一种示教型智能巡检系统
1.本实用新型涉及巡检系统领域,具体涉及一种示教型智能巡检系统。
背景技术:
2.在立体仓库、立体车库、各类排柜、多层蓄电池架等成排布置的仓库(柜、架等)应用场景中,通常由于仓位(工位)多,工作空间狭窄,且部分应用场景中仓位(工位)工作高度较高,对仓位(工位)开展人工巡检与巡查难度大、工作量大、风险高。
3.专利cn208444335u公开了一种巡检系统,采用若干巡检机器人,实现了对配电房和库房等场所的智能巡检。但是其存在巡检过程不可示教,同时没有兼具远程自动和手动控制巡检模式。
技术实现要素:
4.为解决上述现有技术的不足,本实用新型提供了一种可示教型智能巡检系统,包括示教器、现场控制器、巡检机构和被巡检对象,所述巡检机构包括x轴、y轴、x轴驱动电机、y轴驱动电机,以及设于x轴/y轴上的巡检仪。
5.所述x轴驱动电机用于驱动巡检仪在x轴方向上的移动。
6.所述y轴驱动电机用于驱动巡检仪在y轴方向上的移动。
7.巡检机构设于被巡检对象的一侧,现场控制器与x轴驱动电机、y轴驱动电机和巡检仪电性连接,现场控制器用于根据指令控制巡检仪移动至被巡检对象的指定仓位/工位,并控制巡检仪采集物品参数。
8.示教器用于演示巡检操作、并显示采集数据。
9.作为实用新型的优选方案之一,所述巡检机构中,x轴和y轴均设有原点开关和极限开关,原点开关用于限定巡检仪的起步位置,极限开关用于限定巡检仪的端点位置。
10.作为实用新型的优选方案之一,所述示教器还用于向现场控制器发送控制指令,控制x轴驱动电机或y轴驱动电机运行。
11.作为实用新型的优选方案之一,所述巡检机构为两轴或三轴巡检机构,所述三轴巡检机构还包括z轴和z轴驱动电机,z轴驱动电机用于驱动巡检仪在z轴方向上的移动。
12.作为实用新型的优选方案之一,还包括现场通讯终端、云平台和远程终端,所述巡检仪包括巡检数据采集模块,所述现场通讯终端与巡检数据采集模块电性连接,远程终端通过云平台与现场通讯终端通讯连接。
13.作为实用新型的优选方案之一,所述现场控制器还包括第一存储单元,所述第一存储单元用于存储当前被巡检对象仓位/工位的x轴与y轴的坐标参数并上传至现场通讯终端。
14.作为实用新型的优选方案之一,所述现场通讯终端还包括处理器和第二存储单元,所述处理器用于分析整合现场控制器上传的坐标参数和数据采集模块上传的物品参数,形成巡检参数,第二存储单元用于存储巡检参数并上传至云平台。
15.作为实用新型的优选方案之一,所述云平台,所述云平台设有第三存储单元,用于接收和存储现场通讯终端上传的巡检参数并供远程终端查看。
16.作为实用新型的优选方案之一,所述第三存储单元还用于存储巡检策略,所述现场控制器还用于根据所述巡检策略自动开展巡检工作。
17.作为实用新型的优选方案之一,所述远程终端设有输入单元,输入单元供用户输入巡检信息;所述云平台还设有检索单元,所述检索单元用于检索用户输入的巡检信息并下发指令给现场控制器进行巡检。
18.作为实用新型的优选方案之一,所述远程终端为一个或多个。
19.相比于现有技术,本实用新型至少具备以下有益效果:
20.(1)兼具远程手动巡检和远程自动巡检两种功能,且能够实现仓位/工位的示教操作与记录,尤其适用于仓位/工位不规则分布的应用场合。
21.(2)通过两轴或三轴巡检机构,能对多层仓库(柜、架等)内的物品开展精准巡检操作,将巡检仪深入仓位/工位内部进行巡检,提高了系统巡检能力,同时能够根据输入的指定参数进行专项巡检。
22.(3)系统设定的巡检策略可通过云平台实现远程动态调整。
附图说明
23.下面结合附图对本实用新型做进一步的说明:
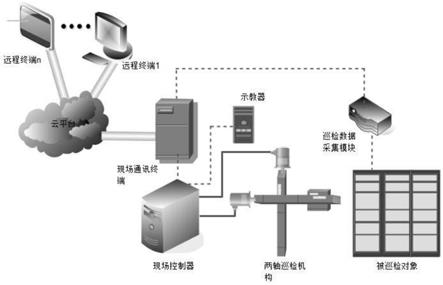
24.图1为示教型智能巡检系统总体框图。
25.图2为两轴巡检机构结构框图;
[0026]1‑
