一种高兼容性的非接触式同步电机转子励磁的建模方法
1.本发明涉及一种非接触式同步电机转子励磁的建模方法,属于车用电机控制应用技术领域。
背景技术:
2.在国家政策的支持下,我国的新能源汽车正在蓬勃发展。作为新能源汽车的核心部件,车载电机的性能是否符合要求,显得尤为重要。电励磁同步电机作为一款常用的交流电机,其具有功率因数可调、损耗小、效率高、结构简单、可靠性高等突出优点,具有作为车载驱动电机的巨大潜力。但传统的电励磁同步电机,有着用于换向的电刷与滑环结构,而电刷和换向器摩擦会引起火花,给新能源汽车带来安全隐患。此外,有刷电机还存在着效率相对较低、噪音大、易发热,寿命短、维护难等缺点。因此,电励磁同步电机的无刷化已成为必然发展趋势。
3.针对这一问题,传统方法有通过附加励磁机或附加绕组来实现无刷化;采用永磁材料来实现无刷化;利用无刷电励磁与永磁体的混合励磁方式实现无刷化。总的来说,传统的无刷方案都需要增加附加绕组或附加装置,使电机结构复杂,体积增加,电机利用率降低。本发明利用感应型非接触能量传输技术,提出了一种非接触式同步电机转子励磁新方法。此外,对于非接触式同步电机转子励磁系统各功能模块之间兼容度差,可移植性低等问题,本发明提出了一种具有高兼容性的初值修正的递推最小二乘辨识建模方法。
4.国内相同技术领域公开的专利申请有:名称是“一种同步电机转子励磁方法及装置”,申请号:cn107104613 a,该专利申请采用谐振式无线电能传输方式将直流或交流电源的电能以非接触方式传输给转子励磁绕组,实现转子励磁或混合励磁。该发明采用的是谐振式无线电能传输式技术,该技术传输功率较低,不适合应用于需要大功率传输的车载驱动系统,且该发明未解决非接触式励磁系统各功能模块之间兼容度差,可移植性低等问题。
技术实现要素:
5.本发明的目的是针对电励磁同步电机的电刷与滑环结构给新能源汽车带来安全隐患的问题,利用感应型非接触能量传输技术,提出了一种非接触式同步电机转子励磁方法,从而实现无刷化。相比于其他无刷化技术,该方法无需增加附加绕组或附加装置,结构简单,电机利用率高。此外,对于非接触式同步电机转子励磁系统各功能模块之间兼容度差,可移植性低等问题,本发明提出了一种具有高兼容性的初值修正的递推最小二乘辨识建模方法,得到非接触式同步电机转子励磁系统的传递函数,即输入输出之间的传递关系。
6.本发明采用的技术方案是采用如下步骤:一种非接触式同步电机转子励磁的建模方法,包括以下步骤:构建感应型非接触式同步电机转子励磁系统10,形成感应型非接触式同步电机转子励磁系统的辨识模型;建立递推最小二乘法辨识模型,最后实现对初值为估计值的递推最小二乘法辨识建模。
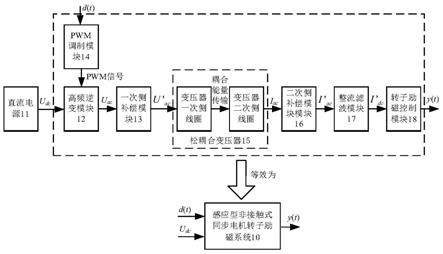
7.进一步,构建感应型非接触式同步电机转子励磁系统10的具体过程为:将高频逆
变模块12、一次侧补偿模块13、pwm调制模块14、松耦合变压器15、二次侧补偿模块16、整流滤波模块17和转子励磁控制模块18依次相连,作为一个整体组成感应型非接触式同步电机转子励磁系统10;该系统以直流电源11输出的直流电压u
dc
和pwm控制调制模块14的pwm控制信号d(t)为输入,以转子励磁电压y(t)为输出;其中,高频逆变模块12、一次侧补偿模块13、pwm调制模块14和松耦合变压器15的一次侧线圈安装在同步电机的定子上;松耦合变压器15的二次侧绕组、二次侧补偿模块16、整流滤波模块17和转子励磁控制模块18安装在同步电机转子上。
8.进一步,所述松耦合变压器15由变压器一次侧线圈和二次侧线圈组成,两者相互分离,并通过电磁感应耦合关系实现能量的传输;一次侧补偿模块13用于降低一次侧电源模块的伏安容量,提高系统的功率因数;二次侧补偿模块16用于提高系统向负载传输功率的能力,去除二次侧绕组漏感的影响。
9.进一步,高频逆变模块12将直流电源11输出的直流电u
dc
