确定路网段上的污染物、噪声排放、道路安全参数的方法与流程
1.本发明涉及路网段的污染物和/或噪声排放和/或道路安全参数的表征。
背景技术:
2.根据世界卫生组织(who),每天约有18000人死于不良空气质量,这使得该估算达每年约650万人死亡。空气污染也是重大财政问题:根据参议院调查委员会在2015年7月评估的,考虑到污染造成的健康损害及其对建筑物、生态系统和农业的影响,在法国空气污染估计总成本在每年680亿至970亿欧元之间。
3.尽管公共当局采取的许多措施以及在该领域中的技术进步,但交通运输部门仍然是主要的排放源。在所有模式中,约50%的全球氮氧化物(nox)排放量和约10%的pm2.5(直径小于2.5μm的颗粒物)排放量来自交通运输。仅道路交通就对交通运输相关排放做出了重大贡献,其nox排放量占58%且pm2.5排放量占73%。
4.这些排放主要归因于三个因素:废气排放、腐蚀排放和蒸发排放。虽然重型卡车是主要污染物排放者,但更多出现在人口密集市区的乘用车对市民暴露在不良空气质量中的影响最大。
5.当地为交通运输管理而采取的措施(如更好的交通运输规划和鼓励模式转换)以及逐步更新车队,有助于限制城市和市区道路交通运输的废气排放。事实上,在过去十年里,全世界的道路交通运输活动增加了四分之一,但是nox和颗粒物排放分别增加了5%和减少了6%。尽管有了这些改善,但在许多城市,污染水平仍然超过who设定的阈值。
6.当前,负责交通运输政策实际应用的机构没有使他们能够了解道路开发在污染物排放、噪声和道路安全方面的影响的必需工具。诸如更改限速、设立交通灯交叉路口或减速带等决策对车辆的速度和加速度(因此对它们的污染物和噪声排放)有直接且重大的影响。迄今,这些影响是未知的,并且因此诸城市没有将它们纳入考虑。
7.这种知识的缺乏与收集允许对这些影响进行评估的真实代表性数据的难度密切相关。当今,新数字技术为解决这一问题提供了机会。的确,更容易地收集大量的真实移动数据(例如,数千个体驾驶员每日出行的gps或即全球定位系统类型的记录,也称为fcd或即浮动车数据)是可能的。
8.文献表明,当今根据gps信号来表征排放(l.thibault,p.degeilh,o.lepreux,l.voise,g.alix,g.corde,“a new gps
‑
based method to estimate real driving emissions(估计实际驾驶排放的基于gps的新方法)”,ieee第19届智能交通运输系统国际会议(international conference on intelligent transportation systems),2016年)、噪声(c.asensio,j.m.l
ó
pez,r.pag
á
n,i.pav
ó
n,和m.ausejo,“gps
‑
based speed collection method for road traffic noise mapping(用于道路交通噪声地图的基于gps的速度采集方法)”,transp.res.part d transp.environ.,卷14,no.5,第360
‑
366页,2009)和地面附着力(r.vaiana等人,“driving behavior and traffic safety:an acceleration
‑
based safety evaluation procedure for smartphones(驾驶行为和交通
安全:针对智能手机的基于加速度的安全评估程序)”,mod.appl.sci.,卷8,no.1,第88页,2014)。
9.以下模型尤其是已知的:综合模式排放模型(cmem)(m.barth,“the comprehensive modal emission model(cmem)for predicting light
‑
duty vehicle emissions(用于预测轻型车辆排放的综合模式排放模型(cmem))”,transportation planning and air quality iv:persistent problems and promising solutions(交通运输规划和空气质量iv:持久性问题和有希望的解决方案),2000,第126
‑
137页),乘用车和重型车排放模型(phem)(s.hausberger、m.rexeis、m.zallinger和r.luz,“phem user guide for version 10(phem用户指南第10版)”,tug/fvt rep.,第1
‑
57页,2010)和美国弗吉尼亚理工大学微观能源和排放模型(vt micro)(h.rakha、k.ahn和a.trani,“development of vt
‑
micro model for estimating hot stabilized light duty vehicle and truck emissions(用于估算热稳定轻型车辆和卡车排放的vt微型模型的开发),transp.res.part d transp.environ.,卷9,no.1,第49
‑
74页,2004)。
10.然而,这几个现有空气质量监测工具没有允许准确地估计污染物和/或噪声排放的比例,或实际使用中对道路安全的影响,也没有精确地确定它们在空间中的位置。事实上,在这些方法中,排放评估是基于数公里路段上的平均速度的,如在copert方法(computer program to calculate emissions from road transports(计算道路交通运输排放的计算机程序),由欧洲环境署资助的项目,http://emisia.com/products/copert)中。因而,这些方法没有考虑这些路段上的现有加速/减速阶段,而这些阶段会产生高污染物和/或噪声排放并可对道路安全有影响,尤其是由于车辆缺少地面附着力。
11.此外,车辆的技术特性没有被正确地纳入考虑,尤其是最近的柴油车,这会导致严重错误。
12.因此,在没有具体的工具来评估在污染、噪声和/或道路安全方面的影响的情况下,城市很难在道路基础设施开发方面做出正确的决策。
13.考虑到缺乏此类工具,一些社区直接对基础设施或路网法规进行修改,并且他们任选地对污染物和/或噪声排放和/或道路安全方面的风险进行后验研究。
14.在进行研究时,这一后验研究在某些情况下是定量的,而在另一些情况下只是定性的。
15.在定量时,污染物/噪声排放和/或道路安全风险措施随后结合这些变更来执行。然而,这些措施仍然非常局部,并且它们没有允许精确地定义对路网段的影响,而且它们明显没有允许评估局部变化。此外,这些措施是昂贵的。它们代表了社区的显著成本。
16.在定性时,研究被限于基于用户和当地居民评论的办法。因此,这一办法是主观且不可靠的。
17.不管后验研究是如何进行的,基础设施改造都是非常昂贵的。现在,进行基础设施改造和任选地进行后验研究涉及社区的显著成本。如果研究表明基础设施没有改善任何情况或甚至恶化了情况,则可能需要进行新的改造。因此,在找到令人满意的解决方案之前,采用这种试错法可能会产生非常高的成本。此外,所进行的研究不是精确的,并且它们很少能够评估改造对若干准则(例如,污染、噪声和道路安全)所带来的影响。
