电动汽车CAN总线控制方法及系统与流程
电动汽车can总线控制方法及系统
技术领域
1.本发明涉及汽车技术领域,特别是涉及一种电动汽车can总线控制方法及系统。
背景技术:
2.随着汽车工业的飞速发展和人们生活条件的不断改善,汽车已经成为人们出行不可或缺的交通工具之一。汽车保有量逐年增加,越来越多的人拥有了私家车。而电动汽车是目前汽车行业发展的方向。
3.汽车电动化、智能化、互联化是当今汽车发展的主要趋势,已助推各大汽车主机厂对电动汽车加大研究。电动车的技术与策略逐渐成熟,实现功能也由基本功能向复杂功能推进,电动汽车中can总线分布也由原来较简单的结构发展到更为复杂的结构,现有技术中,can总线的休眠唤醒逻辑设计不够合理,整车休眠后,仍存在耗电较多的问题,若车辆长时间不开,容易出现亏电而导致无法正常启动车辆。
技术实现要素:
4.针对上述问题,本发明的一个目的在于提出一种电动汽车can总线控制方法,以解决现有技术中can总线的休眠唤醒逻辑设计不够合理的问题。
5.一种电动汽车can总线控制方法,所述can总线为四网段式拓扑结构,所述can总线包括动力p
‑
can、底盘c
‑
can、车身b
‑
can、远程t
‑
can,每个网段都有自身的控制器,所述方法包括:
6.当整车处于cg off时,动力p
‑
can和底盘c
‑
can的网段控制器同步立即进入休眠状态;
7.车身b
‑
can在预设时间内、满足osek网络管理休眠条件下,车身b
‑
can的网段控制器进入休眠状态;
8.车身b
‑
can的网段控制器进入休眠状态后,远程t
‑
can在满足osek网络管理休眠条件下,远程t
‑
can的网段控制器进入休眠状态,最终动力p
‑
can、底盘c
‑
can、车身b
‑
can、远程t
‑
can的网段控制器均进入休眠状态,实现整车休眠。
9.根据本发明提供的电动汽车can总线控制方法,当整车处于cg off时,动力p
‑
can和底盘c
‑
can的网段控制器先进入休眠状态,车身b
‑
can在预设时间内、满足osek网络管理休眠条件下,车身b
‑
can的网段控制器再进入休眠状态,最后,远程t
‑
can在满足osek网络管理休眠条件下,远程t
‑
can的网段控制器进入休眠状态,最终动力p
‑
can、底盘c
‑
can、车身b
‑
can、远程t
‑
can的网段控制器均进入休眠状态,实现整车休眠,can总线的休眠唤醒逻辑设计更加合理,车辆被唤醒就可以工作,车辆休眠可以有效节省电量,长时间待机,实测表明待机40天,仍可实现车辆的正常启动。
10.另外,根据本发明上述的电动汽车can总线控制方法,还可以具有如下附加的技术特征:
11.进一步地,所述方法还包括:
12.当整车处于cg on时,动力p
‑
can、底盘c
‑
can、车身b
‑
can、远程t
‑
can的网段控制器均被唤醒,整车正常工作。
13.进一步地,所述方法还包括:
14.在整车完成休眠后,当通过t
‑
box后台或者移动终端下发命令,进行远程车辆操作时,远程t
‑
can先被osek网络管理唤醒,远程t
‑
can的网段控制器被唤醒;
15.远程t
‑
can的网段控制器被唤醒后,车身b
‑
can被osek网络管理唤醒,车身b
‑
can的网段控制器被唤醒;
16.车身b
‑
can的网段控制器被唤醒后,车身b
‑
can上的控制器bcm执行t
‑
box后台或者移动终端下发的命令,且当整车处于cg off时,整车再次休眠。
17.进一步地,所述方法还包括:
18.在整车完成休眠后,当通过遥控钥匙操作车辆时,车身b
‑
can先被osek网络管理唤醒,车身b
‑
can的网段控制器被唤醒;
19.车身b
‑
can的网段控制器被唤醒后,远程t
‑
can被osek网络管理唤醒,远程t
‑
can的网段控制器被唤醒;
20.远程t
‑
can的网段控制器被唤醒后,远程t
‑
can上的控制器t
‑
box向t
‑
box后台或者移动终端上传车辆状态信息,且当整车处于cg off时,整车再次休眠。
21.进一步地,所述预设时间为5~10秒。
