一种视频播放的控制方法、智能电子设备与流程
[0001]
本公开含利用可感知外部物体触发时长的传感器或传感器组,在此基础上,结合具备可感知方向能力或感知触发速度能力或可感知触发压力能力的传感器或传感器组,通过监测、识别外部触发,并根据触发时长与方向型触发、速度型触发、压力型触发之间任意两者正交或与多者正交,形成多维度触发编码表。该多维度的触发编码表与目标被控电子设备的功能、状态或其上运行的app的功能、状态以及使用场景结合,形成指令编码,当在对应状态、功能下监测到对应的指令性触发后,执行对应的指令及功能,从而让智能终端或者电子设备的使用者可以在语音、声音、震动、tts以及其它形式的可被使用者认知的信号提示下,通过接触式或非接触式触发传感器或组来操作控制智能终端或者智能电子设备(本方法不仅是针对智能电子设备的某几项功能的控制,而是有效的操作智能电子设备)。这种方法特别适合于驾驶、运动或其它不便用眼、用手控制智能终端、智能手机等智能电子设备的场景下(非静态场景或准静态场景),是对现有智能电子设备在运动、驾驶时不能安全、方便使用的一种有效的解决方法,本方法是面向非静态场景下操作电子设备的一种有效补充,也适合于通过传感器控制智能电子设备控制的机电一体设备,同时该方法也特别适合特种领域的使用,比如军事领域中狙击瞄准时,狙击手与后方指挥单位的可以紧密通信协作但又不影响狙击瞄准,而今天狙击手瞄准准备时又必须与指挥方步话机通信时,往往因为一只手用于操控步话机,而一只手用于瞄准,则瞄准精度下降而丢失作战时机,目前单兵作战系统的智能化程度日高,而作战人员利用单兵系统时比如通信系统时又不得不一手持枪一手操作电子设备,这导致失去很多良好作战时机。
背景技术:
[0002]
人们通常通过“按键”来控制电子设备,通常有物理的按键也有触摸屏上定义的“键”。特别是智能电子设备、智能终端、智能手机等兴起后,这些设备的功能日益复杂,这就导致了使用者使用时必须用眼睛定位“键”,用手指来按键,通过这种大家都熟悉的方式来控制电子设备,但实际上在驾驶、运动等场景下,这种电子设备的控制方式显然会给使用者带来极大的风险。目前主要国家交通事故方面的数据都表明,驾驶时使用手机是目前最主要的造成交通事故成因之一。在各种运动场景下,人们也离不开智能电子设备,但在控制使用时,同样也需要用眼睛、指头配合来完成控制,这就势必导致运动者要放慢、改变、中断原来的运动状态。而对于需要室外作业的人员如快递人员,遇到下雨时,手、智能手机、终端的屏幕沾水,导致这些设备都不可、不便操控。遇到天冷带手套时,大家都需要脱了手套,掏出智能电子设备来操作。而业界对于这些场景下的智能电子设备的控制均没有做太多切实的解决方法,虽然有语音识别技术可以用于控制,但在户外风噪、噪音,驾驶时车体噪音等状态下,语音识别都不能满足正常控制需求,部队作战时,单兵系统没法靠语音识别控制。而语音识别的技术受制于信噪比,使用场景,而运动、驾驶时的噪音又不能被规避,所以必须要有更切实的技术与方法来帮助人们。而本方法是利用与智能电子设备有线/无线互联的含传感器或传感器组的设备或本身就是与智能电子设备一体的传感器、传感器组等(内置
传感器或传感器组),监测传感器或传感器组的触发,并根据触发的方向、触发的速度、触发的力度、触发的时长,形成触发编码,并与智能电子设备的状态、功能结合(正交)形成触发指令,智能电子设备的使用者在语音、声音、震动的或其它可被认知的信号提示下触发传感器,当监测到对应的触发与对应的状态、功能时,执行对应的指令或者功能, 从而让简单的适合在运动、驾驶时的触控技术应用于人们的生活,让人们在各种场景下使用智能电子设备时更安全、更自由、更方便。智能电子设备通常含中央处理器cpu控制,使用者通过人机交互界面与其进行交互,以实现操作与控制;智能手机、智能终端、智能对讲将、智能手表、智能耳机、汽车上的控制面板与控制系统或其它类型电子设备中含cpu等程序控制功能的电子设备均属于智能电子设备。本方法是对本发明人在先发明wo2016192622a1或已授权专利cn2016103632799在更全面场景下的优化及补充,通过增加了压力型与速度型触发,并将时长或时长与方向的正交的触发编码方法再正交触发速度或触发压力,从而适应更多的场景使用,例如wo2016192622a1在登山杖这个使用场景下,如果增加压力维度,显然场景使用性就会高于仅用时长来操作与控制,在军事场景中,如果采用压力型触发指令,如单兵作战时,则战斗与电子设备的控制两不干扰,可以解决今天在实战中一直存在的制约。
[0003]
业界对语音识别、唇语识别以及手势雷达的技术都有所探索,但是在运动、驾驶、全天候以及中、快速运动场景时,我们发现语音识别技术因为环境噪声、风噪(自然风或运动速度造成),导致识别率不能符合人们的对智能电子设备操控的基本诉求,而唇语识别要求较好的光照度以及对应的采集唇部变化的设备以及采集空间及位置,而运动、跑步时该方法显然不可行,而在驾驶时,夜间也会有照明的缺陷(全天候),所以唇语识别虽然比语音识别更符合驾驶场景,但也要依赖车内照明,而我们知道夜间车内照明强度过高时,直接影响对外部物体观测而导致交通事故;而手势雷达在跑步等运动时,显然也不可取,因为运动中手很难固定在手势雷达的探测区域内做连续手势,而且冬季时,必须先脱去手套,所以很多实用场景也不能采用该技术。而业界一直忽略了触控技术,本方法的实质就是用传感器结合触发的多个维度与被控设备的状态、功能正交,在语音、声音、震动的提示下,通过传感器触发来控制具体的功能或状态的切换,使智能电子设备可以在今天不能被很好使用的场景下依然能服务于人们;而在特种环境下如军事作战时,上述如语音识别等技术至少在单兵环节没法使用,而本方法,则可以有效的解决单兵作战时,作战人员对通信等单兵电子的设备控制同时又不影响作战,从而解决今天实战中控制电子设备时,就必须把操作枪械的一只手占用,从而让作战人员失去有利时机或造成没有必要的风险,这是今天一直没有被有效解决的问题,而使用本方法,配合能监测触发时长,监测压力的传感器,就可以在双手握枪时,可以操作控制单兵电子设备,而无需影响作战。
技术实现要素:
[0004]
为了克服目前智能电子设备使用时,对使用者的手、眼强制依赖,本方法是利用可感知外部物体触发方向、触发速度、触发力度、触发时长的传感器或传感器组,通过监测、识别外部触发,并根据触发时长以及触发方向、触发速度、触发力度等,形成触发编码,并与智能终端、智能手机及智能电子设备的功能、状态或其上运行的app的功能或状态结合(正交),形成指令编码,当在对应状态、功能下监测到对应的触发时,识别为对应的指令,并执行对应的指令及功能,从而让智能电子设备的使用者可以在语音、声音、震动以及其它声光
组合提示下,通过触发传感器来控制智能电子设备。该方法可以使智能电子设备的使用者在语音、声音、震动、tts的提示下,通过传感器、传感器组来控制智能电子设备,而不需要眼睛、手指甚至手的参与就可以完成今天必须靠眼睛与手指才能操控的智能电子设备,而使用本方法的智能电子设备则可以规避现在全球普遍存在的“低头族”现象,使交通事故或意外事故数量降低。
[0005]
具备感知外部触发方向的传感器有多种,比如雷达、手势雷达、手势传感器、两个及以上有距离相隔(比如5cm)的接近距离传感器组、导电纤维织物、触摸屏等,根据触发可以分为接触触发与非接触触发,比如导电纤维织物的传感器需要接触触发而雷达、手势雷达等均无需接触触发。
[0006]
