一种可实现非致命拒止的智能跟踪预警系统及方法与流程
1.本发明涉及智能跟踪拒止技术领域,特别是涉及一种可实现非致命拒止的智能跟踪预警系统及方法。
背景技术:
2.在一些需要重点监控的区域,如机场、监狱、铁路沿线等地,为了防止无关人员的滞留、入侵和各种破坏活动,在这些地方的部分区域会设置禁区,传统的安防系统可以对进入禁区的可疑目标进行跟踪拍照和摄像,发现目标并发出报警声音,以告知值班人员相关禁区有入侵行为,之后相应管理部门依据传回的视频信号做出判断,并立即组织人力到现场进行警告和驱散,但是存在一定的滞后性,在一些敏感的区域可能会延误导致错过最佳行动时机,造成一定的损失。
技术实现要素:
3.针对上述问题,本发明提供了一种可实现非致命拒止的智能跟踪预警系统,同时还提供了一种应用于该系统的智能跟踪预警方法,该系统结合了定向声效能设备、激光眩目设备、补光灯设备、预警摄像机、跟踪摄像机等多种设备,在视频智能识别和跟踪的基础上,对声/光等多种功能的拒止设备进行系统集成,具有高度的智能化、系统化和集成化,在应用领域内将很好地发挥防范、预警、拒止的功能,可有效保障社会资源、财产、人身安全。
4.本发明的技术方案如下:
5.一种可实现非致命拒止的智能跟踪预警系统,包括安装支架和云台,所述云台包括固定部和可相对固定部进行横向360
°
及俯仰180
°
运动的活动部,所述云台的固定部可拆卸的设于安装支架上,所述云台的活动部上设有跟踪组件和至少一个拒止组件,所述活动部为1个或多个,所述跟踪组件和至少一个拒止组件设于同一个活动部上或分别设于一个活动部上,所述跟踪组件和其中至少一个拒止组件同步运动,所述云台的固定部的底部设有预警识别组件;所述安装支架上还设有综合控制机箱,该综合控制机箱由机箱壳体以及安装在机箱壳体内的主控模块、综合控制板、图像跟踪模块、电源板、伺服驱动器、声效能控制模块、接插件、除湿装置和风扇等组件构成。
6.在进一步的技术方案中,所述拒止组件为激光眩目器、定向声效能设备、抓捕网、非致命微型导弹、催泪弹、橡皮弹、巡回弹和无人机干扰器中的一种或多种,其中,激光眩目器采用可变焦光学系统,可相对云台的固定部进行俯仰动作,实现对锁定目标的打击功能,激光眩目器的电源供电通过云台内部的导电滑环,由外部电源进行供电,激光眩目器的启动接口由云台的辅助开关接口进行控制,定向声效能设备为定向声波器,定向声波器的声波出口对准强声出口,采用独特双dsp信号处理技术,提供声压强度,具有强指向性、高聚能、作用距离远的特点,定向声波器的电源供电通过云台内部的导电滑环,由外部电源进行供电,并且定向声波器的启动接口由跟踪摄像机的接口进行控制,所述云台的活动部的顶部设有顶部护罩,所述定向声效能设备设于顶部护罩内,所述顶部护罩上设有强声出口;所
述激光眩目器设于云台的活动部上。
7.在进一步的技术方案中,所述预警识别组件为视频识别组件、毫米波雷达识别组件、红外热成像识别组件、激光雷达识别组件和被动红外感应识别组件中的一种或几种。
8.在进一步的技术方案中,所述云台的活动部通过横向轴系及俯仰轴系与固定部活动连接,所述云台的固定部上设有分别驱动横向轴系和俯仰轴系的驱动组件,该驱动组件可以为伺服电机、步进电机或驱动气缸等。
9.在进一步的技术方案中,所述跟踪组件为跟踪摄像机,所述跟踪摄像机设于第一防护罩内,所述第一防护罩上位于跟踪摄像机的上方设有跟踪摄像机遮阳罩。
10.在进一步的技术方案中,所述预警识别组件为预警摄像机组,所述预警摄像机组包括竖直向下设置的垂直预警摄像机和围绕该垂直预警摄像机的多个水平设置的水平预警摄像机,预警摄像机的焦距根据实际应用场景采用不同焦距的定焦镜头,多个预警摄像机输出的网线,直连到整机接线盒,预警摄像机的供电采用云台外部供电电源。
