一种实时获取移动赛艇训练时数据的方法及系统与流程
1.本发明涉及互联网技术领域,具体涉及一种实时获取移动赛艇训练时数据的方法及系统。
背景技术:
2.体育运动训练传统都是依靠教练的经验分享,从历届冠军获得者身上做分析,并取得冠军参数做对比,在运动员训练的过程中无法直观、实时的获取到每一项利于教练做判断的数据,而只能通过目测动作以及和其他运动员配合的协调性,等到某时段的训练或者赛事结束后才能总结做调整。移动赛艇训练对优秀队员的日常训练也是必不可少的,它经常被用于改进技术、发展有氧能力和恶劣气候下的调节训练。但是在训练过程中,教练员是无法实时、精确、直观的掌握运动员划船过程中每一项具体数据的,也就很难根据效果对训练方式做出相应的调整。
技术实现要素:
3.为解决现有技术中的问题,本发明提供一种实时获取移动赛艇训练时数据的方法及系统,通过在移动赛艇主体设置船体传感器组合模块和船体控制器,在船桨设置桨杆传感器组合模块和桨杆控制器,船体传感器组合模块和桨杆控制器能够实时采集船体角度、船体速度、滑座速度、桨力、脚蹬力、船桨角度等数据,桨杆控制器能够实时接收和分析桨杆传感器组合模块采集到的数据并发送至船体控制器,船体控制器能够综合分析整理船体传感器组合模块采集到的数据和桨杆控制器发送的数据,最后将分析结果上传至云服务器,能够在教练员的智能终端实时显示移动赛艇训练时的各种具体数据,大幅度提高了移动赛艇训练效率,解决了现有技术中移动赛艇训练教练员无法实时、精确、直观的掌握运动员划船过程中每一项具体数据、难以根据效果对训练方式做出相应调整的问题。
4.本发明的一种实时获取移动赛艇训练时数据的方法包括如下步骤:
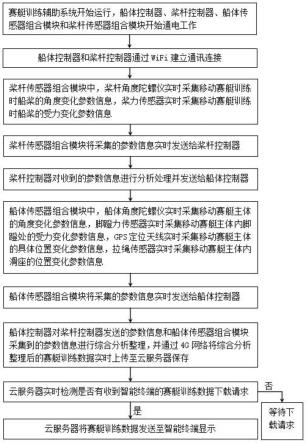
5.步骤1:赛艇训练辅助系统开始运行,船体控制器、桨杆控制器、船体传感器组合模块和桨杆传感器组合模块开始通电工作;
6.步骤2:船体控制器和桨杆控制器通过wifi建立通讯连接;
7.步骤3:桨杆传感器组合模块中,桨杆角度陀螺仪实时采集移动赛艇训练时船桨的角度变化数据,桨力传感器实时采集移动赛艇训练时船桨的受力变化数据;
8.步骤4:桨杆传感器组合模块将采集的数据实时发送给桨杆控制器;
9.步骤5:桨杆控制器对收到的数据进行分析处理并发送给船体控制器;
10.步骤6:船体传感器组合模块中,船体角度陀螺仪实时采集移动赛艇主体的角度变化数据,脚蹬力传感器实时采集移动赛艇主体内脚蹬处的受力变化数据,gps定位天线实时采集移动赛艇主体的具体位置变化数据,拉绳传感器实时采集移动赛艇主体内滑座的位置变化数据;
11.步骤7:船体传感器组合模块将采集的数据实时发送给船体控制器;
12.步骤8:船体控制器对桨杆控制器发送的数据和船体传感器组合模块采集到的数据进行综合分析整理,并通过4g网络将综合分析整理后的赛艇训练数据实时上传至云服务器保存;
13.步骤9:云服务器实时检测是否有收到智能终端的赛艇训练数据下载请求;
14.步骤10:当云服务器实时检测到有收到智能终端的赛艇训练数据下载请求时,云服务器将赛艇训练数据发送至智能终端显示。
15.本发明作进一步改进,在所述步骤3和步骤6中,所述桨杆角度陀螺仪、所述桨力传感器、所述船体角度陀螺仪、所述脚蹬力传感器、所述gps定位天线、所述拉绳传感器的数据采集频率均为50hz。
16.本发明作进一步改进,在所述步骤1中,所述船体控制器和所述船体传感器组合模块设置于移动赛艇主体,所述船体控制器和所述船体传感器组合模块电连接,所述桨杆传感器组合模块和所述桨杆控制器设置于船桨内,所述桨杆传感器组合模块和所述桨杆控制器电连接。
17.本发明作进一步改进,所述船体控制器内设有船体wifi单元和船体4g单元,所述桨杆控制器设有桨杆wifi单元,在所述步骤2中,船体wifi单元与桨杆wifi单元通讯连接,在所述步骤8中,船体4g单元与云服务器建议通讯连接。
18.本发明作进一步改进,在所述步骤6中,所述拉绳传感器采集的滑座位置变化数据采用正交编码的方式发送给所述船体控制器。
19.本发明作进一步改进,在所述步骤6中,所述脚蹬力传感器内设有模数转换器,用于实时采集移动赛艇主体内脚蹬处的受力变化数据。