具备感知速度的传感器也有多种,比如两个相隔5cm,精度很高的接近距离传感器组,当第一个被触发时间为t1,而第二个触发时间为t2 , 则速度就是5cm/(t2-t1),对于雷达传感器,当精度达到要求时,存在两个及以上接收雷达反射波的传感器就可以算出触发物体的触发速度;当然还有接近的触发速度,比如精度高的接近距离传感器及激光脉冲反射传感器,都可以测得接近速度;当然触摸板、屏上a点(x1,y1)到b点(x2,y2),比如指头滑过后,两点的距离除去两点的时长也可以测得速度,这样快速与慢速就可以被分辨出来,比如在音乐控制上,快速代表快进,而慢速代表下首歌曲,结合方向性,就可以成为歌曲的快进(快退)或者下首(上首)。在接触式或者非接触式传感器下,这都是很有用的触控方法,如自行车运动,高山速降滑雪的运动头盔上有时长与方向及速度触发的正交后,就可以带着运动手套控制运动者的通信或者娱乐设备而且不必非用接触式触发,而今天在高山速降时,运动者并不能在运动中操控智能电子设备。
[0007]
压力传感器通常用于测压力值的变化,而在本方法中,也可以用压力的轻、重以及触发时长、触发时间及触发之间的关系组成触发编码而非仅用于压力测试。
[0008]
而所有上述传感器或者相似属性的传感器或传感器组,均可以测得触发时长、所以本方法结合触发属性、触发时长、方向、速度、压力等某两项或多项的正交,就可以组成多维度的触发编码。对于本方法而言,无论声学、光学、电学还是磁场学及其中某几种组合形成的传感器,只要能准确灵敏的提供触发时长、触发方向、触发压力、触发速度及2项或多项的正交组合,形成触发编码,在与被控目标的状态、功能结合,均可以在本方法下用于控制智能电子设备。
附图说明
[0009]
下面结合附图对本方法进一步说明。
[0010]
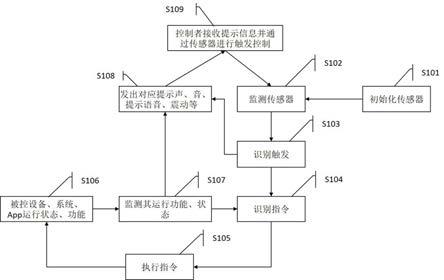
图1:本方法的概要图。
[0011]
表1。
[0012]
图2:对应于表1接近距离传感器为例的触发时长脉冲图形。
[0013]
图3:在全无线耳机上利用接近距离传感器控制电话通信的实施例。
[0014]
图4:在全无线耳机上利用接近距离传感器控制音乐的实施例。
[0015]
图5:在全无线耳机上利用接近距离传感器隐蔽求救的实施例。
[0016]
表2。
[0017]
图6:基于方向性传感器在跑步机上实现对视频控制的实施例。
[0018]
表3。
[0019]
表4。
[0020]
具体的实施方式 以下实施性示例中所描述的实施方式及具体的参数如时间、编码等,并不代表与本方法相一致的所有实施方式,相反,它们仅是与所附权利要求书中叙述的与本方法一些方面相一致的方法,既利用与智能电子设备有线/无线互联的独立传感设备或本身就是与智能电子设备一体的传感器、传感器组等,监测其触发,并根据触发的方向、触发的速度、触发的力度、触发的时长,两者或者多者正交形成触发编码,并与智能电子设备的状态、功能结合或运行在其上的app的功能与状态及使用场景结合形成触发指令,智能电子设备的使用者在语音、声音、tts、震动的提示下触发传感器,当监测、识别到对应的触发编码与对应的状态、功能时,执行对应的指令或者功能,从而让智能电子设备的使用者能在更多场景使用智能电子设备而非今天受限于某些场景。
[0021]
如图1所示步骤, s101为初始化传感器,初始化传感器的目的是让传感器在目标场景能适合目标场景的工作,比如设置采样频率、触发距离、触发阈值等。通常初始化工作在设备开机时或者开始调用该传感器时进行初始化,使其能符合目标场景,通常初始化成功后,不必再进行该步骤。
[0022]
s102步骤为监测传感器,通过该步骤,监测传感器的触发;当传感器与智能电子设备一体时,通常由智能电子设备的操作系统或电路及程序来监测其工作,如果是分体式通过无线或有线电子设备含上述传感器去控制主智能电子设备,则需要设备中的电路或程序来监测其工作,而监测到的数据通过有线或者无线链路反馈给智能电子设备,然后进行下步处理。
[0023]
s103步骤为识别触发,当智能电子设备的使用者想通过传感器控制智能电子设备时,s102监测到触发,s103则需要分析触发是否为之前定义的触发编码,比如触发、触发时长、各维度的正交关系、触发是否在对应的指令窗口内等或者误触发的信息清除。在本方法中,s103步骤需要结合多组并行的时间/时钟来分析触发、识别触发或者在触发时间窗口结束后,执行对应触发的指令或者窗口结束后的后续指令。
[0024]
s104步骤为识别指令,当识别到触发编码后,必须基于此时的智能电子设备的状态、功能结合s103识别到的触发编码,对应于预先设定的指令编码,来识别是否为合法指令,也就是本方法是状态、功能与触发编码正交。而触发指令的识别是由s104步骤实现,所以s104需要两个输入,一个是s107,一个是s103,当识别确认是指令编码后,执行s105步骤既执行指令或对应的功能。
[0025]
步骤s105为执行指令或者指令对应的功能,当功能执行后,在智能电子设备中,通常伴随着状态、功能的改变,比如音乐播放功能中,音乐播放状态,但此时收到触发指令为暂停,则执行s105后,音乐功能的状态就由播放状态调整为暂停状态。
[0026]
步骤s106为被控设备、系统、app运行状态\功能,如在电话功能、主叫拨号状态。在智能电子设备中,其操作系统通常管理所有操作系统自身功能、状态,当状态或者功能改变时,系统自己联动,比如电话通话之前的状态是音乐播放,当电话被呼叫时,音乐自动暂停,但挂机后,音乐又开始自动播放。在智能手机的操作系统中,定义了多种状态标志,供系统功能或app调用。而在app中,则是app需要自己管理自己定义的状态、功能等,当状态或者功
能改变时,app需要自己管理,自己监测。比如在系统播放音乐时,则s106为音乐功能、播放状态,而暂停时,则是音乐功能、暂停状态。而在隐蔽求救时,目前该功能智能终端、智能手机不具备,只能是驻内存的app管理该功能,当从音乐状态进入隐蔽求救功能时,默认音乐暂停,而通过s107监测功能状态变化,并通过s108提示求救者已经进入隐蔽求救功能或求救目前的状态。
[0027]
步骤s107是在所需要监测的状态是非系统自身功能、状态或者是状态、功能组合非系统自身所定义时的内容,其将监测结果为s104步骤提供接口,并向s108步骤提供相应功能、状态数据。当所有功能与状态是智能电子设备系统的标准功能与状态时,s106与s107通常一体,都由操作系统完成(通常也由不同的功能模块处理),而所需功能、状态是非操作系统涵盖时,则需要用操作系统外的程序来管理及监测。
[0028]
步骤s108是用声音、语音、震动等提示智能电子设备的使用者,也就是可被使用者认知的提示,比如正在播放音乐时,正在播放的音乐就是状态提示,而在电话时,振铃音就是状态提示,而在切换菜单功能时,则是通过tts(text to speach)告诉使用者菜单项目,而在隐蔽求救时,则是以震动形式告诉求救者,这样避免语音提示时被实施伤害者知悉。所以在s108步骤,有些功能按照系统规程与使用者习惯,而有些则需要特别定义,定义时就要根据s107提供的数据与场景定义用tts还是声音还是震动等或者它们的组合,因为本方法的人机交互是面向非静态场景,而传统gui的人机交互则是面向静态场景,非静态场景中可变因素远多于静态场景,所以就需要更多的提示方法,比如tts在手机系统中,只支持有限的语言,所以在提示时,就需要播放提前录制的语音录音,或者通过互联网将菜单信息发送能提供tts服务的服务器,再播放反馈的声音文件,所以情景、场景结合是本方法的一个特点而如多点触控技术(发明于2004年)或者鼠标键盘加gui的人机交互(发明于1963年左右)就不具备该特点,这是由于电子设备的使用者在运动、移动、驾驶、战斗等行为中,使用者的状态瞬息万变,而依赖眼睛与手指是不能满足于这些场景的基本前提。