转换为指定频率的高频交流电u
ac
。
10.进一步,整流滤波模块17将高频交流电i’ac
转换成直流电i’dc
,再通过转子励磁控制模块18实现对转子绕组的励磁。
11.进一步,感应型非接触式同步电机转子励磁系统的辨识模型中,根据输入信号d(t)和输出信号y(t),得出系统的传递函数g(s);
12.将感应型非接触式同步电机转子励磁系统10看作为一个黑箱模型,增添测量模块21对同步电机转子励磁系统10的输入信号d(t)测量,得到包含了噪声r1的输入测量信号d’(t);同理,增添测量模块22对同步电机转子励磁系统10的输出信号y(t)测量,得到包含了噪声r2的输出测量信号y’(t),辨识模块23根据输入输出的测量数据,得到同步电机转子励磁系统10的传递函数g(s);其中,输入信号d(t)的占空比为常数d,用阶跃信号dε(t)表示,输出信号y(t)为阶跃响应信号。
13.进一步,建立递推最小二乘法辨识模型的具体过程为:
14.首先建立感应型非接触式同步电机转子励磁系统10的差分方程如下:
[0015][0016]
其中,k=1,2.3
…
,y(k)为系统离散化输出,u(k)为系统离散化输入,ξ(k)为系统白噪声,令其为均值等于零的高斯白噪声,a
i
、b
j
分别为差分系数;
[0017]
定义:
[0018]
数据矩阵
[0019]
待估参数矩阵θ
n
=[a1...a
n b1...b
n
]
t
[0020]
则可得到式(1)简化后的公式
[0021][0022]
取n组数据,将式(2)写成矩阵形式,如下:
[0023]
y
n
=φ
n
θ+e
n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0024]
式中:
[0025]
n阶输出矩阵y
n
=[y(n+1),y(n+2),...,y(n+n)]
t
[0026]
n阶数据矩阵
[0027]
n阶白噪声矩阵e
n
=[ξ(n+1)ξ(n+2).ξ(n+n)]
t
[0028]
其中,采样数据总数n必须充分大,才可以提高辨识的精度,降低噪声对系统的影响。
[0029]
u(k)和y(k)为可测量数据,根据最小二乘准则,通过使指标函数最小化,即可以得到待估参数θ的最小二乘估计,如式(4)所示:
[0030][0031]
定义n阶参数矩阵:
[0032]
p
n
=(φ
tn
φ
n
)
‑1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0033]
则式(4)可写成:
[0034][0035]
如再增加一组新观测值,则新参数估计值为:
[0036][0037]
其中e为单位矩阵;
[0038]
定义增益矩阵可得到递推最小二乘算法的参数估算公式:
[0039][0040]
该方法根据p
n
以及新的观测数据,直接计算出g
n+1
,从而再根据计算出不需要求(φ
tn
φ
n
)
‑1,能够更快、更精确的处理较大数据量,为提高模型精度,节省计算时间与计算量,提高建模实时性,本发明根据以上递推最小二乘法辨识模型提出了初值修正的递推最小二乘法辨识建模法。
[0041]
进一步,初值修正的递推最小二乘法辨识模型实现的具体过程为:
[0042]
首先根据所建立的递推最小二乘法辨识模型,利用matlab/simulink仿真平台对感应型非接触式同步电机转子励磁系统10进行仿真实验,得到励磁电压的仿真结果。利用matlab读取simulink仿真的输出励磁电压数据,其中,进行采样的仿真时间为5ms,采样周期t=50μs,对输入、输出信号进行采样得到离散的输入序列dε(kt)和输出序列y(kt),为使最小二乘法中数据矩阵满秩,将采样所得的输入序列dε(kt)和输出序列y(kt)按照式(9)变换为斜坡序列g(kt):
[0043][0044]