20.本发明作进一步改进,在所述步骤9中,当云服务器实时检测没有收到智能终端的赛艇训练数据下载请求时,云服务器保持等待下载请求的状态。
21.本发明作进一步改进,在所述步骤1-10中,所述船体控制器和所述桨杆控制器外壳均设有防水密封层。
22.本发明作进一步改进,所述船体控制器内存储有用于作为训练参考的国内外优秀运动员的船体角度、船体速度、滑座速度、桨力、脚蹬力、船桨角度的数据。
23.本发明还提供一种系统,用于实现上述实时获取移动赛艇训练时数据的方法,包括:
24.船体控制器,用于对桨杆控制器发送的数据和船体传感器组合模块采集到的数据进行综合分析整理,并通过4g网络将综合分析整理后的赛艇训练数据实时上传至云服务器保存;
25.船体传感器组合模块,包括船体角度陀螺仪、脚蹬力传感器、gps定位天线和拉绳传感器,船体角度陀螺仪用于实时采集移动赛艇主体的角度变化数据,脚蹬力传感器用于实时采集移动赛艇主体内脚蹬处的受力变化数据,gps定位天线用于实时采集移动赛艇主体的具体位置变化数据,拉绳传感器用于实时采集移动赛艇主体内滑座的位置变化数据;
26.桨杆控制器,对桨杆传感器组合模块采集的数据进行分析处理并发送给船体控制器;
27.桨杆传感器组合模块,包括桨杆角度陀螺仪和桨力传感器,桨杆角度陀螺仪用于实时采集移动赛艇训练时船桨的角度变化数据,桨力传感器用于实时采集移动赛艇训练时
船桨的受力变化数据;
28.云服务器,用于接收和保存船体控制器综合分析整理后的赛艇训练数据,用于将赛艇训练数据发送至智能终端显示;
29.智能终端,用于下载云服务器的赛艇训练数据并显示。
30.本发明的有益效果是:本发明提供一种实时获取移动赛艇训练时数据的方法及系统,通过在移动赛艇主体设置船体传感器组合模块和船体控制器,在船桨设置桨杆传感器组合模块和桨杆控制器,船体传感器组合模块和桨杆控制器能够实时采集船体角度、船体速度、滑座速度、桨力、脚蹬力、船桨角度等数据,桨杆控制器能够实时接收和分析桨杆传感器组合模块采集到的数据并通过桨杆wifi单元发送至船体控制器,船体控制器能够综合分析整理船体传感器组合模块采集到的数据和桨杆控制器发送的数据,最后将分析结果通过船体4g单元上传至云服务器存储,教练员的智能终端能够在云服务器实时下载和显示移动赛艇训练时的各种具体数据,便于教练员结合目前运动员实时训练状态对训练方式做出相应的调整,大幅度提高了移动赛艇训练效率,而且不局限于赛艇荡桨池或各种户外训练环境,都能够精准实时的获取移动赛艇训练时的各种具体数据,解决了现有技术中移动赛艇训练教练员无法实时、精确、直观的掌握运动员划船过程中每一项具体数据、难以根据效果对训练方式做出相应调整的问题。
附图说明
31.为了更清楚地说明本技术或现有技术中的方案,下面将对实施例或现有技术描述中所需要使用的附图作一个简单介绍,显而易见地,下面描述中的附图是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
32.图1为本发明的一种实时获取移动赛艇训练时数据的方法流程图。
具体实施方式
33.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术技术领域的技术人员通常理解的含义相同;本文中在申请的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术;本技术的说明书和权利要求书及上述附图说明中的术语“包括”和“具有”以及它们的任何变形,意图在于覆盖不排他的包含。本技术的说明书和权利要求书或上述附图中的术语“第一”、“第二”等是用于区别不同对象,而不是用于描述特定顺序。
34.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
35.为了使本技术领域的人员更好地理解本技术方案,下面将结合附图,对本技术实施例中的技术方案进行清楚、完整地描述。
36.请参见图1,本发明的一种实时获取移动赛艇训练时数据的方法包括如下步骤:
37.步骤1:赛艇训练辅助系统开始运行,船体控制器、桨杆控制器、船体传感器组合模