[0029]
s109步骤是智能电子设备的使用者一方面根据s108的提示来判断自己所处的功能与状态,另一面根据自己的诉求触发传感器,将功能与状态切换到自己诉求的功能与状态。
[0030]
值得注意的是,在s103步骤,当有触发发生时,可以通过s108步骤提示触发者,比如识别到一个短触发,则发出一个短触发的“滴”声提示,而s103识别到一个长触发后则通知s108发出一个长触发“嗒”声的提示,至于是否使用何种提示视场景功能与便于人机交互。而关于对短触发、长触发以及更长时长的触发见表1。
[0031]
接近距离传感器为例的触发编码表 表1是以接近距离传感器为例的时长触发编码表,可用传感器加时钟形成监测触发脉冲宽度的电路与系统都可以形成该表,如电容屏与时钟电路结合,如果用等同的策略如按键开关加时钟,也可以形成该触发表,但在智能电子领域中,使用者通常会面临功能劣化,如在智能耳机中,会有机械噪音与压痛与不适。在智能手机中,接近距离传感器用来控制在通话时屏幕的明灭,一来避免脸、耳部误触发触摸屏,二来省电,而利用本方法,则该传感器却可以用来操作控制手机的各种功能及app。
[0032]
接近距离传感器在智能手机中通常将接近当做1,离开当做0,而通常探测距离为5cm,假定触发的开始时间为t1,触发结束的时间为t2,设定t2-t1<=450ms为短触发即图2中p101 的触发脉冲宽度t2-t1<=
△
t1,
△
t1=450ms,而450ms<t2-t1<=1200ms为长触发即图2中p102脉冲,
△
t1<t2-t1<=
△
t2,其中
△
t2为1200ms。从图2中,可以看到对应的脉冲波形图p101与p102,如果我们将短触发定义为“·”(滴),而长触发定义为
“-”
(嗒),这就是摩尔斯码的编码基础,也就是说可以用摩尔斯编码形式制定触发编码,这就是表1中以摩尔斯码形式,当然也可以用二进制形式,比如用0表示短触发用1表示长触发,则就是表1中以二进制形式为表现的编码表,但实际上,无论摩尔斯还是二进制形式,都是来源于表1中以时长触发编码表为基础的短、长触发编码表,因为使用了短、长触发,而且使用了多位,所以自然就形成了2维度的触发编码表,至于用何种形式如二进制或者摩尔斯视情景而定。值得注意的是该触发编码在被控设备某状态或者功能下,需要控制的指令特别少或者不需要分辨长、短触发时,也就是短长触发等同时,可以是计数编码,触发一次计数一次,比如本说明书后续隐蔽sos实施例中会讲述为什么又用次数而长短编码。在表1中的更长时长触发p103通常是大于长触发上限值如本例中大于
△
t2也就是大于1200ms的触发,该触发也是1位指令,但通常用于状态切换,或者某些特定功能如步话对讲时的声音输入,录音,比如触发超过更长时长门限后如大于1200ms(长触发的时长上限)就开始录音,而解除触发,录音就结束(p103中t_end)。当然该更长时长的触发在某一状态或功能下,没有长短触发指令,只需要更长时长时,就不需要上述的门限值1200ms,因为上述门限值的出现是规避有长、短触发时造成误触发,比如一个长触发时900ms,如果不设这个门限值,则长触发时,就可能已经执行了
900ms的指令,但发现该指令原来是长触发而非更长时长触发,当在不需要鉴别的状态功能下也就是除了更长时长触发没有短、长触发时,就可以采用不需要门限值的策略也就是p103中t1=t2这种特例。
[0033]
如果将“·”当做0,
“-”
当做1,则就是多位的二进制编码,如果我们不关心触发是“·”还是
“-”
,也就是不分辨长、短触发,特别在简单控制功能场景,可以用次数来形成触发编码。但我们采用了一种更巧妙的编码方式,就是触发的时间、时长与相邻触发之间的关系,形成触发编码,根据场景选择使用何种编码触发。
[0034]
如果根据具体场景,t2-t1的时长可以是其它
△
t,我们可以根据
△
t1、
ꢀ△
t2、
△
t3
…
形成多进制编码,虽然表1没有列出多进制编码形式,但实际上本方法在触发编码灵活的地方就是根据触发、触发时长,可以根据场景灵活组织编码表,而表1不过是触发编码的最基础元素的列表。
[0035]
对应于“·”、
“-”
,可以非常简单的实现“·
-”
、
“-
·”、
“--”
、“··”四组2位编码,加上一位的“·”、
“-”
,和更长时长,就在最多两位编码时可以有7个触发编码。对于某状态或功能下是变长触发编码时,也就是在某状态下既有1位、2位甚至3位指令时也就是变长触发指令时,都需要设置触发驱动的指令窗口,在指令窗口内输入对应的触发编码,这是因为在触发时,如果不采用与触发指令并行的指令窗口,且是由触发驱动产生的并行指令窗口,则不能鉴别出指令、只能重复的执行一位指令。最直观的容易被理解的例子就是在a状态下,第一个触发时,启动了一个指令窗口,窗口期是3秒,在3秒内如果输入了0、0,则执行00的指令,而如果3秒内只输入了0,则执行0的指令,而如果没有指令窗口,则上述输入00指令的触发会变成执行一次0的触发指令,再执行一次0触发的指令,而不是00对应的指令。指令窗口通常与状态与功能有关,所以在窗口期内,窗口期结束时或结束后,都会执行状态与功能对应的操作。如3秒内输入00指令,结果使用者在2秒内就输入了00,而对应功能下,窗口期中只需要输入两位指令,所以系统不必等到3秒结束时才执行指令,而是收到00不再判别就执行指令并关闭指令窗口。而如果3秒内输入了一个0后,后续没有指令,则等到3秒时执行指令,并关闭该指令窗口或等到3秒减去一个值,而不必非等3秒。指令窗口也可以是一位触发后开启一个并行窗口,这个窗口如长度是800ms,在这个窗口内有下个触发,如果这个窗口中没有触发则指令输入结束。如果有下个触发而在该状态下有多位,则第二位触发后继续开启一个800ms的窗口,以判别是否有下个触发或者指令已经结束,如果该功能下只有两位,则第二个触发就不必开800ms的窗口。上述只是对并行指令窗口的两个举例,其实这两例子只本质一致,就是通过鉴别在触发驱动的给定时间内的触发来判别指令是否结束,当然还有本质相同的鉴别方式,不外乎从第一个触发的t1开始设窗口,还是t2开始设窗口,窗口期按照最长指令开还是相邻触发最大时间开还是相邻触发最大时间加最长触发时长开窗口。因为在触控场景下,定长指令(固定长度指令如都是3位指令)远比变长指令(一个功能或状态下使用含1位、2位或更多位不等长的触发编码)难用,所以使用变长指令时,多位不等长即变长触发编码时,指令窗口的使用会让操作与控制更方便,否则多位变长指令不能被识别出来。
[0036]
在图2中,还定义了更长时长的触发p103,其中t1是触发开始时间,t2是判断触发是更长时长触发的阈值(实际上就是大于图2中
△
t2),也就是超过该值,触发依然没有解除,才能判断是否是更长时长的触发,超过t2时长后,开始提示用户如“录音功能”,也就是