11.在进一步的技术方案中,所述水平预警摄像机的顶部设有水平预警摄像机遮阳罩。
12.在进一步的技术方案中,所述强声出口为由若干个边长为4毫米的矩形孔组成的网格结构;所述强声出口上设有激光窗口片,所述激光窗口片为镀膜石英玻璃。
13.在进一步的技术方案中,所述云台的固定部的底部一侧开设有出线孔,所述云台的固定部上对应出线孔处设有整机接线盒,云台上各组件的接线由整机接线盒延伸至安装之间与外部连接,其中,整机接线盒由外壳、交换机模组、电源转换模块、i/o接口转换模块灯组成,电源转换模块主要用来将外部电源电压转换为预警摄像机、交换机灯模组所适配的电压,交换机模组主要实现预警摄像机、跟踪摄像机的视频网络的汇聚,以及外部网线的连接。
14.本发明属于一种可对禁区内人员进行检测跟踪、预警、警示及拒止的系统,该系统首先通过低照度预警摄像机的图像编码处理模块,对预警摄像机获取的实时视频进行预处理,可以在浏览器或者操作平台上看到视频画面,然后经过人员检测算法对人员进行检测,经过视频坐标与实际坐标的比对,通过算法分析并对超过设定阈值的人员目标进行跟踪,跟踪指令通过串口协议发送至云台,云台带动跟踪摄像机和拒止设备实时转动至目标区域,并实时回传云台当前位置,预警摄像机实时进行位置修正,以达到最优跟踪效果,管理人员通过跟踪摄像机跟踪实际,人工触发辅助设备,对越界人员进行拒止打击,本系统可以搭载多个预警摄像机,多个预警摄像机均可对云台进行控制。
15.本发明是一种集视频采集、目标侦测、报警、追踪、警示、拒止处置等功能为一体的智能系统,该系统对进入危害警戒区域内的人能够有效识别、报警、跟踪与警告,当警告无效时,可以启动定向声效能设备和强激光眩晕进行拒止,该系统可提高禁区内人员跟踪的准确性,降低管理人员巡查的工作量,适用于无人值守场所、铁路沿线等场景。
16.本发明还提供了一种应用于上述系统的智能跟踪预警方法,其技术方案如下:
17.一种可实现非致命拒止的智能跟踪预警方法,首先对预先划定的禁区范围处的物体进行识别和跟踪,当识别到有物体进入禁区范围内后,发出预警,当预警无效时,启动拒止组件对进入禁区范围内的物体进行非致命拒止打击。
18.当进入禁区范围的物体为人体时,该方法具体包括以下步骤:
19.s11、通过对视频画面内的禁区范围,进行标定,划定人员禁止进入的禁区范围;
20.s12、预警识别组件对识别内容进行结构化分析及编码处理;
21.s13、对处理资料中的活动目标的大小、运动速度以及运动趋势进行识别,并进行数据结构化;
22.s14、若人体目标只有一个时,直接采用跟踪摄像机对人体目标进行跟踪,若人体目标数量在两个及两个以上时,依次对人体进行标号,分别跟踪;
23.s15、采用参考模板法、人脸规则法以及肤色模型法来识别出不同标号人物的人体面貌特征;
24.s16、通过人体算法处理,依次将不同标号的人体进行区分,并对能够监控到的人体进行跟踪处理,若单一预警识别组件采集到多个人体时,则以第一个检测到的为高优先级;
25.s17、将人体标号目标的动作与划定的禁区范围进行对比,若该目标的动作已涉入禁区时,则直接对安保人员进行连接警示,或直接进行报警处理;
26.s18、当多个预警识别组件发现人员目标时,等待第一个预警事件完成跟踪后,云台响应第二个预警识别组件的触发并进行跟踪,对后续预警事件处理,以此类推;
27.s19、针对出现的涉入禁区人员,进行声光报警,对不听劝阻者,进行拒止设备的远程控制,对涉入禁区人员进行非致命拒止打击。