然后,利用赤池信息量(aic)准则获取系统10模型的阶次,基于赤池信息量准则的系统10模型阶次的判定公式如式(10)所示:
[0045]
aic(n)=nlnσ
2ε
+2n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0046]
其中,n为阶次,σ
2ε
为白噪声ξ(k)的方差的似然估计;
[0047]
将转换后的斜坡数据代入式(10),得到模型各阶次的aic值,根据aic准则选取aic值最小时的阶次n以及此时的待估参数最后,得到n=3,最后,得到n=3,
[0048]
为提高模型的准确度,本发明利用初值修正的方案对递推最小二乘法辨识建模法作出改进;先用最小二乘法对采集并变换后的前100组数据进行参数估计,将得到的待估参数作为递推最小二乘算法的初值,以此实现初值修正,再通过仿真计算得到此时的待估参数最后,得到模型的离散型传递函数和连续传递函数分别如式(11)和式(12)所示:
[0049][0050][0051]
至此,便得到了系统10的动态模型。
[0052]
1)将高频逆变模块、一次侧补偿模块、调制模块、松耦合变压器、二次侧补偿模块、整流滤波模块和转子励磁控制模块作为一个整体组成感应型非接触式同步电机转子励磁系统;2)将感应型非接触式同步电机转子励磁系统看作为一个黑箱模型,并形成感应型非接触式同步电机转子励磁系统的辨识模型;3)建立递推最小二乘法辨识模型;4)初值为估计值的递推最小二乘法辨识建模的实现。
[0053]
本发明的有益之处在于:
[0054]
1、利用非接触式变压器取代传统励磁系统中的电刷和滑环,实现不增加励磁装置及电机复杂程度的无刷励磁目标。
[0055]
2、利用谐振补偿模块减小一次侧线圈和二次侧线圈之间的气隙所带来的耦合系数小、存在较大漏电感的问题,降低一次侧电源模块的伏安容量,提高系统的功率因数,向负载传输功率的能力。
[0056]
3、将感应型非接触式同步电机转子励磁系统看作为一个黑箱模型,无需考虑系统内部的明确谐振补偿网络及变换器拓扑电路,兼容性强,实现对复杂系统的简单化处理。
[0057]
4、利用初值修正的递推最小二乘法辨识模型获取系统输入与输出之间的传递关系,所得结果与仿真结果吻合性好。
[0058]
本发明所提出的一种高兼容性的非接触式同步电机转子励磁的建模方法只需要可测、易测的输入和输出变量,不需要增加额外的励磁装置;此外,该方法所形成的辨识模型不需要知道系统内部的明确谐振补偿网络及变换器拓扑电路,兼容性强。
附图说明
[0059]
图1是本发明中所述感应型非接触式同步电机转子励磁系统。
[0060]
图2是本发明中所述感应型非接触式同步电机转子励磁系统的辨识模型。
[0061]
图3是本发明中所述感应型非接触式同步电机转子励磁系统励磁电压的仿真结果以及根据采样获得的阶跃响应输出序列。(a)电机转子励磁系统励磁电压的仿真结果;(b)
阶跃响应输出序列;
[0062]
图4是本发明中所述阶跃数据变换后的斜坡响应输出序列。
[0063]
图5是本发明中所建初值修正的递推最小二乘法辨识模型得到的数据与仿真输出励磁电压曲线的对比情况。
[0064]
图6是本发明中所述初值修正的递推最小二乘法辨识建模的实现流程图。
具体实施方式
[0065]
本发明具体的实施分以下4步:
[0066]
1、如图1所示,构建感应型非接触式同步电机转子励磁系统10。本发明将高频逆变模块12、一次侧补偿模块13、pwm调制模块14、松耦合变压器15、二次侧补偿模块16、整流滤波模块17和转子励磁控制模块18作为一个整体组成感应型非接触式同步电机转子励磁系统10。该系统以直流电源11输出的直流电压u
dc
和pwm控制调制模块14的pwm控制信号d(t)为输入,以转子励磁电压y(t)为输出。松耦合变压器15由变压器一次侧线圈和二次侧线圈组成,两者相互分离,并通过电磁感应耦合关系实现能量的传输。一次侧补偿模块13用于降低一次侧电源模块的伏安容量,提高系统的功率因数。同理,二次侧补偿模块16用于提高系统向负载传输功率的能力,去除二次侧绕组漏感的影响。高频逆变模块12将直流电源11输出的直流电u