22.本发明的另一个目的在于提出一种电动汽车can总线控制系统,以解决现有技术中can总线的休眠唤醒逻辑设计不够合理的问题。
23.一种电动汽车can总线控制系统,所述can总线为四网段式拓扑结构,所述can总线包括动力p
‑
can、底盘c
‑
can、车身b
‑
can、远程t
‑
can,每个网段都有自身的控制器:
24.当整车处于cg off时,动力p
‑
can和底盘c
‑
can的网段控制器同步立即进入休眠状态;
25.车身b
‑
can在预设时间内、满足osek网络管理休眠条件下,车身b
‑
can的网段控制器进入休眠状态;
26.车身b
‑
can的网段控制器进入休眠状态后,远程t
‑
can在满足osek网络管理休眠条件下,远程t
‑
can的网段控制器进入休眠状态,最终动力p
‑
can、底盘c
‑
can、车身b
‑
can、远程t
‑
can的网段控制器均进入休眠状态,实现整车休眠。
27.根据本发明提供的电动汽车can总线控制系统,当整车处于cg off时,动力p
‑
can和底盘c
‑
can的网段控制器先进入休眠状态,车身b
‑
can在预设时间内、满足osek网络管理休眠条件下,车身b
‑
can的网段控制器再进入休眠状态,最后,远程t
‑
can在满足osek网络管理休眠条件下,远程t
‑
can的网段控制器进入休眠状态,最终动力p
‑
can、底盘c
‑
can、车身b
‑
can、远程t
‑
can的网段控制器均进入休眠状态,实现整车休眠,can总线的休眠唤醒逻辑设计更加合理,车辆被唤醒就可以工作,车辆休眠可以有效节省电量,长时间待机,实测表明待机40天,仍可实现车辆的正常启动。
28.另外,根据本发明上述的电动汽车can总线控制系统,还可以具有如下附加的技术特征:
29.进一步地,当整车处于cg on时,动力p
‑
can、底盘c
‑
can、车身b
‑
can、远程t
‑
can的网段控制器均被唤醒,整车正常工作。
30.进一步地,在整车完成休眠后,当通过t
‑
box后台或者移动终端下发命令,进行远程车辆操作时,远程t
‑
can先被osek网络管理唤醒,远程t
‑
can的网段控制器被唤醒;
31.远程t
‑
can的网段控制器被唤醒后,车身b
‑
can被osek网络管理唤醒,车身b
‑
can的网段控制器被唤醒;
32.车身b
‑
can的网段控制器被唤醒后,车身b
‑
can上的控制器bcm执行t
‑
box后台或者移动终端下发的命令,且当整车处于cg off时,整车再次休眠。
33.进一步地,在整车完成休眠后,当通过遥控钥匙操作车辆时,车身b
‑
can先被osek网络管理唤醒,车身b
‑
can的网段控制器被唤醒;
34.车身b
‑
can的网段控制器被唤醒后,远程t
‑
can被osek网络管理唤醒,远程t
‑
can的网段控制器被唤醒;
35.远程t
‑
can的网段控制器被唤醒后,远程t
‑
can上的控制器t
‑
box向t
‑
box后台或者移动终端上传车辆状态信息,且当整车处于cg off时,整车再次休眠。
36.进一步地,所述预设时间为5~10秒。
附图说明
37.本发明实施例的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
38.图1是根据本发明一实施例的电动汽车can总线控制方法的流程图;
39.图2是根据本发明另一实施例的电动汽车can总线控制方法的流程图;
40.图3是根据本发明又一实施例的电动汽车can总线控制方法的流程图。
具体实施方式
41.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
42.请参阅图1,本发明一实施例提出的电动汽车can总线控制方法,所述can总线为四网段式拓扑结构,所述can总线包括动力p
‑
can、底盘c
‑
can、车身b
‑
can、远程t
‑
can,每个网段都有自身的控制器,如底盘c
‑
can有刹车防抱死系统abs、车身b
‑
can有车身控制器bcm、仪表等,所述方法包括步骤s101~s105:
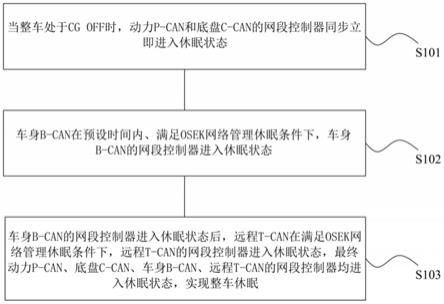
