一种低压开关柜智能停送电系统的控制方法与流程
1.本发明主要涉及供配电自动化技术领域,特别是涉及一种低压开关柜智能停送电系统的控制方法。
背景技术:
2.低压开关柜是整个电力系统中的末端设备,通常设置在低压用电负荷相对集中的区域,并把电能分配给就近的负荷,同时能够对用电负荷提供保护、监视及控制。但在整个工厂供配电系统中,低压开关室根据负荷相对集中的原则布置,在地理位置上较为分散,执行停送电作业的电工来回路程多、用时长、工作效率低。
3.根据工厂用电管理制度,在对生产设备检修时除在现场采取二次保护之外必须从源头切断一次动力电源,因此需要对相关检修设备进行停送电操作,在停送电作业过程中涉及到多部门、多级人员的参与,包括停送电申请、管理审批、安全措施制定和落实、分合闸操作、验电、复电等多个环节,在实际的停送电管理中,存在效率低、审批时间长、停送电记录不完整、容易出现电工触电事故并且不易溯源等问题。因此需要一种低压开关柜智能停送电系统来满足生产、检修的远程停送电需求,通过机器人代替人力,完成大量停送电工作,又能保证作业人员安全。
技术实现要素:
4.针对上述技术的不足,本发明提供了一种低压开关柜智能停送电系统的控制方法,具备智能识别、自动停送电等优点,解决了一般低压开关柜远距离停送电、操作危险性高等问题。
5.为达到上述目的,本发明是通过以下技术方案实现的:
6.一种低压开关柜智能停送电系统的控制方法,所述停送电系统包括多个低压开关柜、plc控制系统、信号收发器、以及柔性协作机器人,所述低压开关柜上设置终端识别系统,所述柔性协作机器人包括主控单元和机器人手臂,机器人手臂的末端设有末端执行器、视觉识别系统、激光测距仪、以及力矩传感器,包括如下步骤:
7.(1)plc控制系统通过信号收发器向柔性协作机器人发出的对某个低压开关柜的某个抽屉单元的操作指令;
8.(2)柔性协作机器人接收plc控制系统的指令,通过视觉识别系统辨别终端识别系统,指令柔性协作机器人到达指定低压开关柜及低压开关柜内的抽屉单元;
9.(3)所述柔性协作机器人通过末端执行器执行停送电操作指令;
10.(4)当执行停电操作时,末端执行器操作断路器操作手柄执行分闸指令,断路器操作手柄指向分闸位置,然后将位置选择开关旋转至移出位置,最后拖拽抽屉把手抽出抽屉单元,完成停电操作程序;当执行送电操作时,末端执行器操作抽屉把手,将抽屉单元推入低压开关柜腔体中,然后将位置开关旋至工作位置,最后操作断路器操作手柄执行合闸指令,断路器操作手柄指向合闸位置,完成送电操作程序。
11.进一步的,所述柔性协作机器人设置在轮式移动agv小车上,轮式移动agv小车通过信号收发器与柔性协作机器人的主控单元信号连接,接收主控单元发出的指令信号。
12.进一步的,所述终端识别系统包括所述低压开关柜的顶部设有低压开关柜编号识别标牌以及抽屉单元上的识别二维码,所述低压开关柜编号识别标牌和识别二维码均与柔性协作机器人的视觉识别系统信号连接,用于柔性协作机器人识别定位需要执行停送电操作的低压开关柜以及需执行停电操作的抽屉单元。
13.进一步的,所述柔性协作机器人的末端执行器、视觉识别系统、激光测距仪、力矩传感器均由主控单元控制,所述主控单元通过信号收发器与plc控制系统信号连接。
14.与现有技术相比,本发明的有益效果:
15.本发明提供的一种低压开关柜智能停送电系统的控制方法,通过plc控制系统、柔性协作机器人系统、轮式移动agv小车和终端识别系统的互配合,达到了智能停送电的目的,解决了一般低压开关柜远距离停送电、危险性高的问题,提高了实用性,降低了工作危险程度,优化了停送电方式。
附图说明
16.图1为本发明的系统平面布置示意图;
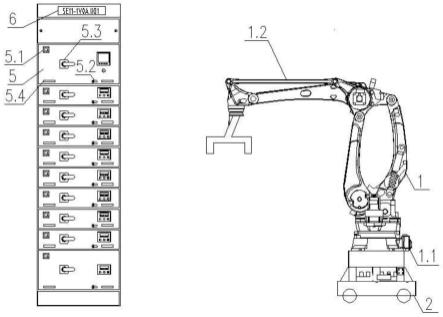
17.图2为本发明的系统立面布置示意图;
18.图3为本发明的抽屉单元面板布置示意图;
19.其中:1、柔性协作机器人;1.1、主控单元;1.2、机器人手臂;2、轮式移动agv小车;3、plc控制系统;4、信号收发器;5、抽屉单元;5.1、识别二维码;5.2、位置选择开关;5.3、断路器操作手柄;5.4、抽屉把手;6、低压开关柜编号识别标牌。
具体实施方式