在t2后通过声音、语音、tts或者震动告诉使用者“录音功能”,此时用户听到录音功能后解除触发,也就是t_end落在t2与t3之间,就执行进入录音功能的指令,然后进入录音功能,在图上2中,我们可以看到,t2开始提示,而t3是提示结束后再加一个时长如2秒用于人反应,等待用户选择该功能的时间限,如果用户没有选择该功能也就是没有解除触发,则超过t3时提示下个功能如“sos”,而用户在t2到t3之间的解除触发就是选择,没有解除触发就是继续选择其它功能,以此类推,更长时长的触发可以选择更多的功能与状态,比如进入“语音识别”功能,在场景容许时就可以用语音识别操作智能电子设备,图2中的t_end就是解除触发的下跳沿,该下跳沿发生的时间如在t2与t3之间,表明选择t2后提示的功能,而发生在t3与t4之间,则表明选择t3时提示的功能或状态。提示是声音、语音、tts或者震动,提示时长与等用户反应的时长整体组成了功能与功能之间的选择间隔,比如t2时,播放录音功能用了2秒时间再加一个两秒时间也就是t2到t3时间是4秒,比如t3后提示sos是1秒,但该功能因为很重要,所以留4秒的反应时间,也就是t3到t4是5秒,而t_end时间落在t2到t3之间或t3到t4之间,决定了那个功能被选择或执行。值得一提的是,如果只有一个需要切换的功能或者状态,可以使用提示也可以不使用提示(声音、语音、tts、震动),因为用户知道更长时长的触发后会无歧义的执行一个指令或到一个状态、功能,此时只需要判断p103中的t大于t2时,就可以执行指令而非要等t_end,也就是解触发,此时更长时长触发就是一个大于t2阈值的触发,当大于阈值时就执行指令,如用更长时长的触发开、关智能电子设备,触发时长大于t2如3秒,则系统关机或开机。
[0037] 在本发明人在先发明wo2016192622a1中,大量使用了指令窗口,而在本说明书中,将指令窗口的使用了做了更深层次的应用,如图2中p104,该脉冲形式是说明在触发驱动的并行窗口期
△
t3内,有触发且触发为短,对应于【0034】段中
△
t3=800ms,也就是将两次触发之间的时间间隔定义为小于800ms为一种触发如p104中定义的“·
s
·”(其中用s代表触发间有一个短/short时间间隔),而将p105两次短触发定义为在
△
t4内如【0034】段中的3秒,如果一次短触发最长450ms,两个短触发一共耗时最多900ms,其中至少2100ms可以作为两触发之间的间隔也就是t3-t2<=2100ms(如果两个短触发时150ms与300ms,则这个间隔最大为3000ms-150ms-300ms),如果将2100ms>t3-t2>
△
t3作为在该3秒窗口期中的两个脉冲之间的间隔,使用者在触发传感器时,两个指令窗口都并行使用时,会出现“·
s
·”和“··”,在一位触发输入时,毫无疑问,会等到窗口期结束时执行指令,而两位时,则出现了两种形态“·
s
·”和“··”,在某一个状态或者功能下,p105窗口作为一个窗口,而p104作为另一个窗口,p105将p104包含在内时,当触发收到
·
s
·
,就立即执行
·
s
·
的指令,而超过p104窗口期后,又收到第二个触发,则执行“··”对应的指令,这在具体使用时,就是触发者连续快速(极短触发间隔)触发或者连续但不快速(正常速度的触发间隔)触发两种不同节奏的触发,执行不同指令,以两位编码为例,就是由“··”、“·
-”
、
“--”
、和
“-
·”与“·
s
·”、“·
s
-”
、
“-
s
-”
、和
“-
s
·”8个触发编码, 也就是两种指令窗口下的套用,可以在某些功能或状态下,有效减短触发指令位数或者增加该功能下的可控制指令。在专利cn2016103632799中,只是使用了指令窗口,但没有使用指令窗口套用形成的扩展触发编码,而本方法中增加该触发能力,从而让更简短的指令服务更复杂的功能与场景。
[0038]
在图2中,描述了以接近距离传感器为实施例时,触发短、长时长的定义,更长时长的定义以及在给定时长内的指令窗口与相邻触发间的指令窗口套用时的逻辑关系,从而利
用触发时长以及触发相关性更好的服务于非静态场景下的智能电子用户,这是本方法的基础部分。因为采用的实施例是智能手机内置传感器接近距离传感器,而对于其它可感知触发时长的传感器或传感器组,如压力传感器,同样可以获得触发时长,但脉冲形态就不一定是标准方波,如压力传感器可能产生的是齿形脉冲或者非规则脉冲,但却可以监测触发开始时间与触发结束时间,所以但凡使用本方法的利用传感器或者按键加时钟用同样方法监测触发时长,触发时长之间的关系来实现操作控制的电子设备,恰恰是本方法的一个具体实施例,只是是不是劣化功能而已。
[0039]
需要再强调的是,以上以触发时长形成的触发编码并不是触发指令,触发编码与目标被控设备的状态、功能结合,场景结合才形成触发指令,所以触发指令是多个表如触发编码表与功能、状态表结合、正交,在对应场景下(有特殊性时)编制最便于触发的指令。
[0040]
自2016年,苹果推出全无线耳机air pods,但这款产品是靠语音识别来控制,但实际上在户外有风,运动速度比较快时,环境有噪音,或者所处环境不能发声时,该全无线耳机就不能被很好的控制,对于电子设备而言这是一款非全场景的产品。后来有其它耳机厂商跟进了类似产品,但鉴于苹果air pods的弱点,增加了控制键,以弥补苹果air pods的产品缺陷,但由于全无线耳机都很轻、小,当然按键也非常小,所以运动时基本不能控制,如果想进行控制,则都会改变、中断、停止运动状态后才方便控制,而且这类产品均使用了左右耳两侧控制模式,导致单耳使用时部分功能就缺失,这显然也是有缺陷的产品,而针对未来耳机作为控制器与反馈器来反向操作智能手机时,这些技术都无法胜任。而本方法则可以有效的根治以苹果为代表的全无线耳机这类产品的缺陷,使其能全场景工作,而且能作为控制器与反馈器来操作智能手机,而不必占用户的手与眼。
[0041]
还是以接近距离传感器为例,在全无线耳机中装入接近距离传感器或者触屏(苹果air pods本身含有该传感器),并通过触发该这类传感器来控制电话的接、拒、挂。
[0042]
如图3所示,该图是本方法在全无线耳机下实现电话接、拒、挂的一个实施例,其中a201,既左侧框是智能手机的通话功能与基本状态,也就是本方法提及的s106、s107步骤。由于通话功能是由操作系统来完成功能与状态管理的,所以在本例中s106与s107都由操作系统完成,而s104等步骤只是从操作系统对应接口读取相应状态、功能。
[0043]
通话功能中通常有s201通话状态,就是已经进入通话中,s202为主叫回铃状态,也就是本机拨打了对方电话,而且拨通了对方,对方已经回铃,但还没有接起电话;s203为被叫振铃,也就是本机被他人呼叫还没有接起电话;s204为非通话状态,也就是不在通信状态中,对应于电话的功能与状态,本例中只是简单的举例,而关于通信的相关细节规程,可以参照itu-t的具体文件,全球均按照该规程执行。
[0044]
中间大框是s104识别指令步骤,其中有s205至s208,是4组已经识别的触发编码,该触发编码使用了指令窗口套用,s104根据此时的功能与状态及识别的触发,识别具体的指令,然后执行s105步骤既右侧大框中的s209至s211,电话的接、拒、挂,当执行完对应指令功能后,左侧a201大框中的状态随之改变。
[0045]
s201是通话状态,此时如智能手机的使用者想挂电话,则触发s205“·
s
·”或s206“··”,也就是触发全无线耳机上的接近距离传感器或触屏,当s103识别到触发并将识别的触发提交给s104后,s104根据状态与触发编码对应预先设定指令,识别指令并执行s210 挂断指令,当s210挂断后,状态改变为s204状态即非通话状态。