块和桨杆传感器组合模块开始通电工作;
38.步骤2:船体控制器和桨杆控制器通过wifi建立通讯连接;
39.步骤3:桨杆传感器组合模块中,桨杆角度陀螺仪实时采集移动赛艇训练时船桨的角度变化数据,桨力传感器实时采集移动赛艇训练时船桨的受力变化数据;
40.步骤4:桨杆传感器组合模块将采集的数据实时发送给桨杆控制器;
41.步骤5:桨杆控制器对收到的数据进行分析处理并发送给船体控制器;
42.步骤6:船体传感器组合模块中,船体角度陀螺仪实时采集移动赛艇主体的角度变化数据,脚蹬力传感器实时采集移动赛艇主体内脚蹬处的受力变化数据,gps定位天线实时采集移动赛艇主体的具体位置变化数据,拉绳传感器实时采集移动赛艇主体内滑座的位置变化数据;
43.步骤7:船体传感器组合模块将采集的数据实时发送给船体控制器;
44.步骤8:船体控制器对桨杆控制器发送的数据和船体传感器组合模块采集到的数据进行综合分析整理,并通过4g网络将综合分析整理后的赛艇训练数据实时上传至云服务器保存;
45.步骤9:云服务器实时检测是否有收到智能终端的赛艇训练数据下载请求;
46.步骤10:当云服务器实时检测到有收到智能终端的赛艇训练数据下载请求时,云服务器将赛艇训练数据发送至智能终端显示。
47.在本实施例中,桨杆控制器实时接收和分析桨杆传感器组合模块采集到的数据并通过桨杆wifi单元发送至船体控制器,船体控制器综合分析整理船体传感器组合模块采集到的数据和桨杆控制器发送的数据,并通过船体4g单元上传至云服务器存储,教练员的智能终端能够在云服务器实时下载和显示移动赛艇训练时的各种具体数据,包括船体角度、船体速度、滑座速度、桨力、脚蹬力、船桨角度等,便于教练员结合目前运动员实时训练状态对训练方式做出相应的调整,大幅度提高了移动赛艇训练效率,而且不局限于赛艇荡桨池或各种户外训练环境,都能够精准实时的获取移动赛艇训练时的各种具体数据。
48.在本实施例中,船体角度陀螺仪设置于移动赛艇主体内的滑座处,脚蹬力传感器设置于移动赛艇主体内的脚蹬处,gps定位天线设置于移动赛艇主体的侧边上,桨杆角度陀螺仪和桨力传感器均设置于船桨内部。
49.本实施例中,船体角度陀螺仪用于记录移动赛艇训练时移动赛艇主体的角度变化数据并发送给船体控制器,脚蹬力传感器用于记录移动赛艇训练时移动赛艇主体内脚蹬受力变化数据并发送给船体控制器,gps定位天线用于记录移动赛艇训练时移动赛艇主体具体位置经纬度变化数据并发送给船体控制器,分析出船体的速度,桨杆角度陀螺仪用于记录移动赛艇训练时船桨的角度变化数据并发送给桨杆控制器,桨力传感器用于记录移动赛艇训练时船桨受力变化数据并发送给桨杆控制器,拉绳传感器用于记录移动赛艇训练时移动赛艇主体内滑座的位置变化数据并发送给船体控制器,分析出滑座的速度,在运动员划桨时,滑座是会前后运动的,捕捉该参数能够更准确的判断运动员的实际状态。
50.请参见图1,在步骤3和步骤6中,桨杆角度陀螺仪、桨力传感器、船体角度陀螺仪、脚蹬力传感器、gps定位天线、拉绳传感器的数据采集频率均为50hz。在本实施例中,船体传感器组合模块和桨杆传感器组合模块对数据采集上传方式是每秒50次高频数据采集,并实时发送给船体控制器和桨杆控制器,能够更加精准的反映出运动员的实时状态。
51.请参见图1,在本实施例中,船体控制器和船体传感器组合模块设置于移动赛艇主体,船体控制器和船体传感器组合模块电连接,桨杆传感器组合模块和桨杆控制器设置于船桨内,桨杆传感器组合模块和桨杆控制器电连接。
52.请参见图1,在本实施例中,船体控制器内设有船体wifi单元和船体4g单元,桨杆控制器设有桨杆wifi单元,在步骤2中,船体wifi单元与桨杆wifi单元通讯连接,在步骤8中,船体4g单元与云服务器建议通讯连接。本实施例中,船体wifi单元和桨杆wifi单元的主要作用就是把桨杆控制器分析完的数据发送给船体控制器,船体4g单元主要用于船体控制器与云服务器建立通迅。
53.请参见图1,在步骤6中,拉绳传感器采集的滑座位置变化数据采用正交编码的方式发送给船体控制器。正交编码是一种典型编码形式,具有良好的抗噪性能,能有效消除脉冲边缘振荡造成的干扰,在测速时能有效提高准确性。在本实施例中,用于更精准的采集和分析出滑座的移动速度。