43.s101,当整车处于cg off时,动力p
‑
can和底盘c
‑
can的网段控制器同步立即进入休眠状态。
44.s102,车身b
‑
can在预设时间内、满足osek网络管理休眠条件下,车身b
‑
can的网段控制器进入休眠状态。
45.其中,所述预设时间例如为5~10秒。
46.s103,车身b
‑
can的网段控制器进入休眠状态后,远程t
‑
can在满足osek网络管理休眠条件下,远程t
‑
can的网段控制器进入休眠状态,最终动力p
‑
can、底盘c
‑
can、车身b
‑
can、远程t
‑
can的网段控制器均进入休眠状态,实现整车休眠。
47.其中,整车钥匙下电(cg off),动力p
‑
can和底盘c
‑
can网段控制器同步立即休眠。
车身b
‑
can在5到10秒内可以满足osek网络管理休眠条件,进而进入休眠。车身b
‑
can一旦进入休眠后,远程t
‑
can则将满足osek网络管理休眠条件,进而进入休眠。至此整车所有模块进入休眠状态,整车进入静默待机状态,实测表明可待机40天。
48.具体的,所述方法还包括:
49.当整车处于cg on时,动力p
‑
can、底盘c
‑
can、车身b
‑
can、远程t
‑
can的网段控制器均被唤醒,整车正常工作。也即,在整车拧钥匙上电或者充电后(cg on),动力p
‑
can、底盘c
‑
can、车身b
‑
can、远程t
‑
can各网段均被唤醒,也就是各网段控制器模块被唤醒,整车正常工作。
50.具体的,请参阅图2,所述方法还包括步骤s201~s203:
51.s201,在整车完成休眠后,当通过t
‑
box后台或者移动终端下发命令(如远程寻车(解闭锁、鸣笛)、车辆定位等),进行远程车辆操作时,远程t
‑
can先被osek网络管理唤醒,远程t
‑
can的网段控制器被唤醒;
52.s202,远程t
‑
can的网段控制器被唤醒后,车身b
‑
can被osek网络管理唤醒,车身b
‑
can的网段控制器被唤醒;
53.s203,车身b
‑
can的网段控制器被唤醒后,车身b
‑
can上的控制器bcm执行t
‑
box后台或者移动终端下发的命令,且当整车处于cg off时,整车再次休眠。
54.在整车完成休眠后,可以通过t
‑
box后台或者手机app下发命令,进行远程寻车(解闭锁、鸣笛)、车辆定位等,此时远程t
‑
can将首先被唤醒,而后车身b
‑
can进一步被唤醒,最后由车身控制器bcm负责执行车辆解闭锁、鸣笛等。当执行完寻车后,车辆逻辑将执行的休眠策略,进而整车再次进入休眠待机状态。
55.具体的,请参阅图3,所述方法还包括步骤s301~s303:
56.s301,在整车完成休眠后,当通过遥控钥匙操作车辆(例如遥控钥匙解闭锁、开门、寻车等)时,车身b
‑
can先被osek网络管理唤醒,车身b
‑
can的网段控制器被唤醒;
57.s302,车身b
‑
can的网段控制器被唤醒后,远程t
‑
can被osek网络管理唤醒,远程t
‑
can的网段控制器被唤醒;
58.s303,远程t
‑
can的网段控制器被唤醒后,远程t
‑
can上的控制器t
‑
box向t
‑
box后台或者移动终端上传车辆状态信息,且当整车处于cg off时,整车再次休眠。
59.其中,在整车完成休眠后,当使用遥控钥匙解闭锁、开门、寻车等,此时车身b
‑
can将首先被唤醒,而后远程t
‑
can再进一步被唤醒,最后由远程t
‑
can上的控制器模块t
‑
box完成“门开状态”、定位信息给后台或者手机app。当执行完任务后,车辆没有启动,关闭车门,车辆逻辑将同样执行休眠策略,进而整车再次进入休眠待机状态。
60.根据上述的电动汽车can总线控制方法,当整车处于cg off时,动力p
‑
can和底盘c
‑
can的网段控制器先进入休眠状态,车身b
‑
can在预设时间内、满足osek网络管理休眠条件下,车身b
‑
can的网段控制器再进入休眠状态,最后,远程t
‑
can在满足osek网络管理休眠条件下,远程t
‑
can的网段控制器进入休眠状态,最终动力p
‑
can、底盘c
‑
can、车身b
‑