[0046]
s202是主叫振铃状态也就是作为主叫呼叫并被回铃了,说明本机拨打了某电话,而此时如果主叫不想继续该呼叫,则还是触发s205或s206,s104收到被识别的触发编码,结合状态,则执行s210指令。
[0047]
s203是被叫振铃状态,说明此时作为被叫有人呼叫,如果想接电话,则触发s205或s206,s104识别状态与触发为定义指令后执行s209接听指令,这样通信建立,s203状态也随即改变到s201通信状态。而被叫不想接电话该怎么办呢,触发s207或s208,s104根据状态及触发编码定义的指令,执行s211拒接来电,指令执行后,状态由s203变成s204状态。
[0048]
在这个实施例中,触发编码用了s205至s208共4组,但实际上s205和s207两组就可以实现电话的接、拒、挂。在这里用来“s”与非“s”的触发组合,是想说明表1触发编码的灵活性,也就是某些状态下触发指令无歧义时,可以相对随意使用编码。
[0049]
在电话接、拒、挂这个实施例中,s108在被叫振铃时,需要根据主叫的来电号码,对比电话本中具体呼叫者,并tts出呼叫者的名称,如果呼叫者不是电话本中的联系人,则tts出来电号码,以让被叫决定接或者拒,目前该功能智能电话中并不具备,而在本方法中,这只是s108在作为被叫时一个具体的提示功能。
[0050]
在图3的实施例中,指令窗口套用的方式其实没有用于差分功能,但还是在图3的实施例中加以功能扩展,如假设正在通话时,又作为被叫被人呼叫,那此时被叫有几个选择1,挂断原通话,接起新呼叫;2、拒绝新呼叫,持续原通话;3、保持原通话并接起新呼叫;在这个实际的场景下,因为实现目标不同,通常需要3组指令(因为已经在同一状态下),而使用指令窗口套用的方法时,则可以用如“·
s
-”
来执行1,用“·
-”
来执行2,而用
“--”
或
“-
s
-”
来执行3,记忆指令时,短触发代表断线,长触发代表连通,“·
s
-”
代表断了原电话,连通新电话,因为被叫怕被主叫等或怕误了重要的事情,所以要节奏快,而“·
-”
代表断了新呼叫,持续原电话,操作时可以不紧不慢,因为没有人等,也就是用户面临2的实际心里状态;而对于3,则是都连通,所以用两个长触发,两种窗口模式都支持。这样用户在记指令时,只要随着场景与心态就可以使用指令而不需要记忆太多固定指令。这样在图3这个电话控制场景下,这也是本方法的一个显著特征,就是场景结合,不只是使用场景而且还有使用者可能的情绪场景。而这种功能的实现在今天人机交互领域中,显然是没有考虑到的,这是因为现有技术太局限与鼠标键盘+gui或gui加多点触摸的人机交互形态,而没有考虑非静态场景,特殊场景使用者可能面临的问题。
[0051] 在音乐功能中我们通常定义三个最简单状态如图4所示,就是s301音乐暂停状态,s302音乐播放中,和s303音乐停止状态,图4的实施例仅采用图2 中p104这种指令窗口。
[0052]
在s301音乐暂停状态时,如果全无线耳机的使用者想开始听音乐,则触发s306,当识别到触发为s306定义的“·
s
·”时,且现在处于音乐功能的暂停状态时,则识别指令为播放即执行s311播放音乐,而s311执行后音乐播放的状态就改变成s302;s302是音乐播放中,此时如果想切换为下首歌曲,则触发s304编码,即一个短触发,而且短触发结束后s时间内没有其他触发(指令窗口内无其他触发),当满足上述描述后又是在播放状态,则识别该指令为切换到下首歌曲即执行s309,切换到下首歌曲后,状态依然是s302状态,如果想切换上首歌曲,则触发s305编码,也就是一个长触发,且在长触发后s时间内没有其他触发(指令窗口期内无其他触发)。当满足上述描述后又在播放状态,则识别该指令为切换到上首歌曲,即执行s310。如果在音乐播放中想暂停播放音乐,则触发s306,如
果在音乐播放状态识别到的触发时s306即执行s308指令,暂停音乐,并将播放状态调整到s301音乐暂停状态。如果在s302状态想停止播放音乐,则触发s307,如果识别的触发为s307 则执行s312音乐停止指令,并将音乐的状态改变为s303音乐停止。而在s303音乐停止状态想播放音乐,则触发s306,当识别到该触发后,即执行s311播放指令,s311执行后状态切换为s302,音乐进入音乐播放中。
[0053]
在本实施例中,我们看到1位触发与2位触发在同一个状态下的触发使用,使用了图2中p104的指令窗口定义,我们用了“s”,就将1位触发及2位触发分辨出来了,再与所处状态、功能正交,其实已经是多维度的触发编码,所以本方法可以用简单1位或2位触发,实现对智能电子设备的控制。而在全无线耳机这个场景中,通过传感器,则可以轻易的实现在噪声、运动场景下的音乐控制,而今天苹果的全无线耳机air pods则做不到(只能语音识别控制,噪声时,或者通话时,调整音量显然有产品缺陷),而业界类似产品均有运动、噪声下控制不便的情况,而采用本方法后,则可以解决这类产品的缺陷,使其能适应更全面的场景。当然在图4中也可以使用p105所定义的指令窗口,实现的结果一样,如果缩减p105的t4-t1之间的时长,当缩减到一个值时,p104与p105完全等效,也就是在图2中t3-t2<=
△
t3时,所以正如本说明书前面所述,这类指令窗口,目的方法是一样的,只不过是窗口开始从何处启动,何时结束。在图2中p104与p105定义时,是为了说明后续两种窗口套用模式,定义了p105的t3-t2>
△
t3,当两个窗口没有必要套用时,图2中p105就没有必要这样定义了。
[0054]
图5还是基于全无线耳机这个场景,实现隐蔽求救功能,目前业界的智能手机并无隐蔽求救功能,这导致智能手机的受害者遇到攻击、抢劫时不能利用智能手机及附件隐蔽求救,从而减少伤害与损失,为何使用隐蔽求救是因为很多时候受害人没有机会打开屏幕拨通号码说清楚地点、事件,而且在这些场景下,受害人如果被发现使用手机会直接激化伤害程度。而采用隐蔽求救功能,则利用智能电子设备的位置功能、语音采集功能将现场的位置、现场的声音信息均能实时的发送给援救者,从而让援救者可以有效的进行救援,而他人并不知道已经发出求救信息,所以争取足够的时间就能免受伤害或减少可能的伤害。关于隐蔽救援的方法见本人在先专利cn201510835747.3。
[0055]
在图5中,还是以全无线耳机为例来实现隐蔽求救功能,该功能在目前各种耳机中都不存在。当进入求救功能后即进入图5左侧大框隐蔽求救的功能及状态,由于隐蔽求救在今天智能手机等智能电子设备的系统中并不存在,所以需要驻留内存的app或具备该功能的app实时的管理与监测其状态,所以s106、s107均需要对应的app来实现(显然未来sos功能会成为智能电子设备的必备功能)。在进入该功能后,有4个状态,s401求救触发状态,s402求救发送状态,s403求救送达状态与s404求救响应状态。
[0056]
在s401状态,意味着使用者已经进入了隐蔽求救功能,此时求救者如果触发s405或者s406编码,则s104步骤识别指令为进行s407一级求救或者s408二级求救。
[0057]
进入s401状态,通常可以采用更长时长的触发,当使用者听到/感觉到(震动)例如sos的提示后,解除触发,就就进入了s401状态,所以任何app或者智能系统或者操作系统都可以增加sos功能,而且触发靠内置或者外部传感器。