18.为了避免不必要的基础设施或法规以及不精确和不完整的研究,因此有必要能够
精确地确定路网段的污染物和/或噪声排放以及道路安全方面的风险,尤其是在对这些部分进行基础设施或法规更改的情况下,而无需事先物理地作出这些改造。
技术实现要素:
19.为了满足这些挑战,本发明涉及确定与路网段上车队的污染物和/或噪声排放和/或道路安全相关的物理参数的方法。该方法使用测量路网段上的位置、速度和/或海拔的至少一个装置。此外,它包括以下步骤,优选地由计算机装置来实现:
20.a)使用测量装置至少测量路网段上的位置、速度和/或海拔,并确定路网段上的速度剖面(profile),
21.b)根据这些车辆的特性和在步骤a)中确定的速度剖面,确定车队中每一辆车在路网段的至少一部分上的至少一个物理特性,
22.c)将车队应用于在上一步骤中确定的物理特性,以获得物理特性在该车队上的分布,
23.d)借助在步骤c)中获得的物理特性的分布来确定路网段的该部分上的物理参数。
24.本发明涉及一种确定与路网段上预定车辆的预定义车队的污染物和/或噪声排放和/或道路安全相关的物理参数的方法,该方法使用测量所述路网段上的位置、速度和海拔的至少一个装置。此外,该方法包括以下步骤:
25.a)使用所述至少一个测量装置至少测量所述路网段上的位置、速度和/或海拔,并确定所述路网段上的速度剖面,
26.b)根据所述预定车辆的特性和由此确定的速度剖面,来确定所述路网段的至少一部分上所述预定义车队的所述预定车辆中的每一者的至少一个物理特性,
27.c)将所述预定义车队应用于在前一步骤中确定的所述物理特性,以获得所述物理特性在所述预定义车队上的分布,
28.d)借助在步骤c)中获得的所述物理特性的所述分布来确定所述路网段的所述部分上的所述物理参数。
29.优选地,执行诸测得位置的空间聚集。
30.有利地,所述空间聚集包括校正诸测得位置以与所述路网段的诸位置相对应。
31.根据本发明的一实现,所述路网段被分成预定长度的分段,并且步骤b)、c)和d)是在所述预定长度的分段中的每一者上执行的。
32.根据本发明的优选实施例,在步骤d)中,通过聚集在步骤c)中获得的所述物理特性的所述分布来确定至少所述路网段上的所述物理参数。
33.优选地,在执行所述物理参数的分布的所述聚集时,所述物理参数被取为与预定分位数相对应的、所述物理特性的所述分布的值,该预定分位数优选地是第六十百分位数。
34.有利地,所述物理参数包括所述路网段的所述部分的nox排放量、pm2.5排放量、温室气体排放量、噪声排放和/或代表对道路安全的影响的变量,优选地代表对道路安全的影响的变量是与所述路网段的所述部分的附着力。
35.根据本发明的一实施例,所述物理特性包括所述路网段的所述部分上的每一预定车辆的nox排放量、pm2.5排放量、温室气体排放量、噪声排放和/或代表对道路安全的影响的变量,优选地代表对道路安全的影响的变量是所述预定车辆与所述路网段的所述部分的
附着力。
36.有利地,所述预定车辆的特性包括车辆质量、引擎类型和废气后处理类型。
37.在根据本发明的方法的变型中,应用交通流,所述交通流优选地包括根据所考虑的日期和当天的时间在所述路网段上的车流。
38.根据本发明的一实施例,所述物理参数被显示在道路图上,优选地借助智能手机、计算机、数字平板或计算机系统。
39.优选地,所述物理参数针对用户选择的配置被显示在道路图上,并且所述配置能包括要显示的所述物理参数、预定车辆的预定义车队、所述物理参数的灵敏度水平、所述预定分位数和/或所述交通流。
40.在本发明的变型中,为所述物理参数确定置信度参数。
41.在本发明的优选实施例中,在步骤b)中,对于每一预定车辆,采集预定车辆的相关于所述车辆的设计的至少一个特性,并且为所述车辆构建以下模型:
42.i)所述车辆的模型,其借助所述预定车辆的至少一个特性将至少所述速度剖面与所述引擎的扭矩和速度进行相关,
43.ii)所述引擎的模型,其借助所述预定车辆的至少一个特性将所述引擎的所述扭矩和所述速度与所述引擎的出口处的污染物和/或噪声排放进行相关;
44.iii)所述后处理系统的模型,其借助所述预定车辆的至少一个特性将所述引擎的出口处的污染物和/或噪声排放与所述后处理系统的出口处的污染物和/或噪声排放进行相关,
45.并且所述引擎的所述扭矩和所述速度是借助所述车辆模型和所述速度剖面来确定的;所述引擎的出口处的污染物和/或噪声排放是借助所述引擎模型以及所述引擎的所述扭矩和所述速度来确定的;并且所述车辆的污染物和/或噪声排放是借助所述后处理系统模型以及所述引擎的出口处的所述污染物和/或噪声排放来确定的,所述物理特性是后处理系统出口处的污染物和/或噪声排放。
46.本发明还涉及可从通信网络下载和/或记录在计算机可读介质上和/或处理器或服务器可执行的计算机程序产品,包括当所述程序在计算机、移动电话或计算机设备上执行时,用于实现根据以上特征中的任一者所述的方法的程序代码指令。
47.本发明还涉及根据上述特征之一的方法用于改造道路基础设施、扩展公共交通运输网和/或修改道路交通运输控制措施的用途。
附图说明
48.参考附图并对非限制性实施例的各示例的描述将清楚地理解根据本发明的设备和/或产品的其他特征和优势,在附图中:
49.图1示出了根据本发明的一实施例的方法的各步骤,
50.图2解说了根据本发明的示出物理特性的分布的直方图的示例,
51.图3示出了根据本发明的确定污染物排放的物理参数的步骤,
52.图4示出了根据本发明的方法在道路地图上的路网段上显示nox排放的第一示例,
53.图5示出了根据本发明的方法在道路地图上的路网段上显示nox排放的第二示例,该第二示例因增加了第二交通灯而不同于图4的示例,
54.图6示出了根据现有技术的copert方法与图4和5相同在道路地图上的路网段上显示nox排放的示例,以及
55.图7示出了根据本发明的方法的步骤b)的实施例。
具体实施方式
56.本发明涉及一种确定代表路网段上的预定车辆的预定义车队的污染物和/或噪声排放和/或道路安全的物理参数的方法。物理参数可以是,例如:
57.污染物排放:细颗粒物排放量(例如pm2.5)、nox排放量、温室气体排放量(例如co2)等,
58.噪声排放:以db(分贝)为单位的估计噪声水平,等等,或者
59.道路安全:车辆的地面附着力,以评估对道路安全的影响,等等。
60.这一方法的目标是确定路网段上的当前或用于改造的这些物理参数中的至少一者,例如,增加交通灯、增加环岛、更改最大限速、增加减速带或移除路网开发。
61.预定义车队可以是沿路网段行驶的当前车队辆。这可由用户根据行程历史记录和/或对所考虑区域中车队的现有知识来定义。预定义车队也可以是将来车队,以适用将来立法(禁止某些类别的车辆,例如最旧和/或污染最严重的车辆,例如仅限电动车进入)。
62.预定车辆是在预定义车队中使用的车辆。因此,它们取决于所考虑的车队并且它们可由该方法的用户来确定。因而,对于在路网段上行驶的每一预定车辆,预定义车队是车辆数或百分比分布。