20.下面结合附图和具体实施方式对本发明的优选的机构和运动实现的方法做进一步的说明。
21.如图1-3所示,一种低压开关柜智能停送电系统,设置在低压开关室内,包括多个低压开关柜、plc控制系统(3)、信号收发器(4)、以及柔性协作机器人(1)。
22.所述柔性协作机器人(1)包括主控单元(1.1)和机器人手臂1.2,机器人手臂1.2的末端设有末端执行器、视觉识别系统、激光测距仪、以及力矩传感器,所述末端执行器、视觉识别系统、激光测距仪、力矩传感器均由主控单元(1.1)控制,所述主控单元(1.1)通过信号收发器(4)与plc控制系统(3)信号连接。
23.所述柔性协作机器人(1)设置在轮式移动agv小车2上,轮式移动agv小车2通过信号收发器(4)与柔性协作机器人(1)的主控单元(1.1)信号连接。所述轮式移动agv小车2带动柔性协作机器人(1),在低压开关室内按设定路线移动轮式移动,接收主控单元(1.1)发出的类似前进、后退、纠偏等指令信号,在移动过程中根据力矩传感器(1.5)及视觉识别系统(1.3),有效避开障碍,保障设备及进入低压开关室的人员安全,实现一指触停,无需安全围栏、光栅。
24.如图2所示,所述低压开关柜的顶部设有低压开关柜编号识别标牌(6),所述低压开关柜内从上至下依次设置多个抽屉单元5,每个抽屉单元5上均设有识别二维码(5.1)、位
置选择开关(5.2)、断路器操作手柄(5.3)、抽屉把手(5.4)。
25.所述低压开关柜的顶部设有低压开关柜编号识别标牌(6)以及抽屉单元(5)上的识别二维码(5.1)为终端识别系统,一个低压开关柜编号识别标牌(6)对应一个低压开关柜,一个识别二维码5.1对应一个抽屉单元5。低压开关柜编号识别标牌(6)和识别二维码5.1均与柔性协作机器人(1)的视觉识别系统(1.3)信号连接,用于柔性协作机器人(1)识别定位需要执行停送电操作的低压开关柜以及需执行停电操作的抽屉单元5。
26.信号收发器(4)安装在低压开关室内,保证低压开关室内信号强度,且信号收发器(4)与plc控制系统(3)、主控单元(1.1)信号连接,实现停送电操作指令有效传输。
27.所述plc控制系统(3)安装在专用的plc室内,能够接收用户指令,将用户指令编译为机器语言,plc控制系统(3)与信号收发器(4)信号连接,发出停送电操作指令并接收现场返回的操作信号。
28.上述低压开关柜智能停送电系统的控制方法,包括如下步骤:
29.(1)plc控制系统(3)通过信号收发器(4)向柔性协作机器人(1)发出的对某个低压开关柜的某个抽屉单元的操作指令。
30.(2)柔性协作机器人(1)接收plc控制系统(3)的指令,通过视觉识别系统(1.3)、低压开关柜编号识别标牌(6)及识别二维码(5.1),指令轮式移动agv小车2带动柔性协作机器人(1)到达指定低压开关柜。
31.(3)根据激光测距仪(1.4)确定位置,柔性协作机器人(1)通过末端执行器执行停送电操作指令。
32.(4)当执行停电操作时,末端执行器(1.2)操作断路器操作手柄(5.3)执行分闸指令,断路器操作手柄(5.3)指向分闸位置,然后将位置选择开关旋转至移出位置,最后拖拽抽屉把手(5.4)抽出抽屉单元(5),完成停电操作程序;当执行送电操作时,末端执行器(1.2)操作抽屉把手(5.4),将抽屉单元(5)推入低压开关柜腔体中,然后将位置开关旋至工作位置,最后操作断路器操作手柄(5.3)执行合闸指令,断路器操作手柄(5.3)指向合闸位置,完成送电操作程序。
33.通过以上操作,柔性协作机器人(1)实现停送电智能操控,提高了实用性,降低了工作危险程度,优化了停送电方式。
34.综上所述,本发明应用于低压开关柜智能停送电系统,解决了一般低压开关柜远距离停送电、危险性高的问题。同时,在多重安全技术措施的保障下,通过机器人代替人力,实现停送电智能操控,既解决了电工跑腿奔波和人员不足的问题,又保障了作业安全。
35.最后应说明的是:以上仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,但是凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1