[0058]
其中s405与s406在本实施例中用了次数触发的编码,也就是识别给定指令窗口中触发的次数,比如s405是2次触发,而s406是3次触发,这是因为在紧急情况下,只要触发就可以,而通常紧急状态时,不是所有人都能很好的控制好触发,所以只要触发够次数即可。
这也是本方法灵活的触发编码的示例,以求在各种场景下都能满足使用者的诉求。
[0059]
对于s407、s408为何要求救分级,是因为求救者根据情况向预先设定的救援者发出求救,比如是小问题,可能是让预先设定的人来帮忙解救,而如果遇到很严峻的问题,则是二级求救,直接向司法机构求援比如警察等。当执行了对应的求救指令后,即执行了s105中的一级或者二级求救后,状态切换到s402求救发送,国外有些求救app ,求救是通过短信发送,但实际上发送后并不能检测到信息是否已经送达,而在完备的求救过程中应将求救达到何种状态让求救者知悉,以便应对操作。若求救发送成功后,会有响应信息表明求救信息已经发送到预先设定的救援者,如果救援者已经开始响应救援,则状态切换到s404,此时求救者就会比较安心的等待救援了。
[0060]
在s402到s404状态时,如果救援者还有能力触发求救,当然还可以触发s405与s406编码,这样救援者也能知道求救者暂时还有能力发出求救信息以及求救者已经很急迫。
[0061]
在这个实施例中s108也就是提示信息会变成短震动(在智能手机上),而不是语言或声音,目的是让求救人更隐蔽而不是因为声音等信息而暴露,而在耳机上可以是震动或者语音提示。
[0062]
通过上述几个实施例,我们可以很清楚的了解本方法是如何在全无线耳机这个设备中实现对电话、音乐以及隐蔽求救的操作与控制,当然该方法也可直接在智能电子设备如手机中实现。而无论智能手机还是全无线耳机,目前均无上述实施例的功能。
[0063]
下面我们以能感知方向性的传感器为例来说明本方法,可感知方向性的传感器分接触式与非接触式,非接触式的通常通过光学、声学、磁场学的反射以及电磁场的变化来识别触发的方向,而接触式的通常通过压、流、阻的变化在传感器上具体(x,y)点或传感器上具体(x,y)点的电压、电阻、电容等被触发后的变化来判断接触位置,而(x,y)的变化轨迹就是移动方向。所以对于本方法而言,强调的是方法而非具体使用哪种传感器来实现,就如两个接近距离传感器可以感测a到b方法或b到a方向的触发,但在坐标系中无需定义,而在触摸屏,导电纤维,电容屏中则需要用坐标定义触发点及轨迹,而无论哪种形式,在本方法中只需要的是一个被识别出的触发结果就是“方向”性触发。
[0064]
所谓方向性触发就是如向上、向下、向左、向右、向前、向后等表示空间位移的触发,当然也包含顺时针方法,逆时针方法,在此处就不一一列举了,但这类触发是一次触发时,都是一维触发编码,但是如果方向性触发组合后,就会组成2维触发编码表。如一个向前触发代表执行下首歌曲的指令,而两个连续的在时间窗口内的向前触发就代表音乐快进,这样方向性触发表与表1正交,就会构成更丰富的触发编码表。
[0065]
表2是以具备感知a至b方向或者b至a方向触发的传感器为例来说明方向性触发编码表,因为在本说明书中,将方向也正交,所以方向本身也可以形成2维编码表,至于使用那个编码则视功能、场景,而实际上手势传感器、手势雷达或者2个及以上接近距离传感器以三角形或菱形布局的传感器组都可以感知多个方向的触发(2个时只能a到b向或b到a向),而表2只是为说明这本方法而非将所有触发方向都一一罗列,所以只用两个方向做示例,实际上方向性触发形成的二维表远远大于时长触发形成的二维表,所以用于示例性描述本方法在触发编码方面的特质,并不是完全代表所有触发方向编码的组合,且恰恰相反,只是本方法一个最简实施例。在表2中,我们知道知道只使用1位方向触发时,会形成一个1维度的
触发编码表比如向左触发、向右触发、向前触发、向后触发,但实际上在2位触发时,就是一个两维度触发表,如上表2,因为我们在触发控制时,要将触发表中的编码结合功能、状态以及使用场景,所以会选出适合该功能、该状态、该场景使用的编码,如音乐快进,则可以用两个向右的触发,而音乐快退则用两个向左的触发。而在某些状态功能下,又不需要方向触发的方向性,只需要监测有方向发生的次数,就是吧分辨方向下的次数触发了。
[0066]
可感知方向性的传感器为例的触发编码表 为了方便描述,我们将b至a方向的触发定义为
“→”
而将a至b方向的触发定义为
“←”
,这样根据方向性,就可以形成表2的触发编码表,编码的方法与表1一致,只不过表1的触发是时长形式,而表2的触发是方向形式。
[0067]
而实际上表1与表2又可以组合使用,最大形成4维触发编码表,但实际上由于触发指令通常不必达到4位也就是时长、方向组合形成的4维触发表,所以通常在1、2、3位中就可以满足通常使用场景。实际上能感知方向性的传感器通常也可感知非方向性的触发,比如触发不是位移性质的触发而是接近、覆盖触发,然后结束触发,这时又可以形成表1的触发编码,所以表1与表2结合、正交,就构成了具备感知方向性触发与感知触发时长的传感器或传感器组的基础触发编码,再配合前面提到的指令窗口及指令窗口的嵌套使用,就可以实现对智能电子设备的非常简易有效操作与控制,下面的实施例就以跑步机上控制视频来说明能感知触发方向触发,时长触发的传感器在本方法下的应用。
[0068]
现在很多人在跑步机上看手机视频,但是在跑步机速度起来后,运动者想再去控制手机视频就会很困难,因为跑步机达到某个速度后,运动者就必须随着该速度跑步,而此时用手指控制视频,微调视频都会因为人在跑步时的起伏而无法准确点击屏幕上的控制键,同时由于手指有汗或者潮湿,导致屏幕触控困难,而此时多点触控的技术就无效了,而本方法则可以在这种场景下实现视频微调。
[0069]
视频特别是网络视频通常有片头、片尾,片中的广告及片中观看者不想看或者想再看一遍的内容,而今天在跑步机这个场景中,均没有人研究如何适应跑步者的视频控制。
[0070]
下面以图6来说明在跑步机上跑步这个场景下如何控制视频,在图6中,s501视频暂停、s502视频播放、s503视频停止、s504快进/快退,它们为视频功能中最常见的几个状态,而s505至s510为触发编码,在该触发编码中采用了表1与表2组合、正交的触发编码,而s511至s516则为控制视频的执行的指令。
[0071]
s501为视频暂停状态,当视频使用者想播放视频时,触发s507即表1中编码但使用图2 中p104指令窗口的“·
s
·”,此时识别到s507触发,并且视频是在暂停状态,则执行播放的指令即s514。当s514执行后,视频功能的状态由s501改变为s502视频播放状态。当视频
在s502播放状态时,如果想切换视频,切换到下个视频,则触发s505,也就是
“→
s”方向触发,也就是触发该方向触发后s秒内无其他触发(也就是使用图2中p104类型的指令窗口),当识别到该触发后,又是在s502状态,则执行s512,切换到下个视频,当视频切换后继续s502视频播放状态。如果想切换到上个视频,则触发s506也就是
“←