63.该方法使用测量路网段上的位置、速度和/或海拔的至少一个装置。优选地,测量装置尤其可以是车辆车载或智能手机中的gps(全球定位系统)地理定位系统。这一测量装置允许至少测量路网段上车辆的位置、速度和海拔。因而,该测得数据代表已实现的行驶记录,称为fcd(浮动车数据)。优选地,在同一路网段上测量若干个位置、速度和海拔,以便具有更可靠的测得数据。优选地,为了给出数量级,执行至少100次行驶测量,每一行驶测量沿路网段的位置、速度和海拔,以便具有可靠的数据。
64.此外,该方法包括以下步骤,优选地由计算机装置来实现:
65.a)使用测量装置(例如,gps)至少测量路网段上的位置、速度和/或海拔,优选地借助在该路网段上行驶的若干车辆。换言之,在该路网段上行驶的车辆的位置、速度和/或海拔数据是使用该测量装置来记录的。随后确定路网剖面上的速度剖面,尤其是根据测得量的速度。例如,速度剖面可与针对路网段的每一点所记录的速度的平均值相对应。速度剖面被理解为沿路网段或其一部分的速度变化。每一位置、速度和海拔测量与在路网段实现的车辆行驶相对应,诸行驶是在不同时间(在不同时间意味着出发点的出发时间和/或到达点的到达时间不同,或者至少在该路网段上,对于两个不同的行驶,在两个不同的时间至少有一个交叉点)并针对同一或不同车辆实现的。使用不同车辆允许使数据多样化,并从而获得更可靠的速度剖面。
66.例如,速度剖面可通过在路网段的每个点处测得的速度的平均值来确定。速度剖面允许将沿路网段的加速和减速阶段纳入考虑,这使得能够提高污染物和噪声排放以及道路安全的精度。
67.速度剖面定义车辆在路网段的每一位置处的速度,并且该位置可由纬度和经度来
定义。
68.根据测得的海拔,例如通过确定在路网段的每个点处测得的海拔的平均值,来确定路网段的坡度变化也是可能的。将坡度变化纳入考虑允许进一步提高这一精度,尤其是当车辆在上坡,污染物和噪声排放高于无坡度道路部分时,或车辆在下坡,附着力丢失的风险增加并且道路安全因而降低时;
69.b)根据预定车辆的特性、所确定的速度剖面以及可能根据所确定的坡度变化,确定(例如通过计算)车队的预定车辆中的每一者在路网段的至少一部分上的至少一个物理特性。路网段的一部分被理解为划分为一个或多个区域的路网段。因而,物理特性可在短长度区域内确定,例如通过对其进行量化,这允许提高污染物或噪声排放和/或道路安全的空间精度。物理特性被理解为污染物、nox、pm2.5颗粒物或温室气体(例如,co2)的排放量,噪声排放水平和/或道路安全风险,例如所考虑的路网段的一部分上的每一预定车辆的道路附着力水平。例如,可以根据在步骤a)中确定的速度剖面来计算每一车辆的污染物排放、噪声排放或附着力水平;
70.c)将车队应用(或指派)到在前一阶段确定的物理参数,以获得在预定义车队上的物理特性分布,该车队定义每一预定车辆的数量(或百分比)。应用车队使得能够给出代表预定义车队中每一预定车辆的数量的每一物理特性的分布。因而,每一预定车辆与物理特性的值相关联,并且一分布(例如,代表预定义车队中每一预定车辆的数量的百分比)与每一物理特性的该值相关联。由此获得根据预定车辆的预定义车队的各种物理特性(取决于预定车辆的值中的每一者)的分布(也称为分配);
71.d)借助在步骤c)中获得的物理特性的分布来确定(或定义或计算)路网段的该部分中的物理参数。例如,通过计算预定分位数,优选地是预定义车队上的特征分布的平均值或第六十百分位数,来确定物理参数是可能的。
72.因此,可以确定nox、诸如co2等温室气体、pm2.5类型的颗粒物排放、噪声水平、车辆在路网段上的地面附着力。因此,通过对某些车辆的流通的禁止与否来了解车队改造的影响是可能的。评估道路基础设施改造(增加交通灯,最大限速更改,增加环岛、减速带等)对每一物理参数的影响也是可能的。这些客观特征避免了这些基础设施开发或道路法规修改的实际完成连同开发完成后对反馈进行评估的事后分析和测量。事实上,一方面,这些开发对社区(镇、县或地区)而言非常昂贵,且另一方面,评估这些改造所需的分析也很昂贵,因为它们需要在相当长的时间内设立测量装置并对记录的数据进行后处理。此外,由本发明的方法确定的物理参数是客观数据,而目前,由于缺乏提供定量分析的手段,数据通常是道路部分用户和/或当地居民提供的主观数据。因而,根据本发明的方法允许节省与基础设施或道路开发的物理完成和所提供的改造的分析相关的成本。此外,它还允许从客观数据确定诸如污染物排放、噪声排放和道路安全等准则。此外,借助多准则分析,它为基础设施改造或路网开发提供了选择辅助。基础设施被理解为任何物理元素,诸如交通灯、十字路口、环岛、加速/减速车道、车道的增加或移除等。开发被理解为任何法规或交通改造,例如最大限速更改、交通灯同步与否。
73.所获得的物理聚集参数与代表路网段上的污染物和/或噪声排放和/或道路安全的物理参数相对应。例如,它可被认为是路网段上的预定义车队的物理特性分布的平均值或第六十百分位数。
74.优选地,位置、速度和海拔测量可以在处于0.1和1000hz之间的范围中的采集频率下执行。因而,采集频率足以启用空间中的精确定位并避免对这一采集数据的过度管理。这一采集频率尤其可借助gps或诸如geco air
tm
(ifp energies nouvelles,法国)等应用程序来获得。
75.更优选地,采集频率的范围可以在0.5到10hz之间。这一配置在空间精度和快速计算之间提供了很好的折中。
76.优选地,可以例如通过校正诸被测位置以使其对应于路网段的诸位置来执行被测位置的空间聚集。事实上,通过fcd和/或gps执行的测量的不精确性可能导致所考虑的路网段上没有的位置数据。校正允许通过人为地将位置移动到路网段来减少这一不精确性。
77.根据本发明的优选实施例,路网段可被划分为预定长度的分段,并且预定长度可以由该方法的用户或者由最终用户(例如,市政、部门和/或地区的地方管理部门)来定义。这样划分成各分段允许改进物理参数(以及物理特性)的精度,尤其是它们的空间精度。因此,它提供了对物理参数(和物理特性)的局部增加或减少的更精细估计。预定长度越短,精度越高,尤其是在空间上。然后,可以在预定长度的每一分段上执行步骤b)、c)和d),这些分段中的每一者随后表示路网段的一部分。因而,在每一分段上确定物理特性并从而确定物理参数是可能的。因而,可更精确地评估这些参数的局部变化。精度因而被提高。
78.根据本发明的有利实现,在步骤d)中,可以通过聚集在步骤c)中获得的物理特性的分布来在路网段的至少一部分上确定物理参数。实际上,步骤c)允许获得在路网段的一部分上的预定车辆的预定义车队的物理特性的分布。聚集步骤允许从所分布的物理特性到可优选地为标量的物理参数,并且这一标量可以与代表路网段的该部分的客观值相对应。另选地,物理参数可以表示值的空间分布或集合,例如,该值集合可包括表示所确定分位数的第一标量和表示标准差的第二标量。因此,在污染物排放、噪声排放和/或道路安全方面,这一物理参数以客观、稳健和精确的方式表征了路网段的该部分。
79.优选地,可以通过将物理参数取作为与预定分位数相对应的物理特性分布的值来执行物理特性分布的聚集。换言之,通过聚集步骤c)的物理特性的分布,经聚集的物理参数是在步骤c)中获得的分布的值,分布值的所确定的分位数小于所述值:低于经聚集的物理参数的分布值的集合表示预定分位数。使用分位数允许细化聚集精度,并因而获得可靠、稳健和精确的结果。