can、远程t
‑
can的网段控制器均进入休眠状态,实现整车休眠,can总线的休眠唤醒逻辑设计更加合理,车辆被唤醒就可以工作,车辆休眠可以有效节省电量,长时间待机,实测表明待机40天,仍可实现车辆的正常启动。
61.此外,能够根据各个应用场景,协调整车各控制器模块休眠与唤醒,提升智能化程
度。
62.基于同一发明构思,本发明一实施例提出一种电动汽车can总线控制系统,所述can总线为四网段式拓扑结构,所述can总线包括动力p
‑
can、底盘c
‑
can、车身b
‑
can、远程t
‑
can,每个网段都有自身的控制器:
63.当整车处于cg off时,动力p
‑
can和底盘c
‑
can的网段控制器同步立即进入休眠状态;
64.车身b
‑
can在预设时间内、满足osek网络管理休眠条件下,车身b
‑
can的网段控制器进入休眠状态;
65.车身b
‑
can的网段控制器进入休眠状态后,远程t
‑
can在满足osek网络管理休眠条件下,远程t
‑
can的网段控制器进入休眠状态,最终动力p
‑
can、底盘c
‑
can、车身b
‑
can、远程t
‑
can的网段控制器均进入休眠状态,实现整车休眠。
66.本实施例中,当整车处于cg on时,动力p
‑
can、底盘c
‑
can、车身b
‑
can、远程t
‑
can的网段控制器均被唤醒,整车正常工作。
67.本实施例中,在整车完成休眠后,当通过t
‑
box后台或者移动终端下发命令,进行远程车辆操作时,远程t
‑
can先被osek网络管理唤醒,远程t
‑
can的网段控制器被唤醒;
68.远程t
‑
can的网段控制器被唤醒后,车身b
‑
can被osek网络管理唤醒,车身b
‑
can的网段控制器被唤醒;
69.车身b
‑
can的网段控制器被唤醒后,车身b
‑
can上的控制器bcm执行t
‑
box后台或者移动终端下发的命令,且当整车处于cg off时,整车再次休眠。
70.本实施例中,在整车完成休眠后,当通过遥控钥匙操作车辆时,车身b
‑
can先被osek网络管理唤醒,车身b
‑
can的网段控制器被唤醒;
71.车身b
‑
can的网段控制器被唤醒后,远程t
‑
can被osek网络管理唤醒,远程t
‑
can的网段控制器被唤醒;
72.远程t
‑
can的网段控制器被唤醒后,远程t
‑
can上的控制器t
‑
box向t
‑
box后台或者移动终端上传车辆状态信息,且当整车处于cg off时,整车再次休眠。
73.本实施例中,所述预设时间为5~10秒。
74.根据本实施例提供的电动汽车can总线控制系统,当整车处于cg off时,动力p
‑
can和底盘c
‑
can的网段控制器先进入休眠状态,车身b
‑
can在预设时间内、满足osek网络管理休眠条件下,车身b
‑
can的网段控制器再进入休眠状态,最后,远程t
‑
can在满足osek网络管理休眠条件下,远程t
‑
can的网段控制器进入休眠状态,最终动力p
‑
can、底盘c
‑
can、车身b
‑
can、远程t
‑
can的网段控制器均进入休眠状态,实现整车休眠,can总线的休眠唤醒逻辑设计更加合理,车辆被唤醒就可以工作,车辆休眠可以有效节省电量,长时间待机,实测表明待机40天,仍可实现车辆的正常启动。
75.此外,能够根据各个应用场景,协调整车各控制器模块休眠与唤醒,提升智能化程度。
76.应当理解,本发明的各部分可以用硬件、软件、固件或它们的组合来实现。在上述实施方式中,多个步骤或方法可以用存储在存储器中且由合适的指令执行系统执行的软件或固件来实现。例如,如果用硬件来实现,和在另一实施方式中一样,可用本领域公知的下列技术中的任一项或他们的组合来实现:具体用于对数据信号实现逻辑功能的逻辑门电路
的离散逻辑电路,具有合适的组合逻辑门电路的专用集成电路,可编程门阵列(pga),现场可编程门阵列(fpga)等。
77.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
78.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1