s”方向触发,当识别到该触发后,又是在s502状态,则执行s513,切换到上个视频;切换后继续播放状态s502,如果此时想暂停,则触发s507,在播放状态识别到s507触发后,则执行s511暂停指令,s511执行后则视频状态调整到s501视频暂停状态。而在s502状态时,如果观看者想停止视频,则触发s508,在播放状态收到s508后即执行s515指令,停止播放,当s515执行后,视频功能的状态调整到s503视频停止。在s503停止状态时,如果视频观看者想看视频,则触发s507,则执行s514播放视频。在s502视频播放状态时,如果视频使用者想快倒回去,则触发是s509,当在播放状态与收到s509触发后,执行s516快退指令,而执行后,视频的状态就调整为s504快退状态;如果视频观看者在s502状态想快进,则触发s510指令,当根据状态与触发识别为s510时,执行s516快进指令,执行该指令后,状态调整到s504快进状态。在s504状态时,如果快进或者快退到观看者期望的视频位置时,触发s507,在执行s514,继续正常的播放,在上述实施例中,指令窗口使用了图2中p104定义的指令窗口模式,所以中间都用“s”表明,而用图2中p105模式,则不必特别标注“s”,上述实施例在描述快进快退是,仅使用了一种速度,如果是变成现在快进速度的2倍速,则可以用
“→
s
→
s
→”
或“·
s
·
s
→”
。也就是3位触发,其实该3位触发源自表1示例与表2示例组合正交的触发表,如果用图2中的p105指令窗口,则可以表述为
“→→→”
或“··
→”
,与本方法编指令时结合场景与功能的出发点一致,使用者用快快的向右或向右向右再向右来记忆倍速快进指令,与我们控制时实现功能的目标在感性上一致,所以使用者不必强记指令,而是可以根据在先指令推导出倍速快进的指令,这也是传统编码如摩尔斯或二进制所不具备的逻辑,当然上述实施例中还可以用前面指令窗口套用模式,这样
“→→”
与
“→
s
→”
就可以差分出来,比如第一个
“→→”
就是代表“快进”而
“→
s
→”
则代表倍速快进。
[0072]
上述实施例以跑步机上控制视频为例,描述了如何用可感知时长与方向性的传感器或传感器组来控制视频,在运动状态下,跑步者用方向性的触发或者长短触发的结合,可以非常容易的实现视频的控制,而既往却只能等着看广告或者等看片头片尾而无所作为。在视频的实施例中,提示信息就不是语音了而是视频的变化,而这种方向与时长的结合,可以用于智能电子设备对机电设备的控制,操作者只需要看机电设备的工作状态就好,而非必须听声音、语音、tts、震动,也就是用本方法在用户可视被控设备状态,视觉信号作为反馈。
[0073] 对应于精度比较高的可感知方向性与触发时长的传感器而言,还可以增加速度维度,见表3,对应触控场景,我们将速度定义为某个值,高于为快,低于为慢,这样便于触发控制,而不是监测连续性的速度,比如大于等于2m/s为快,而低于2m/s为慢速,则方向性触发配合对其触发速度形成触发组合编码,显然是增加了更多维度的触发编码体系, 也就是通过本方法可以规避手势雷达手势较少成本较高体积太大不能装进微小电子设备的问题,比如音量调节,在进入音量调节状态时,慢速位移触发时,音量就可以跟着位移方向来变大或者变小,而是快速触发时,则又成了切换歌曲的触发。而连续两个快速方向触发,则又成了音乐快进的触发。这个功能可以用于今天智能音响的控制,今天无论车载还是家用音响
通常是按键控制,而用了可感知外部方向性特别是非接触式触发的传感器后,利用本方法,就可以控制音响不用眼、甚至不用手指而是用手势来实现特别是在驾驶时,使用者都不必将眼睛离开路面,从而降低驾驶风险。
[0074]
方向性传感器结合速度属性后的编码触发表用快、慢与方向触发结合后,一位方向触发其实在一个状态下就变成了2个含有,比如慢向前与快向前,比如在听书app中,跳到下段就是慢向前,而跳到下个章节则是快向前,这样使用者都是用向前这个触发,但实施效果就完全不同,而今天听书app在跑步时,只能被动听而不能有丰富的被操作控制的能力。而本方法则非常好的适合上述领域的使用,使用户在非静态场景可以自在、方便的操作对应app或系统。
[0075]
速度的测量通常由开始接触时的a点到触发结束后的b点的距离除a点到b点所用时长。在表1、与表3组合、正交后,与被控目标的状态、功能结合,会非常方便的解决人们操作智能终端、或智能电子设备在今天非静态场景或准静态场景遇到的麻烦。
[0076]
本方法触发编码的灵活性与多维度与目标被控智能电子设备的功能、状态正交,通常会以1或2位的触发编码,控制足够丰富的功能。而且触发均可以在运动、驾驶等非静态状态下,而且甚至可以不用手指(非接触式传感器场景)、不用眼睛参与,所以可以使智能电子设备的可用场景大大增加。
[0077]
前面用了感知触发时长、感知触发方向、感知触发速度等的传感器来描述本方法在不同场景下不同目的的实施例,而下面以广泛使用的压力传感器来说明本方法在压力型传感器下的工作实施例。
[0078]
在登山环境下,登山者通常都会使用登山杖,用来减轻下肢的压力,登山者通常采用单杖或者双杖,所以至少有一只手被占用。在登山环境下时,登山者需要频繁使用对讲机与队友通信或看gps来确定轨迹与方位,而在险峻路段时,通常手要用来抓扶山石、树木以平稳重心。所以登山用电子设备最好不占手就能操控使用,而今天的智能电子设备如智能手机、gps以及智能对讲机等,均是用屏幕、按键控制,所以控制时需要登山者眼睛看着屏幕,用指头点按键来控制菜单以实现控制,所以在队列行进时,操控必然影响队列的行进,如果用眼睛的余光看路,则会面临风险;登山时雨、雪、雾、寒都是常见的山区气候,而雨天无论手湿还是触摸屏幕沾水,都影响操控,而天冷时则在使用电子设备时要频繁的穿、脱手套以便用手指控制电子设备。
[0079]
针对登山运动这个场景,目前并无特别的解决方法,语音识别在户外,特别在登山时,通常因为风噪而无法进行准确识别,从而不能正常的满足需求,而在登山环境下时,登山者也不能因为控制而去频繁用眼睛去寻找电子设备的各种“键”,这会导致意外,而对于道路复杂区域,则需要反复看gps上的轨迹与预设道路是否一致,这又要求登山者不得不在
行进中使用设备而用眼睛余光看路或者破坏行进队列,停下来使用电子设备。
[0080]
而本公开则可有效的解决这个问题, 首先这个场景中需要使用登山杖,而如果通过登山杖,控制智能电子设备的使用比如播报路径、海拔、温度、湿度,或者控制智能手机等的音乐、通信以及对讲机对讲等, 也就是让登山者在行进中通过触发登山杖的传感器就可以完成原来必须停止行进或放慢行进才可以做的事情。
[0081]
在登山杖智能化这个实施例子中,由于登山者在使用登山杖时握的方向与撑的力度是根据地形变化的,所以单一触发时间、触发速度与触发方向的传感器并不适用于本场景(容易被误触发)。通常对于使用登山杖的手,只有拇指与食指是方便控制的,所以在登山杖杖柄顶部,设置一凹形适合拇指触发区域或食指适合触发区域,而该凹形中区域中部署可感知触发时长与感知压力的传感器或传感器组,这样通过压力触发与时长触发来实现对智能电子设备的控制。
[0082]
我们将拇指或食指触发该压力与时长传感器或传感器组的力度分为轻和重两种力量属性,假定小于5kg为轻,而大于5kg为重,这样我们就可以利用压力传感器监测而获得轻、重两种触发属性,而不是利用压力传感器一般属性线性的去测试压力值。
[0083]
