这些样本作全连接处理,即邻接矩阵中对应项置1,a(idx
main
,idx
main
)=1。
[0038]
(iii)分别计算各邻居簇所含样本与主簇中心的距离,取其中距离最小的若干个样本的索引其中nn为邻居簇数目,numi为第i个邻居簇所含样本数目,
·
为向上取整。
[0039]
(iv)从idx
vice
中选取一个值,令其为iv,在主簇中随机取num
main
×rmain
个样本的索引然后执行a(iv,idx
′
main
)=1。重复该步骤,直至idx
vice
中所有项都执行过步骤(iv)。
[0040]
(v)返回步骤(ii),直至所有簇都曾被设为主簇。
[0041]
由于聚类结果具有不确定性,不便直接分析其时间复杂度,因此假设各簇内样本数目相等,则该算法时间复杂度约为o(n
xnn
)。
[0042]
将所述平滑图信号进行节点分类:
[0043]
gat由若干个图注意力层堆叠构造。任一层的细节基本相同,其输入为图信号所有节点的特征向量h=h1,h2,...,hn,其中n为节点总数,f为节点特征维度。首先,利用下式子获得邻居节点的注意力系数(即权重)为
[0044][0045]
其中α
ij
表示节点j对节点i的注意力系数,为节点i的一阶邻居节点集,leakyrelu函数是为了引入非线性,为一个单层前馈网络的权值向量,是一个可学习的线性变换矩阵,a、w均通过梯度下降法求得,
·
t表示转置,||为串联操作。然后利用下式获得单个图注意力层的输出
[0046][0047]
其中σ(
·
)为激活函数,k为注意力数目。gat输出层通过对多头注意力取平均值得到最终结果,即样本所属工作模式
[0048][0049]
进一步地,本发明还提出了具体实施例进行仿真验证说明:
[0050]
场景说明:
[0051]
对抗场景如图2所示。图2(a)、(b)分别表示2个mfr在某一波束驻留时间段内发射的脉冲序列,图2(c)表示某无人机可能接收的交错脉冲序列,经过处理后得到如图2(d)、(e)所示的信号样本。在实际场景中,这些信号样本可能存在缺陷,其中脉冲丢失如图1(d)
中斜线填充框所示;干扰脉冲如图2(e)中最左边的填充框所示;测量噪声如图2(e)中横线填充框所示。
[0052]
以具有搜索、捕获、非自适应跟踪、距离分辨、跟踪保持等五种模式的“水星”雷达为例。水星雷达采用雷达短语表达工作模式,每种工作模式对应的雷达短语如表2所示。
[0053]
表2mfr工作模式及其对应的雷达短语
[0054][0055]
如表2所示,一个雷达短语ph包含4个雷达字
[0056]
ph=wa,wb,wc,wd,1 a,b,c,d 9
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0057]
一个雷达字w具有若干个脉冲
[0058]
w=p1,,p
l
,,p
l
,1 l l
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0059]
由于非合作方通常只能通过分析mfr信号特征来推测其意图,而载频(radio frequency,rf)、脉宽(pulse width,pw)、脉冲重复间隔(pulse repeat interval,pri)能提供许多有关mfr状态的关键信息。因此将脉冲表述为
[0060]
p=rf,pw,pri
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0061]
其中rf、pw、pri分别为rf、pw、pri。此时雷达短语可重写为
[0062][0063]
其中表示第k个雷达字中第lk个脉冲的rf。由于本发明引入无人机集群截获mfr信号,接收端全局信号样本为
[0064][0065]
其中表示无人机n接收的第m个雷达短语。
[0066]
最后,本发明提出了一种mfr工作模式识别方法f(
·
),即一种基于平滑图信号的多功能雷达工作模式识别方法
[0067][0068]
其中为无人机n接收的第m个雷达短语的分类结果。
[0069]
仿真场景设mfr数目nr=3、无人机数目nu=100,无人机处于任一mfr波束内即认为信号接收成功。本发明假设各mfr雷达字参数如表3所示。为降低实验结果的偶然性偏差,本发明规定在每次仿真中,各mfr均从最大参数范围内随机选定特征参数的子区间,特征参数指rf、pw和pri,并将该子区间作为该次仿真参数范围。其中随机变量均服从均匀分布。另外,为使各雷达字时长基本相同,令雷达字w
1-w3均包含30个脉冲,w
4-w6均包含40个脉冲,w
7-w9均包含50个脉冲。
[0070]
表3mfr雷达字参数设置
[0071][0072]
令som每行、列簇数目r=c=25,为减少不必要的运算,主簇、邻居簇的连接比例r
main
=r
vice
=0.01,邻居簇数目nn=4。gat网络结构按顺序为dropout层、图注意力层(注意力数目k=8,输出特征维度f
′
=20)、elu、dropout层、图注意力层(k=1,f
′
=15)、elu、softmax,其中dropout比例均为0.2。
[0073]
为模拟实际环境,仿真考虑了3类样本缺陷,如表4所示。由于pri是相邻两脉冲到达时间(time ofarrival,toa)的差分值,因此本发明通过对toa添加测量噪声以影响pri。测量噪声服从均值为0,标准差如表4所示的高斯分布。
[0074]
表4不同场景参数设置
[0075][0076]
为讨论所述基于平滑图信号的多功能雷达工作模式识别方法在监督数据较少时
的识别效果,仿真了每种类别监督数据数目ns=1,2,3,4,5,10,15,20,25的情况。为讨论样本缺陷对识别结果的影响,分别对表4中4种场景进行实验。每次仿真截获信号样本数约为3500个,不平衡度(样本数最多与最少的类别的平均样本数比例)约为10:1,采用准确率、f1值(常用于类别不平衡场景)作为评价指标。上述每种情况都进行100次仿真实验并取其结果平均值,如图3所示。由图可知,各场景下准确率和f1值均随ns增加而增长,因为gat训练过程的稳定性得到改善。ns达到一定值后,增长趋于平缓。
[0077]
对于场景1,如图3(a)所示。当ns=15时,即监督数据数目占比约为6.43%,所述基于平滑图信号的多功能雷达工作模式识别方法的准确率为96.67%,而许多相关方法需取ns≥980才能保证准确率达到这一水平。另外,当ns=25时,所述基于平滑图信号的多功能雷达工作模式识别方法的f1值为98.01%,相关文献仿真了具有同等不平衡度的场景并实现了同等识别效果,但其取ns=50000,同时,本发明仿真中共有15种类别样本,而该文献为6种。
[0078]
如图3所示,随着样本缺陷愈发严重,生成图信号和gat训练过程受干扰程度也随之升高,导致准确率和f1值均呈下降趋势。但即使在场景4中,所述基于平滑图信号的多功能雷达工作模式识别方法仍能取得81.27%准确率和79.2%f1值,说明本发明能够克服一定程度的样本缺陷。
[0079]
以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1