dc
转换为指定频率的高频交流电u
ac
。整流滤波模块17将高频交流电i’ac
转换成直流电i’dc
,再通过转子励磁控制模块18实现对转子绕组的励磁。其中,高频逆变模块12、一次侧补偿模块13、pwm调制模块14和松耦合变压器15的一次侧线圈安装在同步电机的定子上;松耦合变压器15的二次侧绕组、二次侧补偿模块16、整流滤波模块17和转子励磁控制模块18安装在同步电机转子上。系统10的电能传输过程如下:
[0067]
pwm调制模块14根据系统输入的pwm控制信号d(t),在直流电源11供电下实现对高频逆变模块12的控制,输出相应的pwm信号控制逆变器的各路开关管,将直流电源11输出的直流电u
dc
变换为高频交流电u
ac
,经一次侧补偿模块13谐振补偿后输出u’ac
,,并施加到松耦合变压器15的一次侧线圈上。高频交流信号u’ac
在一次侧线圈上产生高频交变的磁场,并通过气隙将能量耦合到二次侧线圈上,从而产生交变的励磁电流i
ac
。励磁电流i
ac
经二次侧补偿模块16谐振补偿后输出i’ac
,再经过整流滤波模块17整流滤波后输出直流电i’dc
,最后经过转子励磁控制模块18将励磁电压y(t)施加到转子励磁绕组上。
[0068]
所述的一次侧补偿模块13的输入为高频交流电u
ac
,输出为补偿高频交流电u’ac
,一次侧补偿模块13的输入输出关系为:
[0069][0070]
式中,ω1为电源的角频率,l1为一次侧补偿绕组的自感,r1为一次侧补偿电路的电阻。
[0071]
所述的松耦合变压器15的输入为补偿高频交流电u’ac
,输出为交变的励磁电流i
ac
,松耦合变压器15的输入输出关系为:
[0072][0073]
式中,z
in
为变压器的输入阻抗,z
11
是一次侧线圈的回路阻抗,z
22
是二次侧线圈的回路阻抗,m是一次侧绕组与二次侧绕组间的互感。
[0074]
所述的二次侧补偿模块16的输入为励磁电流i
ac
,输出为补偿励磁电流i’ac,二次侧补偿模块16的输入输出关系为:
[0075][0076]
式中,ω2为电流的角频率,l2为二次侧补偿绕组的自感,r2为二次侧补偿电路的电阻。
[0077]
2、如图2所示,形成感应型非接触式同步电机转子励磁系统的辨识模型。其根据输入信号d(t)和输出信号y(t),得出系统的传递函数g(s)。具体过程如下:
[0078]
将感应型非接触式同步电机转子励磁系统10看作为一个黑箱模型,即不考虑系统内部的明确谐振补偿网络及变换器拓扑电路,实现对复杂系统的简单化处理。考虑到实际系统在输入端和输出端均会受到噪声影响,增添测量模块21对系统10的输入信号d(t)测量,得到包含了噪声r1的输入测量信号d’(t)。同理,增添测量模块22对系统10的输出信号y(t)测量,得到包含了噪声r2的输出测量信号y’(t)。辨识模块23根据输入输出的测量数据,得到系统10的传递函数g(s)。其中,输入信号d(t)的占空比为常数d,用阶跃信号dε(t)表示,输出信号y(t)为阶跃响应信号。辨识模块23的建立及其得到传递函数g(s)的过程将在下面详细说明。
[0079]
3、建立递推最小二乘法辨识模型。首先建立感应型非接触式同步电机转子励磁系统10的差分方程如下:
[0080][0081]
其中,k=1,2.3
…
,y(k)为系统离散化输出,u(k)为系统离散化输入,ξ(k)为系统白噪声,令其为均值等于零的高斯白噪声,a
i
、b
j
分别为差分系数;
[0082]
定义:
[0083]
数据矩阵
[0084]
待估参数矩阵θ
n
=[a1...a
n b1...b
n
]
t
[0085]
则可得到式(1)简化后的公式
[0086][0087]