28.当进入禁区范围的物体为机械物体时,该方法具体包括以下步骤:
29.s21、通过对视频画面内的禁区范围,进行标定,划定禁止进入的禁区范围;
30.s22、预警识别组件对识别内容进行结构化分析及编码处理;
31.s23、对处理资料中的活动目标的大小、运动速度以及运动趋势进行识别,并进行数据结构化;
32.s24、若物体目标只有一个时,直接采用跟踪摄像机对机械物体目标进行跟踪,若机械物体目标数量在两个及两个以上时,依次对机械物体进行标号,分别跟踪;
33.s25、采用参考模板法、外部模型法来识别出不同标号机械物体的外部特征;
34.s26、依次将不同标号的机械物体进行区分,并对能够监控到的机械物体进行跟踪处理,若单一预警识别组件内采集到多个机械物体时,则以第一个检测到的为高优先级;
35.s27、将机械物体标号目标的动作与划定的禁区范围进行对比,若该目标的动作已涉入禁区时,则直接对安保人员进行连接警示,或直接进行报警处理;
36.s28、当多个预警识别组件发现机械物体目标时,等待第一个预警事件完成跟踪后,云台响应第二个预警识别组件的触发并进行跟踪,对后续预警事件处理,以此类推;
37.s29、针对涉入禁区机械物体,进行声光报警,对不听劝阻者,进行拒止设备的远程控制,对涉入禁区机械物体进行非致命拒止打击。
38.本发明的有益效果是:
39.本发明是一种集视频采集、目标侦测、报警、追踪、警示、拒止处置等功能为一体的智能系统,该系统对进入危害警戒区域内的人能够有效识别、报警、跟踪与警告,当警告无效时,可以启动定向声效能设备和强激光眩晕进行拒止,该系统可提高禁区内人员跟踪的准确性,降低管理人员巡查的工作量,适用于无人值守场所、铁路沿线等场景。
附图说明
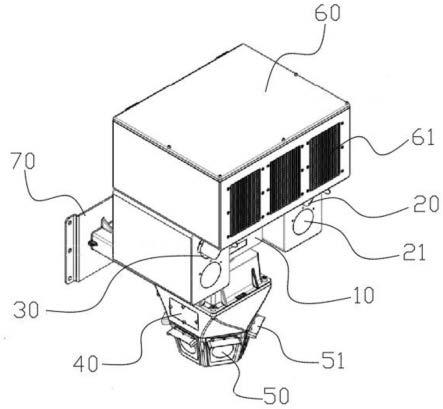
40.图1是本发明实施例所述可实现非致命拒止的智能跟踪预警系统的结构示意图。
41.附图标记说明:
42.10、云台;20、激光眩目器;21、补光灯;30、跟踪摄像机;40、整机接线盒;50、水平预警摄像机;51、水平预警摄像机遮阳罩;60、顶部护罩;61、强声出口;70、安装支架。
具体实施方式
43.下面结合附图对本发明的实施例作进一步说明。
44.实施例1:
45.如图1所示,一种可实现非致命拒止的智能跟踪预警系统,包括安装支架70和云台10,整体采用合金钢材质,云台10包括固定部和可相对固定部进行横向及俯仰运动的活动部,云台10的固定部可拆卸的设于安装支架70上,云台10的活动部上设有跟踪摄像机30和激光眩目器20,云台10的活动部的顶部设有顶部护罩60,顶部护罩60内设有定向声效能设备,顶部护罩60上设有强声出口61,所述活动部为1个或多个,所述跟踪摄像机30、激光眩目器20和定向声效能设备设于同一个活动部上或分别设于一个活动部上,使得跟踪摄像机30、激光眩目器20和定向声效能设备可进行同位联动或分体动作,利于调整出更优的拒止环境,此外,多个活动部上可分别设置一组拒止设备,能够同时对多个目标进行拒止,所述安装支架70的底部设有预警摄像机组;安装支架70上还设有综合控制机箱,该综合控制机箱由机箱壳体以及安装在机箱壳体内的主控模块、综合控制板、图像跟踪模块、电源板、伺服驱动器、声效能控制模块、接插件、除湿装置和风扇等组件构成。
46.在本实施例中,激光眩目器20采用可变焦光学系统,可相对云台10的固定部进行俯仰动作,实现对锁定目标的打击功能,激光眩目器20的电源供电通过云台10内部的导电滑环,由外部电源进行供电,激光眩目器20的启动接口由云台10的辅助开关接口进行控制。