80.优选地,预定分位数可以是第六十百分位数。因而,在步骤c)中获得的物理特性分布的值的60%低于经聚集的物理参数。对于不同道路类型和不同车辆类型,使用60%提供了精度和可靠性方面的良好折中。分位数是将数据集划分为包含相同数量的数据的各个区间的值。变量的分位数是在变量分布值低于所考虑的分位数时该变量所取的值。例如,q分位数是分数1/q的倍数的所有分位数。总共有(q
‑
1)个q分位数。因而,变量x的第p个q分位数被定义为值x
(p/q)
,使得低于x
(p/q)
的值表示x的分布的分数p/q。换言之,例如,低于第p分位数x
(p/q)
的变量x的值的分布等于p/q是:
[0081][0082]
p是变量x的分布函数。
[0083]
百分位数是1/100倍数的分位数。因而,第六十百分位数代表变量x的所有值,因此
它们代表x分布的60%。换言之,第六十百分位数的分布可写为如下:
[0084][0085]
有利地,污染物和/或噪声排放和/或道路安全的物理参数可包括排放的污染物量(例如nox和/或pm2.5型颗粒物)、温室气体排放量、噪声水平和/或代表对道路安全的影响的变量(也称为道路安全参数),优选地代表对道路安全的影响的变量是对路网段的所述部分的附着力。因而,污染物和/或噪声排放和/或道路安全的物理参数是得自该路网段的代表排放的污染、噪声和/或道路安全的客观数据,尤其是通过基础设施及其开发以及预定车辆的车队而得到的。
[0086]
根据本发明的配置,预定车辆的特性可包括车辆的质量、引擎类型和废气后处理类型。因而,这些特性允许精确地定义每一预定车辆类型的污染物和噪声排放以及道路附着力。每一预定车辆的物理特性的精度因而被提高。因此,与污染物和噪声排放和/或道路安全相关的物理参数是更精确的。
[0087]
根据本发明的有利方面,交通流可被应用于在步骤c)中确定的物理特性,交通流优选地包括根据所考虑的日期和当天的时间的路网段上的车流。交通流允许根据路网段(或该段的一部分)上的车流来评估当天污染物或噪声排放和/或道路安全的影响。
[0088]
交通流尤其可由每一时隙(例如每十分钟)路网段上的车流来确定。交通流因此可被测量,例如在当天期间,优选地在几天期间。相关于交通及其每日变化的数据因而在当天被记录并被收集。
[0089]
根据另一变型,交通流可以通过表示将来交通流的仿真来确定,例如来自将来公共交通网络发展或将来交通控制措施。
[0090]
在步骤c)结束处应用交通流提供对物理特性的每小时变化的更精确评估,例如在当天。为了应用交通流,物理特性分布的每一值乘以所考虑的每小时和/或每日时隙中的车流。在应用交通流后,执行在应用交通流后获得的分布的聚集的步骤d)。因而,所获得的经聚集物理参数随时间而变化,例如每10分钟时隙。这使得能够评估当天交通拥堵对污染物和噪音排放的影响或对道路安全方面的风险的影响。
[0091]
根据本发明的一方面,物理参数可被显示在道路图上,优选地借助智能手机、计算机、平板或计算机系统。由此获得用户可以查看的物理参数的地图。这一显示允许更好地标识集中了污染物或噪声排放以及与道路安全相关的风险的关键区域。这一地图还有用于评估基础设施或法规更改对路网段(或该段的一部分)的影响。这一地图还可使得能够同时或连续地查看污染物和噪声排放的影响和/或道路安全风险。因此,它帮助用户选择在这三个准则之间的最佳折中,以用于改造路网段的至少一部分的基础设施和/或法规。
[0092]
优选地,针对用户所选择的配置,物理参数可被显示在道路图上。该配置可包括要显示的物理参数、预定车辆的预定义车队、当路网段被划分为各分段时分段的预定长度、物理参数的灵敏度水平(灵敏度水平是所显示的精度,例如,pm2.5排放的增量为200mg/km)、预定分位数和/或交通流。这允许知道各种参数的影响,以在值方面和在空间位置方面提高所获得结果的精度。
[0093]
根据本发明的有利实现,可为物理参数确定置信度参数。这一置信度参数尤其取决于步骤a)中执行的位置、速度和海拔测量的数量,这些测量被用于确定路网段的速度剖
面和海拔变化。它也可取决于其他参数。它可以是定量的或定性的。
[0094]
这一置信度参数也可被显示在道路图上。
[0095]
它允许将结果的可靠性纳入考虑。
[0096]
根据本发明的优选实施例,在步骤b),对于每一预定车辆,可采集预定车辆的相关于每一预定车辆的设计的至少一个特性,并且为每一预定车辆构建以下模型:
[0097]
i)每一预定车辆的模型,借助预定车辆的至少一个特性(例如,车辆质量,且优选地是其惯性),将速度剖面且优选地坡度剖面与预定车辆的引擎的扭矩和速度进行相关,
[0098]
ii)预定车辆的引擎的模型,借助预定车辆的至少一个特性(举例而言,诸如引擎类型、柴油、汽油、电动、排量、性能等等之类的特性)将预定车辆的引擎的扭矩和速度与引擎出口处的污染物和/或噪声排放和/或道路安全风险进行相关,以及
[0099]
iii)后处理系统的模型,借助预定车辆的至少一个特性(例如,后处理系统的技术特性,例如后处理性能),将引擎出口处的污染物和/或噪声排放和/或道路安全风险与后处理系统出口处的污染物和/或噪声排放和/或道路安全风险分别进行相关,
[0100]
并且引擎扭矩和速度是借助车辆模型和速度剖面(且优选地是坡度剖面)来确定的;引擎出口处的污染物和/或噪声排放以及可任选的道路安全风险是借助引擎模型以及引擎扭矩和速度来确定的;并且车辆的污染物和/或噪声排放和/或道路安全风险是借助后处理系统模型以及引擎出口处的污染物和/或噪声排放和/或道路安全风险来确定的。
[0101]
车辆在后处理系统出口处的污染物和/或噪声排放和/或道路安全风险与根据本发明的方法的步骤b)结束处的物理特性相对应。
[0102]
因此,借助车辆、引擎和后处理系统的特性,精确地表征了每一预定车辆的污染物和/或噪声排放和/或道路安全风险。路网段上的物理参数的精度因而被提高。
[0103]
确定每一预定车辆的污染物和/或噪声排放
[0104]
车辆模型
[0105]
车辆模型可例如借助至少一个宏观参数(例如,车辆质量、最大功率和相关联的引擎速度、最大速度、传动类型,等等)将速度剖面和优选地坡度剖面与每一预定车辆的引擎的扭矩和速度进行相关。
[0106]
车辆模型可以将车辆动力学模型和车辆传动模型相组合。车辆动力学模型借助至少一个宏观参数(例如,车辆质量、传动类型、车轮尺寸)将速度剖面和优选地坡度剖面与所估计的车辆功率进行相关。车辆传动模型借助至少一个宏观参数(例如,传动类型、最大功率和相关联的引擎速度)将车辆功率与引擎速度和扭矩进行相关。
[0107]
车辆动力学模型考虑了车辆的动力学。可从应用于其纵轴的车辆动力学的基本原理的应用构建车辆动力学模型,并且它可被如下写为:
[0108][0109]
其中:
[0110]
m:车辆质量
[0111]
t:时间
[0112]
v:车速,来自速度剖面。
[0113]
f
res
是车辆所经受的摩擦力的合力,且它可被表达为如下形式的速度的函数:
[0114]
f
res
=a+bv+cv2[0115]
其中车辆的a、b、c参数要根据车辆的一般特性来标识(车辆的宏观参数)。
[0116]
f
t
:轮上的牵引力
[0117]
f
brk
:机械制动力
[0118]
f
slope
:可被表达为车辆质量和道路坡度剖面:
[0119]
f
slope
=mgsin(b)
[0120]
倾角b是车辆动力学模型的输入。实际上,倾角b可以根据海拔和行驶距离来计算,因此它取决于坡度剖面。
[0121]
这些方程使得能够写出将引擎的估计功率pe与车速和其他已知或可确定的宏观参数进行相关的公式。事实上,该方程可被写成如下:
[0122]
pe=f
t
*v/η
trans
[0123]
其中:
[0124]
η
trans
:传动效率
[0125]
v:车速。
[0126]
因而,通过组合各方程,借助已知和恒定的宏观参数,确定将引擎功率与速度剖面以及可能的坡度剖面进行相关的公式是可能的。
[0127]
传动模型估计热机转速与车速之间的减速比。它可根据车辆的一般特性(宏观参数),尤其是车辆质量、最大功率、传动类型(尤其是齿轮数),来被参数化。这一传动模型仅使用车速作为估算减速比的输入:
[0128]
r
mth
‑
v
=f(v)
[0129]
函数f尤其可以从制造商提供的图表中获得。r
mth
‑
v
是引擎转速与车速之间的减速比。这一减速比随后可被用于确定引擎速度ne。实际上,可写出以下关系:
[0130]
ne=r
mth
‑
v
*v
[0131]
然后,引擎扭矩cme随后可被确定为引擎功率(借助车辆动力学模型估计的)和速度的函数:
[0132]
cme=f2(ne,pe)
[0133]
函数f2可以从制造商提供的映射中获得。
[0134]
引擎模型
[0135]
引擎模型借助至少一个宏观参数将引擎速度和扭矩与引擎出口(即在后处理系统之前)处的污染物和/或噪声排放量进行相关。根据本发明的一实现,可以使用以下宏观参数中的至少一者来构建引擎模型:排量、引擎类型、扭矩和功率、空气回路架构、车辆认证标准,等等。
[0136]
根据本发明的一实施例,引擎模型可由能量模型和引擎出口处的污染物和/或噪声的模型的组合来构建。能量模型借助至少一个宏观参数(例如,排量、引擎类型、最大扭矩和功率、空气回路架构)将引擎扭矩和速度与内燃机中的流体流速和温度(燃料、进气、废气、可能的燃烧气体再循环)进行相关。引擎出口处的污染物和/或噪声水平的模型借助至少一个宏观参数(例如,车辆认证标准、引擎类型、空气回路架构)将内燃机中流体的流速和温度与引擎出口处的污染物和/或噪声排放进行相关。
[0137]
能量模型允许估计当前工作点的物理量(引擎速度、扭矩)。它根据宏观参数被参
数化。所估计的物理量是内燃机中流体的流速和温度(燃料、进气、废气、可能的燃烧气体再循环)。
[0138]
引擎出口处的污染物和/或噪声水平的模型允许根据引擎速度和扭矩数据以及来自能量模型的估计来估算引擎出口处的污染物和/或噪声排放。它可以根据车辆和引擎的一般特性来被参数化:车辆认证标准、引擎类型、空气回路架构,等等。
[0139]
例如,可以在两个步骤中实现来对引擎出口处的污染物的估计:
[0140]
借助准静态模型进行准静态排放估计,以及
[0141]
借助瞬态模型估计瞬态现象的影响。
[0142]
另选地,引擎出口处的污染物的估计也可借助准静态模型在单个步骤中完成。
[0143]
在给定时刻在工作点处对引擎的准静态排放估计等同于认为这一引擎在这一工作点处的稳定条件下运行。
[0144]
对瞬态现象(非稳定操作)的影响进行估计允许将通常产生附加污染物排放的瞬态现象纳入考虑。
[0145]
准静态污染物模型可借助车辆和引擎的宏观参数来被参数化。它们使得根据引擎速度和扭矩估计以及能量模型输出来在任何时刻估计引擎出口处的准静态污染物排放成为可能。准静态模型可以写成如下:
[0146]
psme
i
‑
qs
=f3(ne,cme)
[0147]
psme
i
‑
qs
:针对准静态引擎速度在引擎出口处污染物i的排放。
[0148]
函数f3可以是不同类型,取决于所研究污染物的类型。
[0149]
例如,准静态nox模型可以从gartner的工作中获得(u.gartner,g.hohenberg,h.daudel和h.oelschlegel,development and application of a semi
‑
empirical nox model to various hd diesel engines(半经验nox模型在各种hd柴油机上的开发和应用)),并且它可以写成如下:
[0150]
log(nox
qs
)=a0+a1*coc+a2*m
cyl
+a3*m
o2
[0151]
系数a0、a1、a2、a3是根据实验数据获得的。nox
qs
是每单位燃料质量的nox质量;m
cyl
是每循环中限制在气缸内的空气质量;m
o2
是每循环中限制在气缸内的氧气质量。
[0152]
这一模型的一个优点是这些系数逐引擎之间变化很小。这一点在gartner的上述文章中得到证明。
[0153]
引擎出口处的颗粒是两种现象的组合:燃烧室内的颗粒形成和后氧化。这些现象主要受空气/燃料比、引擎速度、燃料量和已燃气体比率的影响。
[0154]
也可针对其他污染物构建类似模型。
[0155]
下面描述的手段可被用来确定瞬态现象的影响。空气环路动力学现象生成bgr比(与废气再循环相关的已燃烧气体占比)与相关于稳定工作点的空气/燃料比的差异,这对污染物(尤其是碳氢化合物hc、一氧化碳co和颗粒物)具有强烈影响。瞬态影响模型是根据引擎宏观参数,尤其是回收空气回路特性(大气/增压、高压废气再循环egr
hp
/低压废气再循环egr
bp
),来参数化的。
[0156]
这些模型使得能够根据准静态估计和所估计的扭矩变化来估计已燃烧气体占比动态变化bgr
dyn
和空气/燃料比动态变化af
ratio
‑
dyn
:
[0157]
bgr
dyn
=f(bgr,cme,dcme/dt)
[0158]
af
ratio
‑
dyn
=f(af
ratio
,cme,dcme/dt)
[0159]
每一污染物的校正系数cor
i
‑
qs2tr
可根据这些动态量来计算:
[0160]
cor
i
‑
qs2tr
=f(bgr
dyn
,bgr,af
ratio
‑
dyn
,af
ratio
)
[0161]
这些校正系数允许通过将瞬态现象纳入考虑来估计引擎出口处的污染物排放。因此,引擎出口处的污染物排放可以写为以下类型的公式:
[0162]
psme
i
=cor
i
‑
qs2tr
*psme
i
‑
qs
[0163]
psme
i
表示引擎出口处污染物i的排放。
[0164]
后处理模型
[0165]
后处理模型借助至少一个宏观参数将引擎出口(即后处理系统之前)处的污染物和/或噪声排放与后处理系统出口处的污染物和/或噪声排放进行相关。根据本发明的一实现,可以使用以下宏观参数中的至少一者来构建引擎模型:排量、车辆认证标准,等等。
[0166]
后处理模型可包括每一去污染技术的子模型和/或降噪子模型,这些子模型根据车辆去污染或降噪系统的架构而关联。这些子模型可根据宏观车辆参数(诸如认证标准、排量,等等)来被参数化。例如,对于去污染,各种去污染技术可以是:
[0167]
‑
twc:三元催化转化器,
[0168]
‑
gpf(用于汽油引擎):汽油颗粒过滤器,
[0169]
‑
doc(用于柴油引擎):柴油氧化催化剂,
[0170]
‑