54.请参见图1,在步骤6中,脚蹬力传感器内设有模数转换器,用于实时采集移动赛艇主体内脚蹬处的受力变化数据。模数变换器,把模拟量转换为数字量的装置,在计算机控制系统中,须经各种检测装置,以连续变化的电压或电流作为模拟量,随时提供被控制对象的有关参数(如速度、压力、温度等)而进行控制。在本实施例中,能够精准的采集到脚蹬处的受力变化数据。
55.请参见图1,在步骤9中,当云服务器实时检测没有收到智能终端的赛艇训练数据下载请求时,云服务器保持等待下载请求的状态,能够更快速的响应智能终端的下载请求。
56.请参见图1,在步骤1-10中,船体控制器和桨杆控制器外壳均设有防水密封层,该防水层用于保证船体控制器和桨杆控制器的稳定运行,防止赛艇训练时进水,提高了使用寿命。
57.请参见图1,船体控制器内存储有用于作为训练参考的国内外优秀运动员的船体角度、船体速度、滑座速度、桨力、脚蹬力、船桨角度的数据。本实施例中,船体分析单元内存储的数据是有限的,主要是一些优秀的数据,而且能够对这些数据进行定时更新,更精准的辅助移动赛艇训练。
58.请参见图1,本发明还提供一种系统,用于实现上述实时获取移动赛艇训练时数据的方法,包括:
59.船体控制器,用于对桨杆控制器发送的数据和船体传感器组合模块采集到的数据进行综合分析整理,并通过4g网络将综合分析整理后的赛艇训练数据实时上传至云服务器保存;
60.船体传感器组合模块,包括船体角度陀螺仪、脚蹬力传感器、gps定位天线和拉绳传感器,船体角度陀螺仪用于实时采集移动赛艇主体的角度变化数据,脚蹬力传感器用于实时采集移动赛艇主体内脚蹬处的受力变化数据,gps定位天线用于实时采集移动赛艇主体的具体位置变化数据,拉绳传感器用于实时采集移动赛艇主体内滑座的位置变化数据;
61.桨杆控制器,对桨杆传感器组合模块采集的数据进行分析处理并发送给船体控制器;
62.桨杆传感器组合模块,包括桨杆角度陀螺仪和桨力传感器,桨杆角度陀螺仪用于实时采集移动赛艇训练时船桨的角度变化数据,桨力传感器用于实时采集移动赛艇训练时
船桨的受力变化数据;
63.云服务器,用于接收和保存船体控制器综合分析整理后的赛艇训练数据,用于将赛艇训练数据发送至智能终端显示;
64.智能终端,用于下载云服务器的赛艇训练数据并显示。
65.本实施例中,云服务器主要用于存储和传输数据,船体控制器分析完毕的数据都会实时上传至云服务器,云服务器保存后提供给各类智能终端下载播放,例如手机、平板或者电脑等,教练员的智能终端能够在云服务器实时下载和显示移动赛艇训练时的各种具体数据,包括船体角度、船体速度、滑座速度、桨力、脚蹬力、船桨角度等,便于教练员结合目前运动员实时训练状态对训练方式做出相应的调整。
66.由上可知,本发明的有益效果是:本发明提供一种实时获取移动赛艇训练时数据的方法及系统,通过在移动赛艇主体设置船体传感器组合模块和船体控制器,在船桨设置桨杆传感器组合模块和桨杆控制器,船体传感器组合模块和桨杆控制器能够实时采集船体角度、船体速度、滑座速度、桨力、脚蹬力、船桨角度等数据,桨杆控制器能够实时接收和分析桨杆传感器组合模块采集到的数据并通过桨杆wifi单元发送至船体控制器,船体控制器能够综合分析整理船体传感器组合模块采集到的数据和桨杆控制器发送的数据,最后将分析结果通过船体4g单元上传至云服务器存储,教练员的智能终端能够在云服务器实时下载和显示移动赛艇训练时的各种具体数据,便于教练员结合目前运动员实时训练状态对训练方式做出相应的调整,大幅度提高了移动赛艇训练效率,而且不局限于赛艇荡桨池或各种户外训练环境,都能够精准实时的获取移动赛艇训练时的各种具体数据,解决了现有技术中移动赛艇训练教练员无法实时、精确、直观的掌握运动员划船过程中每一项具体数据、难以根据效果对训练方式做出相应调整的问题。
67.以上之具体实施方式为本发明的较佳实施方式,并非以此限定本发明的具体实施范围,本发明的范围包括并不限于本具体实施方式,凡依照本发明所作的等效变化均在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1