取n组数据,将式(2)写成矩阵形式,如下:
[0088]
y
n
=φ
n
θ+e
n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0089]
式中:
[0090]
n阶输出矩阵y
n
=[y(n+1),y(n+2),...,y(n+n)]
t
,
[0091]
n阶数据矩阵
[0092]
n阶白噪声矩阵e
n
=[ξ(n+1)ξ(n+2).ξ(n+n)]
t
[0093]
其中,采样数据总数n必须充分大,才可以保证辨识的精度,降低噪声对系统的影响。
[0094]
u(k)和y(k)为可测量数据,根据最小二乘准则,通过使指标函数最小化,即可以得到待估参数θ的最小二乘估计如式(4)所示:
[0095][0096]
定义n阶参数矩阵:
[0097]
p
n
=(φ
tn
φ
n
)
‑1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0098]
则式(4)可写成:
[0099][0100]
如再增加一组新观测值,则新参数估计值为:
[0101][0102]
式中e为单位矩阵。
[0103]
定义增益矩阵可得到递推最小二乘算法的参数估算公式:
[0104][0105]
该方法根据p
n
以及新的观测数据,直接计算出g
n+1
,从而再根据计算出不需要求(φ
tn
φ
n
)
‑1,能够更快、更精确的处理较大数据量。为提高模型精度,节省计算时间与计算量,提高建模实时性,本发明根据以上递推最小二乘法辨识模型提出了初值修正的递推最小二乘法辨识建模法。具体实现过程在第4部分说明。
[0106]
4、初值修正的递推最小二乘法辨识建模的实现。首先根据所建立的递推最小二乘法辨识模型,利用matlab/simulink仿真平台对感应型非接触式同步电机转子励磁系统10进行仿真实验,得到励磁电压的仿真结果如图3(a)所示。利用matlab读取simulink仿真的输出励磁电压数据,其中,进行采样的仿真时间为5ms,采样周期t=50μs,对输入、输出信号进行采样得到的输入序列dε(kt),输出序列y(kt)如3(b)图所示。为使最小二乘法中数据矩阵满秩,将采样所得的输入序列dε(kt)和输出序列y(kt)按照式(9)变换为斜坡序列g(kt)。
[0107][0108]
变换后的响应数据如图4所示。
[0109]
然后,利用赤池信息量(aic)准则获取系统10模型的阶次。基于赤池信息量准则的系统10模型阶次的判定公式如式(10)所示:
[0110]
aic(n)=nlnσ
2ε
+2n
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0111]
其中,n为阶次,σ
2ε
为白噪声ξ(k)的方差的似然估计。
[0112]
将转换后的斜坡数据代入式(10),得到模型各阶次的aic值。根据aic准则选取aic值最小时的阶次n以及此时的待估参数最后,得到n=3,最后,得到n=3,
[0113]
为提高模型的准确度,本发明利用初值修正的方案对递推最小二乘法辨识建模法作出改进。先用最小二乘法对采集并变换后的前100组数据进行参数估计,将得到的待估参数作为递推最小二乘算法的初值,以此实现初值修正,再通过仿真计算此时的待估参数最后,得到模型的离散型传递函数和连续传递函数分别如式(11)和式(12)所示。
[0114][0115][0116]
至此,便得到了系统10的动态模型。根据所建初值修正的递推最小二乘法辨识模型,得到的数据与仿真输出励磁电压曲线的对比情况如图5所示。
[0117]
结合以上初值修正的递推最小二乘法辨识建模的实现过程,形成辨识建模流程图,如图6所示。图6便是图2中辨识模块23具体实现过程。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1