dpf(用于柴油引擎):柴油颗粒过滤器,
[0171]
‑
lnt(用于柴油引擎):稀燃nox捕集,
[0172]
‑
scr(用于柴油引擎):选择性催化还原。
[0173]
后处理模型允许根据对引擎出口处的温度、流速和污染物排放的估计来估计后处理系统出口处的污染物或噪声排放。可以通过将后处理系统离散成若干个槽(或层)并通过每一离散槽的效率conv
i,j
的关联来构建后处理模型。根据一示例,污染物排放的后处理模型可以写成如下:
[0174][0175]
psee
i
表示污染物i在后处理系统出口处的排放;conv
i,j
是后处理系统的槽j对污染物i的转换效率;t
é
ch是废气温度;q
é
ch是废气流速。
[0176]
后处理系统槽的效率可根据制造商提供的映射来确定。
[0177]
确定每一预定车辆在道路安全方面的风险
[0178]
道路安全风险往往定义路网段的危险状况。
[0179]
这些道路安全风险可以尤其根据车辆的道路附着力来确定。
[0180]
尤其可根据路段诸部分的坡度剖面和/或速度剖面、路段部分上的预定车辆和速度、加速度和减速度来表征道路附着力。附着力也可取决于道路的曲线。
[0181]
为了确定路网段的一部分的危险状况,在步骤b)结束处的道路安全参数可以通过执行以下步骤来确定:为预定义车队所考虑的每一预定车辆构建移动模型;确定每一预定车辆的滑移参数;确定每一预定车辆的道路安全参数(对应于在步骤b结束处的物理特性)。
[0182]
车辆移动模型的构建
[0183]
预定车辆的移动模型被理解为将至少一个(车辆轮胎)滑移参数与车辆的坡度剖
面的位置和/或海拔进行相关的模型。
[0184]
坡度剖面(在步骤a)中获得)被理解为作为路网段的位置(例如,纬度和经度)的函数的、表示路网段的海拔的变化或空间导数的曲线。
[0185]
该模型将车辆移动动力学(速度、加速度,等等)纳入考虑来确定车辆滑移,即车辆的不想要和不受控的移动。
[0186]
预定车辆的移动模型可以将以下条件中的至少一者、优选地全部纳入考虑:道路状况、天气状况、预定车辆的胎压和磨损,尤其是使用映射。这一映射尤其可以将滑移参数与轮胎附着系数进行相关。因而,道路安全参数更能代表所考虑路网段的该部分上预定车辆的危险状况。
[0187]
车辆的轮胎滑移参数可以是预定车辆的侧滑角,由β表示。该侧滑角对应于在车辆的速度矢量与车辆的径向轴之间形成的角度。
[0188]
车辆的另一轮胎滑移参数可以是纵向滑移率,由sr表示。纵向滑移率对应于轮胎相对于地面的打滑行为。这一滑移率尤其取决于轮胎的地面附着系数。
[0189]
根据一实施例,假定车轮保持与平地接触。此外,假定悬挂是刚性的,这允许忽略横摇和纵摇。
[0190]
例如,侧滑角β可通过如下类型的公式在任何时刻被确定:
[0191][0192]
其中:
[0193]
i:计算时刻,
[0194]
v
fy
:前轮速在轴y上的投影,
[0195]
v
ry
:后轮速在轴y上的投影,以及
[0196]
v
l
:车速在车辆的纵向轴上的投影,速度投影是所述车辆位置的函数。
[0197]
以下步骤序列可被执行以确定侧滑角β:
[0198]
前轮转向角α的计算
[0199]
这一小节详细描述了前轮转向角α的计算。
[0200]
根据坐标(位置)计算偏航角ψ可在任何时刻i从以下方程获得:
[0201][0202]
其中(x
gps
,y
gps
):来自速度剖面和/或坡度剖面的路网段的诸位置。
[0203]
车辆的角速度ω可在任何时刻i由以下类型的公式给出:
[0204][0205]
其中t
e
是采样频率。
[0206]
预定车辆的速度v在坐标系(x,y)中的投影v
x
和v
y
可如下给出:
[0207]
[0208][0209]
速度v在车辆坐标系中的投影v
l
和v
t
可如下给出:
[0210]
v
l
(i)=v
x
(i)*cosψ(i)+v
y
(i)*sinψ(i)
[0211]
v
t
(i)=
‑
v
x
(i)*sinψ(i)+v
y
(i)*cosψ(i)
[0212]
转向角随后可被计算为:
[0213][0214]
l
r
是重心与后轮轴之间的距离,以及
[0215]
l
f
是重心与前轮轴之间的距离。
[0216]
侧滑角β的计算
[0217]
在这一小节中详细描述了侧滑角β的计算。所选择的方法包括取每一预定车辆的前后车轮的侧滑角的平均值。
[0218]
因此,前后轮速v
f
和v
r
在y轴上的投影v
fy
和v
ry
分别被计算为:
[0219]
v
fy
(i)=(v
t
(i)+l
f
*ω(i))*cosα(i)
‑
v
l
(i)*sinα(i)
[0220]
v
ry
(i)=v
t
(i)
‑
l
r
*ω(i)
[0221]
β是通过以下形式的方程来从中导出的:
[0222][0223]
因此,通过组合这些方程,对于每一预定车辆,获得了将侧滑角β与预定车辆在路网段上的位置进行相关的移动模型。
[0224]
滑移参数还可包括通过车辆移动模型和借助作为车辆附着系数μ和天气状况(道路状况)的函数的映射来确定的纵向滑移率sr。
[0225]
为了表征粘附系数μ,可以执行以下步骤:
[0226]
坡度角θ的计算
[0227]
在这一小节中详细描述了坡度角θ的计算。
[0228]
任何时刻i行驶的距离δd由下式给出:
[0229][0230]
在任何时刻i的海拔变化δh可经由根据测量获得的海拔来简单计算得到:
[0231]
δh(i)=alt
gps
(i)
‑
alt
gps
(i
‑
1)
[0232]
alt
gps
是坡度剖面的每一位置处的海拔。
[0233]
因此,由slope表示的瞬时坡度可被获得:
[0234][0235]
坡度角θ可在任何时刻i通过以下形式的方程来确定:
[0236]
θ(i)=tan
‑1(slope)
[0237]
附着系数μ的计算
[0238]
附着系数μ是通过计算轮地接触处的牵引力f
driving
和标准重力f
z
来计算的:
[0239]
f
z
(i)=m
vehicle
*g*cos(θ(i))
[0240]
m
vehicle
是车辆的质量且g是重力加速度。
[0241]
f
driving
(i)=m
vehicle
*a
veh
(i)+m
vehicle
*g*sin(θ(i))+f
res
(v(i))
[0242]
其中a
veh
是车辆的瞬时加速度,且f
res
是施加在车辆上的摩擦力的合力,这一合力由以下称为“道路定律”的关系式给出。这一术语直接表达为车辆速度和特性的函数。
[0243][0244]
其中:
[0245]
ρ
air
:空气密度
[0246]
s:车辆前表面
[0247]
c
x
:车辆的正面空气阻力系数
[0248]
k:粘性摩擦系数
[0249]
crr:车辆的滚动阻力系数。
[0250]
车辆的瞬时加速度a
veh
可根据速度剖面的车速来获得。例如,它可以通过以下形式的方程来被估算:
[0251][0252]
附着系数μ可通过以下类型的方程来导出:
[0253][0254]
因此,通过组合诸方程,获得将附着系数与车辆位置和坡度剖面的海拔进行相关的车辆移动模型,随后借助映射从中推导出纵向滑移率sr。
[0255]