对应于触发,因为数字电路都有时钟,所以都有触发开始时间、触发结束时间,触发与触发之间的时间关系,这就是可以用表1的触发编码,而在压力传感器场景下,增加轻、重两个维度后,则形成表4。当看到表4时,已经有足够多的触发编码让我们可以完成对智能电子设备的操作与控制,其中基础触发就是轻短触发、重短触发、轻长触发、重长触发,还有轻更长时长的触发和重更长时长的触发,这样各个触发在结合形成两位触发编码,这样在最长两位触发指令时,整个编码表达到6个1位触发与16个2位触发共计22触发编码表22个触发组合,而通常的操作与控制,在状态与功能结合时,足够控制操作智能电子设备,当然也可以表1结合成轻几次触发,重几次触发,轻重结合的触发,这都是一般技术人员在此编码基础上不用创新自然可类推结果。
[0084]
在登山杖这个场景下,假如设定更长时长的重触发为菜单或者功能切换,当登山者用大于5kg的更长时长的触发时,会按照图2更长时长触发的定义播报功能,比如t>=t2时间时,开始tts海拔,而此时登山者拇指停止触发即t_end小于t3,则表明登山者想知道现在的海拔,则与登山杖无线连接的智能电子设备则会tts现在gps上的海拔高度。以此类推,通过超长重触发就可以用来选择功能或者菜单。而轻长触发可以定义为对讲键,也就是轻长触发时,可以开始对讲,而触发结束,只能收听,这样登山者不必再用一只手按对讲机的ptt(pust to talk)键,所以利用本方法可以非常容易的解决今天登山运动使用电子设备的各种不便。
[0085]
再比如登山者是用登山杖与智能手机无线连接,如果在音乐播放状态下想切换到下首歌曲,可以用轻“·”触发,而切换到上首歌曲则可以用重“·”,而暂停用轻“··”。所以根据表4及需要控制的功能,就可以定义足够丰富的触发指令,使登山者在风、雨、雪及危险路段时,控制智能电子设备如智能对讲机、智能手机等不再面临今天所遇到的困难与问题。
[0086]
压力传感器结合触发时长的触发编码表 在做上述说明时,技术人员自然会想到,既然本方法可以这样组合出触发编码,那在有3d触控能力的电容触屏上,能否用时长触发、压力型触发、方向型触发、速度型触发结合一起,形成多维度的触发控制表,然后结合被控设备的功能与状态,进行智能电子设备的操作与控制,答案当然是肯定的,如在3d电容屏时,重的方向性触发与轻方向性触发时两个指令时,如果增加速度维度,就变成了轻快,重快,轻慢,重慢,一个方向性触发出现4个编码,可以执行4个指令。所以技术人员可以以此类推出2位指令编码,加上结合时长触发,所以可以很方便的组合出非常丰富的触发表,该触发表中的组合从1位到多位触发再结合状态与功能,智能电子设备被控的功能与状态都会被满足。
[0087]
说明书中前面提及单兵作战时既能让单兵保持瞄准、射击,又可操作单兵电子设备而不是今天两者必舍弃其一,下面讲述如何用本方法实现。我们知道枪械都有扳机,扳机外围有一个环状物,术语叫trigger guard或者扳机护环,目的是不让扳机误触发,造成走火,使用枪械训练时通常有严格要求,食指在非瞄准状态不可以搭在扳机上或者伸进扳机护环内,所以持枪作战时,无论步枪还是手枪,只要是必须双手持枪(步枪)或双手持枪习惯者,两手都被占,而两手中最灵敏的指头也就是扣扳机的那个食指却是空闲的,而如果在枪械的扳机护环外则,扳机位置的前端,食指可灵活触碰的区域,安装使用了本方法的触控装置,该触控装置与单兵智能电子设备无线互联,用本方法所述的触控技术就可以轻易的控制单兵电子设备,无论是步话通信,还是数据、指令,还有单兵自身的信息汇报,通过单兵的耳机与该触控装置就可以完成。在单兵作战时,作战人员就可以两手紧握枪械(非手枪更是如此),作战与电子设备的控制两不耽误,而非今天他们通信或使用电子设备时就需要用一只手去控制单兵电子设备如步话机,在战时,作战人员就不会丢失瞬间的作战机会,因为食指始终在扳机位附近,而且又是两手持枪,所以随时可以将触控电子设备的食指移动到扳机位进行射击击发,由于是两手持枪,所以瞄准精度大大的得到保障,而现在,包括现代化最好的部队之一的美军,通信或电子操作,手都是离开枪械的。所以采用本方法所述技术后,可以有效提升单兵作战的信息化交互能力又不会如今天可能造成的其它负面影响,而且是除了射击瞬间,其它时段都可以操作智能电子设备与指挥者交互,而且还都是保持双手持枪。
[0088]
以上用多个实施例及图表来描述本方法在不同场景中的实现,而各个实施例中的场景均是今天现实中尚没有被有效解决的问题,所以本方法在不同场景下利用不同属性的传感器,均能很好的控制智能电子设备、智能终端、智能手机等,从而让各种场景中的智能电子设备的使用者更安全更自由。
[0089]
对应于盲人而言,本方法也是一个非常有效的解决方案,今天智能终端上的盲人系统如苹果,是采用的屏幕触发中多点技术,也就是通过单点击、双点击、两指触发、三指触发等等复杂指令来形成触发指令,当盲人雨天外出时,则苹果的技术在屏幕沾水时完全失效。当盲人在行进中时,用屏幕触发通常需要两只手,则导致盲人必须停下来。而使用本方法,则完全不会因为雨天,或者行进影响对电子设备的使用。
[0090]
对于本方法而言,传感器可以是分体,也可以是在智能电子设备上,对于分体设备可以采用有线、无线等形式与被控目标智能电子设备互联,通过分体式传感器或传感器的电子设备来控制与之相联的智能电子设备。
[0091]
本方法也可以用于在驾驶、运动、走路时即时消息的读取与收发,比如在一个聊天群中,假设定义“·”为读下条信息,而
“-”
为读上条信息(文字信息可以被tts,语音信息直接播放,图片信息可以被后台ai成文字描述后,然后再用tts读取),而超长覆盖则是留言,在这个例子中如图2,t2要大于长触发的结束时长,这样才不会产生触发干扰,超长触发大于t2时就可以在提示下说话留言了,而离开本群,则触发
“--”
,而在聊天群组列表中,通常是以收到消息时间排序,也就是退出后在列表的第一位,如果想与别的群聊天,触发“·”为下个群,而
“-”
为上个群,进入群则用“··”,而指针指到某个群时,就会tts出该群的名称,比如语音读出“高中同学群”,而这个触发组合用今天的智能手机上的接近距离传感器就可以实现,而太多的低头族在本方法下就可以被解放。所以本方法可以在多种场景下让智能电子设备的使用者更安全、更自由。
[0092]
本方法可以使用的场景及可以控制的功能都很丰富,可以应用到任何cpu控制的电子设备、cpu控制的机械设备、可穿戴设备及智能电子设备中,在人们运动、驾驶以及其他眼、手不便的场合方便操控功能相对多或者复杂的智能电子设备、app甚至即时消息app等。由于本方法的触发是利用了传感器的方向、速度、压力、触发时长,所以是多维度触发,其中表1至表4只是对最简单的情况做了触发编码列表,而不代表所有用本方法的触发编码,由于触发编码又与所控app或智能电子设备的状态、功能正交,所以是多维度的触发指令体系,而表1至表4只能列举本方法下的基础触发编码,而更复杂的基于这些基础触发形成的复杂触发编码不过是本方法下的具体实施例,也只是本方法的一种实现而已。
[0093]
本发明是一种操作控制智能终端或智能电子设备的方法,利用传感器或传感器组,在短、长、更长时长形成的触发编码表基础之上,结合传感器或传感器组的方向性触发或压力型触发或方向型与速度型触发或方向性触发与速度型和压力型触发,形成2至多维的触发编码表,编码与被控智能电子设备或app的功能、状态结合形成触发指令,在对应的功能与状态下,通过触发传感器,从而实现对智能电子设备的操、控,使用者一般通过可感知的提示信息如语音、声音、tts、震动及可视信息进行指令触发。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1