速度传感器感应电机转矩恒定转速调节系统
1.本发明属于电力电子与电力传动领域,尤其适用于对速度传感器感应电机转矩恒定转速调节系统,其结合感应电机的速度传感器对其转速进行取样反馈,通过反馈控制实现感应电机负载的高精度快速响应速度跟随特性的过程。
背景技术:
2.感应电机由于结构简单,制造成本低而应用广泛,但是在调速性能上却存在缺陷,如稳定性差,调速性能不佳等。通过设计其闭环控制方法,如速度传感器闭环矢量控制,可以实现感应电机的快速与高效的控制效果,提高感应电机的应用场景与范围。本发明专利通过设计其负载转矩恒定情况,改变负载的给定速度,结合闭环矢量控制方法实现负载给定速度的快速与高效跟随效果。
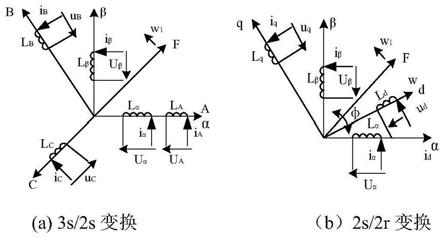
3.如图1所示为矢量坐标变换基础图示,图1(a)为通过将三相静止坐标变换到两相静止坐标图示,其作用为通过将感应电机三相定子电流转换为静止两相坐标变量,然后在通过图1(b)中的两相静止坐标变量变换到两相旋转坐标变量,以与感应电机转子三相电流进行变换对应,实现整个矢量控制变换的基本过程。
4.由图可得i
α
,i
β
与id,iq的关系为:
[0005][0006]
式中i
α
,i
β
为静止坐标下的两相定子电流值,id,iq为旋转坐标下的两相定子电流值。整理可得,两相静止坐标系到两相旋转坐标系的变换矩阵式为:
[0007][0008][0009]
式中c
2s/2r
为坐标变换矩阵。
[0010]
两相旋转坐标系到两相静止坐标系的变换矩阵为:
[0011][0012]
图2所示为基于速度传感器感应电机矢量控制恒转矩转速调节系统的结构图,图中感应电机角速度反馈量与给定速度量进行比较,用以在速度调节器asr中进行pi调节,通过给定速度与asr中的两变量进行变换,形成两变量中的dq轴信号。在此基础上,结合感应电机额定电流、额定角速度及实际角速度变量,形成矢量坐标系中的角度信号,实现矢量控制坐标系中的角度值的确定。最终,通过dq轴信号与确定的角度信号形成逆变器中的三相脉冲驱动信号,达到感应电机负载脉冲驱动的准确控制,实现高精度调速效果。通过设定其
负载转矩不变,转速变化条件,该系统可以实现转速快速与稳定的跟随特性。
技术实现要素:
[0013]
结合矢量控制基本原理及速度传感器矢量控制系统框图中的流程。可以得到坐标变换公式,三变量到两变量坐标变换如下:
[0014][0015]
其矩阵形式为:
[0016][0017][0018]
式中,i
α
、i
β
为α、β绕组电流,i0为便于逆变换而增加的一相零序分量;ia、ib、ic分别为a、b、c感应电机三相定子电流。
[0019]
其两相到三相的变换矩阵方程式为:
[0020][0021]
其变换矩阵为:
[0022][0023]
两相静止坐标系下的电机电压方程为:
[0024][0025]
式中u
sα
,u
sβ
为定子侧坐标电压,rs为定子电阻,ls为定子电抗,lm为互感,p及积分算子,rr为转子电阻,lr为转子电抗。
[0026]
结合矢量控制策略,对三相感应电机进行调速精确快速控制,提高三相感应电机的控制性能,使其适用于更广的驱动领域。
[0027]
线性pi调节器的传递函数为:
[0028][0029]
结合速度传感器矢量控制策略,通过负载转矩不变特性,改变其速度变量,实现感应电机的速度高效准确跟随特性。通过设定三个速度档,用以模拟实际的速度需求。
[0030]
通过确定其转矩转速与时间变量关系式:
[0031][0032]
其中,vi表示速度量,ti表示时间量,t表示转矩量。
附图说明
[0033]
图1矢量坐标变换原理
[0034]
图2速度传感器矢量控制恒转矩转速调节系统结构图
[0035]
图3 svpwm矢量控制感应电机恒转矩转速调节系统仿真图
[0036]
图4速度传感器矢量控制恒转矩转速调节系统pi调节模块结构
[0037]
图5恒定负载变转速情况感应电机转子电流波形
[0038]
图6恒定负载变转速情况感应电机转子磁链波形
[0039]
图7恒定负载变转速情况感应电机定子电流波形
[0040]
图8恒定负载变转速情况感应电机定子磁链波形
[0041]
图9恒定负载变转速情况感应电机转速波形
[0042]
图10恒定负载变转速情况感应电机转矩波形
具体实施方式
[0043]
实施例子:
[0044]
本发明采用速度传感器矢量控制恒转矩转速调节系统的实施参数如表1所示:
[0045]
表1速度传感器矢量控制恒转矩转速调节系统变量及参数值
[0046]
[0047][0048]
通过表1中所列实例数据参数,建立仿真模型并调试其运行环境,可以得到仿真结果。如图3所示为svpwm矢量控制感应电机恒转矩转速调节系统仿真图,图中包括逆变电源结构模块、三相感应电机、感应电机信号取样模块、感应电机调速反馈模块、矢量控制系统模块等部分。其中通过设定其转矩变量及给定速度跟随变量,用于适应恒转矩变速系统,该转速变化范围在1000-1800rpm。
[0049]
通过模型中的角速度反馈,结合pi速度调节器的控制,可以实现速度传感器矢量控制恒转矩转速调节系统较好的调节特性,通过适当控制其参数变化,用于对其响应速度及超调量进行平衡调节,如图4所示为仿真模块中的pi速度调节模块。
[0050]
如图5所示为恒定负载变转速情况感应电机转子电流波形,感应电机转子电流频率与负载有关。图中转子电流在转速变化过程中会有短暂的冲击,但是其会在短时间内完成稳态的过度过程,可以看出感应电机转子电流较为平稳。
[0051]
如图6所示为恒定负载变转速情况感应电机转子磁链波形,通过dq轴的感应电机转子磁链图形可以得到其状态变化过程,波形表明磁链过度状态较佳。
[0052]
图7所示为恒定负载变转速情况感应电机定子电流波形,感应电机定子电流与系统电源频率有关,因此其波形与转子电流存在频率的较大差异。图中定子电流在负载转速发生变化过程中存在冲击,但是在短时间内其能够实现快速的稳态过度。
[0053]
图8所示为恒定负载变转速情况感应电机定子磁链波形,通过波形亦可看出其dq轴磁链变化效果较好,过度状态比较平稳。
[0054]
图9所示为恒定负载变转速情况感应电机转速波形,图中负载不变情况其转速与给定转速实现闭环跟随,具有快速响应的效果,且从波形可以得到其超调量较小,因此电机运行状态较为平稳,振动小。
[0055]
图10所示为恒定负载变转速情况感应电机转矩波形,图中负载不变情况其转矩输出存在一定的增加,这是为速度改变过程中除了负载以外的其他转矩量而消耗的。图中在启动及转速发生变化过程中存在转矩波动,是用以为电机转速变化而提供的加速度及其他转矩消耗。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1