根据本发明的方法不限于下面描述的移动模型,可以使用其他模型,尤其是将车辆宽度纳入考虑的模型。
[0256]
滑移参数的确定
[0257]
至少一个车辆滑移参数可以借助以上构建的移动模型和根据本发明的方法的步骤a)的速度和坡度剖面来确定,并且滑移参数可包括侧滑角β和/或纵向滑移率sr。
[0258]
根据由此确定的侧滑角β,轮胎滑移是借助取决于两个参数的映射来表征的:附着系数μ和所确定的侧滑角β。这一映射可取决于道路状况,尤其是它取决于道路是干的还是湿的(可以根据天气预报来估计)以及轮胎的状况、轮胎的压力和磨损而非常不同。
[0259]
确定危险驾驶条件的指标
[0260]
根据前一步骤中确定的滑移参数来确定至少一个道路安全参数。道路安全参数可以采取值、等级,等等形式。
[0261]
可通过执行以下步骤来确定道路安全参数:
[0262]
‑
为滑移参数或其派生物选择至少一个危险条件阈值(每参数至少一个阈值),
[0263]
‑
确定滑移参数或其派生物是否超过所选阈值,
[0264]
‑
量化滑移参数或其派生物超过所选阈值的次数和/或频率(以时间或千米为单位),以及
[0265]
‑
从这一次数和/或频率中推导出道路安全参数。
[0266]
实际上,将滑移参数(或其派生物)与阈值进行比较允许确定驾驶员是否经常遇到增加道路安全风险的极限附着条件。
[0267]
道路安全参数可以是超过阈值的次数或频率。或者,指标可以是代表为每一滑移参数计算得到的各个次数和/或频率的平均值或等级(例如,10个等级之一)。
[0268]
可使用确定道路安全风险的其他方法。这些方法尤其可以将已经定义的引擎型号、到系统的各轮的传动和/或使用后处理设备(例如,abs类型)进行可选校正的制动系统纳入考虑。因而,例如,添加车辆模型、传动系统模型、制动系统模型和可选的后处理模型是可能的。
[0269]
本发明还涉及可从通信网络下载和/或记录在计算机可读介质上和/或处理器或服务器可执行的计算机程序产品,包括当所述程序在计算机、移动电话或计算机设备上执行时,用于实现根据以上特征中的任一者所述的方法的程序代码指令。因此,该方法的实现是简单且快速的。
[0270]
本发明还涉及根据上述特征之一的方法用于改造道路基础设施、扩展公共交通运输网和/或修改道路交通运输控制措施的用途。实际上,该方法尤其适合于比较各种技术选项,并且因而找出在污染物和噪声排放和/或道路安全风险方面的最佳折中。此外,该方法避免了与工作完成以及在工作完成后进行后验分析以评估改造的影响相关的成本。它允许预测这些更改的影响。
[0271]
因此,该方法的实现可以尤其包括以下步骤:
[0272]
‑
对现有路网段执行上述方法的诸步骤,以确定代表污染物和/或噪声排放和/或道路安全风险的物理参数,
[0273]
‑
在进行至少一项基础设施或开发改造(在给定位置增加交通灯、增加环岛、限制或增加路网段的车道数以便例如增加公共汽车或电车车道、路网段的最大限速修改)的情况下执行上述方法的诸步骤,以针对每一配置(即,每一基础设施或开发改造以及现有初始路网段)确定代表污染物和/或噪声排放和/或道路安全风险的物理参数,
[0274]
‑
确定最佳配置(例如,使得能够尽可能减少污染物排放或在最大程度上降低噪声的配置),
[0275]
‑
在路网段上进行工作以用于最佳配置的物理安装(例如,开发环岛、增加或移除交通灯、增加或移除行车道、添加限速标志)。
[0276]
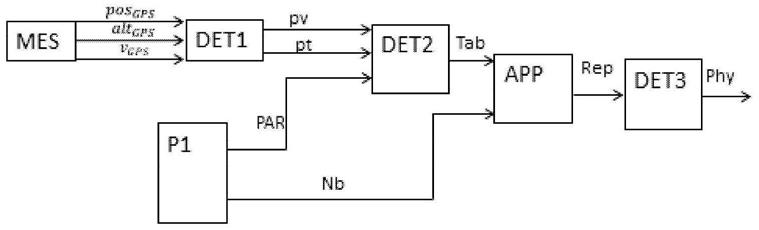
图1藉由非限制性示例示意性地解说了根据本发明的方法的实施例。
[0277]
在这一方法中,尤其是相继地执行以下步骤:
[0278]
a)使用测量装置(诸如举例而言,沿路网段行驶的车辆车载的gps设备)来测量mes位置pos
gps
、速度v
gps
和海拔alt
gps
。这些测量也可被记录在fcd系统中。根据这些测量在该路网段上确定det1速度剖面pv和坡度剖面pt。位置pos
gps
、速度v
gps
和海拔alt
gps
是针对沿该路网段行驶的车辆的若干次行驶而测得的,优选地是至少100次行驶,以便具有足够数据来以精确且可靠的方式确定速度剖面pv和坡度剖面pt。事实上,在较少的行驶下,该方法仍然可以实现,但置信度参数将是较低质量。事实上,对于少量行驶,例如在2到10次之间,所确定的速度剖面的可靠性可能较低,这由较低置信度参数来表征。另一方面,根据所记录的100次行驶,速度剖面是可靠的并且置信度参数被改善。用于测量位置pos
gps
、速度v
gps
和海拔alt
gps
的车辆优选地是不同类型的,并且它们不一定是预定义车队的预定车辆。换言之,用
于这些测量的车辆可以是任何机动车,并且优选地从不同车辆类型(因为惯性和速度例如可能影响加速度/减速度)执行这些测量,以便具有代表性的速度剖面pv和坡度剖面pt。由此获得的速度剖面足以精确地确定污染物和噪声排放以及道路安全风险,
[0279]
b)针对预定义车队p1的每一车辆,这些车辆中的每一者不一定与用于步骤a)的测量的车辆相关,确定det2代表所述路网段的至少一部分上的污染物排放(例如,nox排放量、co2排放量、pm2.5颗粒物量)、噪声排放(噪声水平)和/或道路安全风险(例如,车辆的道路附着力)的至少一个物理特性。每一物理特性是根据来自预定义车队p1的被纳入考虑的车辆的特性par和在步骤a)中确定的速度剖面pv和坡度剖面pt来确定的。因此,这些计算中纳入考虑的速度剖面pv和坡度剖面pt始终相同,无论在后续步骤中考虑的车辆如何。虽然所考虑的速度剖面pv是针对后续步骤(步骤b)到d))确定的,但感兴趣的是通过修改步骤a)中的速度剖面确定来修改速度剖面pv。例如,为了确定速度剖面pv,可以考虑单个时隙,一星期中的某一天,例如星期二上午7点到上午9点之间。因而,可以对污染物和噪声排放和/或其对道路安全的影响进行精细确定,并且精度因此被提高。因而,物理特性的不同值取决于车辆的特性par。在步骤b)的结束处,获得物理特性表tab,表tab的每一物理特性对应于预定义车队p1的车辆,
[0280]
c)将预定义车队p1应用app于在先前步骤中确定的物理特性的表tab以获得预定义车队p1上的物理特性的分布rep。因此,表tab的每一物理特性都乘以预定义车队p1中与此值相对应的车辆数量nb(或百分比)。由此获得根据预定义车队p1的车辆和预定义车队p1中这些车辆中的每一者的数量nb(或百分比)的物理特性的分布rep,
[0281]
d)借助在步骤c)中获得的物理特性分布rep确定det3所述路网段的至少一部分的物理参数phy。因此,在步骤c)中获得的物理特性分布rep被聚集。例如,对于这一聚集,物理参数可以被取为与分布rep的第六十百分位数相对应的分布rep的值。对于所观察的每一准则(污染物、噪声排放和/或道路安全风险),这一聚集操作允许从分布rep中的多个物理特性切换到物理参数phy的单个标量。换言之,在步骤d)结束处,路网段的每一部分由若干物理参数来表征,每一物理参数都是标量值,并且物理参数可以是例如nox排放量、co2排放量、pm2.5颗粒物量、噪声排放水平、道路附着力。
[0282]
因而,该方法允许针对预定车队p1确定路网段的物理参数。
[0283]