47.在本实施例中,定向声效能设备为定向声波器,定向声波器的声波出口对准强声出口61,采用独特双dsp信号处理技术,提供声压强度,具有强指向性、高聚能、作用距离远的特点,定向声波器的电源供电通过云台10内部的导电滑环,由外部电源进行供电,并且定向声波器的启动接口由跟踪摄像机30的接口进行控制。
48.在本实施例中,如图1所示,云台10的固定部的底部一侧开设有出线孔,云台10的固定部上对应出线孔处设有整机接线盒40,云台10上各组件的接线由整机接线盒40延伸至安装之间与外部连接,其中,整机接线盒40由外壳、交换机模组、电源转换模块、i/o接口转换模块灯组成,电源转换模块主要用来将外部电源电压转换为预警摄像机、交换机灯模组所适配的电压,交换机模组主要实现预警摄像机、跟踪摄像机30的视频网络的汇聚,以及外部网线的连接。
49.在另外一个实施例中,云台10的活动部通过横向轴系及俯仰轴系与固定部活动连接,云台10的固定部上设有分别驱动横向轴系和俯仰轴系的伺服电机。
50.在另外一个实施例中,如图1所示,跟踪摄像机30和激光眩目器20分别设于第一防护罩和第二防护罩内,第二防护罩上位于激光眩目器20的下方设有补光灯21,第一防护罩上位于跟踪摄像机30的上方设有跟踪摄像机30遮阳罩。
51.在另外一个实施例中,如图1所示,预警摄像机组包括竖直向下设置的垂直预警摄
像机和围绕该垂直预警摄像机的多个水平设置的水平预警摄像机50,预警摄像机的焦距根据实际应用场景采用不同焦距的定焦镜头,多个预警摄像机输出的网线,直连到整机接线盒40,预警摄像机的供电采用云台10外部供电电源。
52.在本实施例中,如图1所示,水平预警摄像机50的顶部设有水平预警摄像机遮阳罩51。
53.在另外一个实施例中,如图1所示,强声出口61为由若干个边长为4毫米的矩形孔组成的网格结构;强声出口61上设有激光窗口片,激光窗口片为镀膜石英玻璃。
54.本发明属于一种可对禁区内人员进行检测跟踪、预警、警示及拒止的系统,该系统首先通过低照度预警摄像机的图像编码处理模块,对预警摄像机获取的实时视频进行预处理,可以在浏览器或者操作平台上看到视频画面,然后经过人员检测算法对人员进行检测,经过视频坐标与实际坐标的比对,通过算法分析并对超过设定阈值的人员目标进行跟踪,跟踪指令通过串口协议发送至云台,云台带动跟踪摄像机和拒止设备实时转动至目标区域,并实时回传云台当前位置,预警摄像机实时进行位置修正,以达到最优跟踪效果,管理人员通过跟踪摄像机跟踪实际,人工触发辅助设备,对越界人员进行拒止打击,本系统可以搭载多个预警摄像机,多个预警摄像机均可对云台进行控制。
55.本发明是一种集视频采集、目标侦测、报警、追踪、警示、拒止处置等功能为一体的智能系统,该系统对进入危害警戒区域内的人能够有效识别、报警、跟踪与警告,当警告无效时,可以启动定向声效能设备和强激光眩晕进行拒止,该系统可提高禁区内人员跟踪的准确性,降低管理人员巡查的工作量,适用于无人值守场所、铁路沿线等场景。
56.实施例2:
57.一种针对人体的可实现非致命拒止的智能跟踪预警方法,包括以下步骤:
58.s11、预警机视频处理:预警摄像机组对预警视频的内容进行结构化分析及编码处理;
59.s12、人体对象识别:对视频图像中的活动目标的大小、运动速度以及运动趋势进行识别,并进行数据结构化;
60.s13、标记处理:若人体目标只有一个时,直接采用跟踪摄像机对人体目标进行跟踪,若人体目标数量在两个及两个以上时,依次对人体进行标号,分别跟踪;
61.s14、人体特征处理:采用参考模板法、人脸规则法以及肤色模型法来识别出不同标号人物的人体面貌特征;