x轴驱动电机、2
‑
y轴驱动电机、3
‑
x轴、4
‑
y轴、5
‑
巡检仪、6
‑
x轴原点开关、7
‑
x轴极限开关、8
‑
y轴原点开关、9
‑
y轴极限开关。
具体实施例
[0027]
以下通过特定的具体实施例说明本实用新型的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本实用新型的其他优点与功效。本实用新型还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本实用新型的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
[0028]
以下结合具体实施方式,对本实用新型所述蓄电池维护系统工作过程进一步阐释:
[0029]
如图1所示,本实用新型示教型智能巡检系统包括示教器、现场控制器、两轴巡检机构、现场通讯终端、云平台和远程终端。
[0030]
两轴巡检机构设于被巡检对象一侧,其上安装有巡检仪,巡检仪5上设有巡检数据采集模块。
[0031]
示教器用于巡检演示、显示采集数据以及向现场控制器发送控制指令。
[0032]
现场控制器用于根据控制指令控制巡检仪移动制备巡检对象的指定仓位/工位并控制巡检仪采集物品参数,存储当前被巡检对象仓位/工位的坐标参数并上传至现场通讯终端。
[0033]
现场通讯终端与巡检数据采集模块电性连接,用于分析整合现场控制器上传的坐标参数和数据采集模块上传的物品参数(物品名称、生产日期、入库时间等),形成巡检参数,存储后并上传至云平台。
[0034]
云平台用于接收和存储现场通讯终端上传的巡检参数并供远程终端查看。同时云平台还存储有巡检策略,现场控制器根据巡检策略自动开展巡检工作。
[0035]
用户可通过远程终端远程的输入单元输入巡检信息,经云平台检索该巡检信息后下发指令给现场控制器进行巡检。多个远程终端可同时操作或查看。
[0036]
如图2所示,本系统中巡检机构采用两轴设计,包括x轴驱动电机1、y轴驱动电机2、x轴3、y轴4、巡检仪5、x轴原点开关6、x轴极限开关7、y轴原点开关8、y轴极限开关9。
[0037]
x轴驱动电机1和y轴驱动电2用于驱动巡检仪在x轴3和y轴4方向上移动,x轴原点开关6和y轴原点开关8限定巡检仪的起步位置,x轴极限开关7和y轴极限开关9限定巡检仪的端点位置。现场控制器根据指令控制x轴驱动电机1或y轴驱动电机2运行。
[0038]
在系统进行巡检工作时,系统以云平台为控制中心,通过云平台将巡检指令发送到工作现场,现场控制器通过与云平台的通讯,获取现场控制命令,现场控制器根据控制命令驱动电机运行,驱动两轴巡检机构到指定仓位/工位进行巡检,现场通讯终端将现场巡检数据(坐标参数、视频、照片、物品名称、生产日期、入库时间等各类检测数据)上传至云平台,从而代替人工的巡检工作。若检测设备工作台在运行过程中碰到x轴原点开关6或x轴极限开关7或y轴原点开关8或y轴极限开关9时,则相应驱动电机立刻停止运行。
[0039]
在示教工作时,在示教前先将巡检设备工作台运行到x轴原电开关6、y轴原点开关8位置,再通过示教器向现场控制器发送控制命令,驱动电机运行,使得巡检设备工作台到达向目标仓位/工位,在此过程中现场控制器记录下目标仓位/工位距离工作原点的距离数据并保存起来,用于后期巡检定位控制。
[0040]
值得注意的是,本实用新型还可在巡检机构中增加一个第三轴(z轴),同样由现场控制器实现该轴定位控制,该轴垂直于x轴、y轴布置,与x轴、y轴形成三维垂直布置,布置z轴后,经三轴的组合定位控制可实现将巡检仪伸入仓位\工位内部进行巡检与检测,以进一步提高系统巡检能力。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1