图2通过非限制性示例示意性地示出了根据这些物理特性(例如,以db为单位的噪声排放水平)中的每一者的分布dist的物理特性分布rep_phy。分布dist与车队中所考虑的每一类型的车辆(每一预定车辆)的数量直接相关。因而,计算得到的物理特性可以对应于10、20、30、40、50、60、70、80和90。值10和50对应于代表车队各20%的车辆,且值30、40、60、70、80和90中的每一者对应于代表车队各10%的车辆。值20未被代表。因而,第六十百分位数将对应于物理特性分布rep_phy的值50。实际上,小于或等于50的值分别为10、20、30、40和50,分别由车队车辆的20%、0%、10%、10%和20%来代表。因而,小于或等于50的值确实代表所考虑的车队的60%。因此,在步骤d)中通过在第六十百分位数处进行聚集来聚集的物理参数是50。例如,随后可以认为路网段的噪声水平因此对于所考虑的车队是50db。
[0284]
图3解说了空间聚集。在这一附图中,道路10由两条黑色实线表示。这一道路是双车道道路,两条车道由虚线分隔开。每一车道允许一个方向上的交通。换言之,车道之一允许从a行驶到b,而另一条车道允许从b行驶到a。车道20允许从a行驶到b。从a行驶到b的车辆
的位置以1hz的采集频率被测量。测量点与黑点相对应。观察到,这些点中的一些pout位于界定车道20的上部黑色实线和虚线之间所包含的空间之外。这些点pout随后被聚集,即被校正以人为地移回由上部黑色实线和虚线界定的车道20的空间中。因而,聚集步骤包括校正测量点以将其带回所考虑的空间中。虚线
‑
点箭头表示对这些点pout中的每一者执行的校正,并且灰色矩形表示经校正的测量点。
[0285]
图7藉由非限制性示例示意性地解说了根据本发明的方法的步骤b)的实施例。在这一附图中,虚线指示该方法的可选元素。
[0286]
在这一步骤b)之前,构建各种模型(车辆模型mod veh、引擎模型mod mot和后处理模型mod pot)。这些模型是根据宏观参数par来构建的。可任选地,宏观参数par可以从列出服务中的各种车辆的数据库bdd来获得。例如,宏观参数par可借助预定义车队的预定车辆的登记号、将号牌与车辆的设计(品牌、型号、引擎类型,等等)进行关联且包括预定车辆的宏观参数的数据库bdd来获得。
[0287]
第一系列的宏观参数par1被用于构建车辆模型mod veh。该第一系列的宏观参数par1可包括以下参数:车辆质量、最大功率及相关联的引擎速度、最大速度、传动类型(非限制性列表)。这些参数中的每一者取决于每一预定车辆。
[0288]
第二系列的宏观参数par2被用于构建引擎模型mod mot。该第二系列的宏观参数par2可包括以下参数:排量、引擎类型、最大扭矩和功率、空气循环架构、车辆认证标准(非限制性列表)。这些参数中的每一者取决于每一预定车辆。
[0289]
第三系列的宏观参数par3被用于构建后处理模型mod pot。该第三系列的宏观参数par3可包括以下参数:排量、车辆认证标准(非限制性列表)。这些参数中的每一者取决于每一预定车辆。
[0290]
根据该方法的步骤a)中确定的速度剖面pv和斜率剖面pt,引擎扭矩和速度是根据车辆模型mod veh来确定的,该模型根据速度剖面且优选地根据坡度剖面确定引擎的扭矩cme和速度ne。每一预定车辆都具有特定车辆模型mod veh。
[0291]
随后,可根据引擎的扭矩cme和转速ne,借助确定引擎出口处的污染物和/或噪声排放psme的引擎模型mod mot来确定引擎出口处的污染物和/或噪声排放。。所考虑的引擎取决于每一预定车辆。
[0292]
随后,借助后处理模型mod pot确定车辆的污染物和/或噪声排放,即在后处理系统出口处,是可能的,其根据引擎出口处的污染物和/或噪声排放psme来确定后处理系统出口处的污染物和/或噪声排放psee。污染物和/或噪声排放可在任何时刻以例如1hz的频率来确定。所考虑的后处理系统取决于每一预定车辆。
[0293]
可任选地,这一数据随后可被全部或部分地存储。一旦表征了预定车辆的污染和/或噪声排放psee,它们就可被存储sto(记录),具体而言是存储在数据库(不同于包括宏观参数的数据库)中。这一存储sto可只涉及预定车辆的污染物和/或噪声排放psee,但也可涉及中间数据:引擎的扭矩cme和速度ne和/或引擎出口处的污染物和/或噪声排放psme。这一信息使得能够以良好的空间和时间分辨率来监控实际使用和相关联的排放。这一信息可例如允许评估街道级道路基础设施的环境相关性,标识局部排放峰值,标识驾驶风格对排放的影响,等等。
[0294]
示例
[0295]
图4至6比较了里昂市区同一路网段的污染物排放(nox排放量)的确定的示例,该路网段延伸约150米。
[0296]
图4和图5示出了在所考虑的路网段上增加交通灯前后的差异。它们在由x轴上的以度为单位的经度lo和y轴上的以度为单位的纬度la来定义的道路地图上示出了污染物排放em的图。污染物排放以0和1000mg/km道路之间的的灰度级来标识出。
[0297]
图4示出了在添加交通灯之前使用根据本发明的图1的方法来确定的nox排放。路网段包括在添加第二交通灯之前的第一交通灯f1。
[0298]
图5示出了在添加交通灯f2后使用根据本发明的图1的方法来确定的nox排放,交通灯f2位于交通灯f1上游约100米处。图5因而包括两个交通灯,在改造之前已经初始存在的f1(与图4中的相同)和(已添加的)f2。借助用geco air
tm
应用(1hz fcd)收集的位置、速度和海拔测量,确定了用于确定图4和图5中所示出的地图的污染物排放的速度和坡度剖面。在本发明的这些示例的上下文中,交通灯位于villeurbanne中的roger salengro大街与longchamp街交叉口处的十字路口处。交通灯f2被定位在图5中。这一交通灯的目的是减慢交通速度并使该地区对行人和居民而言更安静和更安全。
[0299]
然而,如可在图5中看到的,通过与图4相比,在增加的交通灯f2上游(在示出交通流方向的黑色箭头的方向上),交通灯f2的存在使nox排放率增加约25%。这主要是由于在红灯f2处停车的阶段,并且因此是由于交通灯f2所施加的加速和减速阶段。
[0300]
图6示出了根据现有技术的copert方法在与图4和5中相同的路网段上确定污染物排放的示例。这一方法基于该路网的较长部分(至少1km)上的平均速度。因而,交通灯f1和/或f2的存在与否对该方法没有影响。这意味着图6也对应于带有单个交通灯(图4中的交通灯f1)的copert方法的应用,以及带有两个交通灯的copert方法的应用(图5中的红绿灯f1和f2),且甚至对应于没有交通灯的变型。根据copert方法,因而在这些不同的情况之间没有差异,并且该方法没有使得能够将路网段离散化,例如交通灯f1和f2。因此,这一方法不允许精确观察污染物排放的局部影响,也不允许在空间上精确地确定污染物排放。另一方面,图4和5使得能够对污染物排放进行局部离散化,这提供了对污染最严重区域的位置的精细确定,以及对新基础设施或新法规在污染方面对该路网的一部分的影响的精细确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1