62.s15、禁区范围划定:通过对视频画面内的禁区范围,进行标定,划定人员禁止进入的禁区范围;
63.s16、人体运动跟踪:通过人体算法处理,依次将不同标号的人体进行区分,并对能够监控到的人体进行跟踪处理,若单一预警摄像机内采集到多个人体时,则以第一个检测到的为高优先级;
64.s17、安全预警分析:将人体标号目标的动作与划定的禁区范围进行对比,若该目标的动作已涉入禁区时,则直接对安保人员进行连接警示,或直接进行报警处理;
65.s18、多预警处理:当多个预警摄像机发现人员目标时,等待第一个预警事件完成跟踪后,云台响应第二个预警摄像机的触发并进行跟踪,对后续预警事件处理,以此类推;
66.s19、拒止设备控制:针对视频画面中出现的涉入禁区人员,进行声光报警,对不听
劝阻者,管理员可以在后台进行拒止设备(定向声效能设备和激光眩目器20)的远程控制,对涉入禁区人员进行非致命拒止打击。
67.在本发明中,拒止方式主要为激光眩目和定向声效能打击,不会造成致命性伤害,可有效规避纠纷。
68.本发明通过分析各非致命武器的作用效能和应用方式,系统性提出多非致命武器的联合战术使用方式,相比于单一非致命武器和独立分散的各种非致命武器,本发明的系统可由远及近构建多层次、多手段的防护圈,极大地提高多非致命武器的综合拒止效能。
69.本发明实现视频智能分析与多种非致命拒止设备和多传感器的融合控制,相比于传统独立分散的操控方式,本发明提供了统一的显示页面,兼容多种主流浏览器,对操控按钮进行了人性化改造提升,可极大提高综合处置效率。
70.视频显示界面可实时显示目标设备全彩/红外图像、目标参数、拒止设备工作状态等信息,界面操作按钮还可以控制设备运转,并提供激光眩目器功率、发散角度调节,也提供定向声效能设备功率、音源选择的功能。
71.本发明集成了视频智能分析与预警、激光眩目、定向声效能多技术联合拒止与打击,具有跟踪、警告、拒止等多功能,并采用高精度伺服云台进行目标跟踪,具备对运动目标昼夜全天候自动跟踪锁定与连续打击的能力,是一款多功能、多手段、多层次的非致命拒止系统。
72.实施例3:
73.一种针对机械物体的可实现非致命拒止的智能跟踪预警方法,包括以下步骤:
74.s21、通过对视频画面内的禁区范围,进行标定,划定禁止进入的禁区范围;
75.s22、预警识别组件对识别内容进行结构化分析及编码处理;
76.s23、对处理资料中的活动目标的大小、运动速度以及运动趋势进行识别,并进行数据结构化;
77.s24、若物体目标只有一个时,直接采用跟踪摄像机对机械物体目标进行跟踪,若机械物体目标数量在两个及两个以上时,依次对机械物体进行标号,分别跟踪;
78.s25、采用参考模板法、外部模型法来识别出不同标号机械物体的外部特征;
79.s26、依次将不同标号的机械物体进行区分,并对能够监控到的机械物体进行跟踪处理,若单一预警识别组件内采集到多个机械物体时,则以第一个检测到的为高优先级;
80.s27、将机械物体标号目标的动作与划定的禁区范围进行对比,若该目标的动作已涉入禁区时,则直接对安保人员进行连接警示,或直接进行报警处理;
81.s28、当多个预警识别组件发现机械物体目标时,等待第一个预警事件完成跟踪后,云台响应第二个预警识别组件的触发并进行跟踪,对后续预警事件处理,以此类推;
82.s29、针对涉入禁区机械物体,进行声光报警,对不听劝阻者,进行拒止设备(车辆干扰器、无人机干扰器等)的远程控制,对涉入禁区机械物体进行非致命拒止打击。
83.以上所述实施例仅表达了本发明的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1