一种翻转式摘果执行器
1.本发明涉及一种翻转式摘果执行器,属于果品采摘机械设备领域。
背景技术:
2.目前,果园采摘要想保证果品的完整无伤,多数都需要投入大量人力进行手工采摘,效率低下、成本较高。特别是对于应季新鲜果品,现有果园机械更是有诸多不足,例如很多摘果器利用刀片切断果品上方的果蒂,从而收入网袋之中,但常常难以避免对果品的意外损伤。虽然对于果酱等特殊果品,可以使用机械振摇式采摘,但对果品高度却有相当的局限性,实际效果仍然不够理想。
3.通过考察现有果品采摘技术,主要存在的关键问题有三点,一是对果品进行采摘时容易造成果品损伤和缺损;二是工作效率较低,难以真正超越人工采摘;三是现有摘果器结构较复杂,可靠性不高。因此需要设计一种翻转式摘果执行器。
技术实现要素:
4.针对现有技术中存在的不足和缺陷,本发明提供了一种新的可行的执行器设计方案,利用平面四杆机构的轨迹特性,在夹持住果品后,同时进行翻转与下拉动作,使果品与枝干分离于果蒂脆弱处,最大可能地避免采摘作业对果品的损伤。
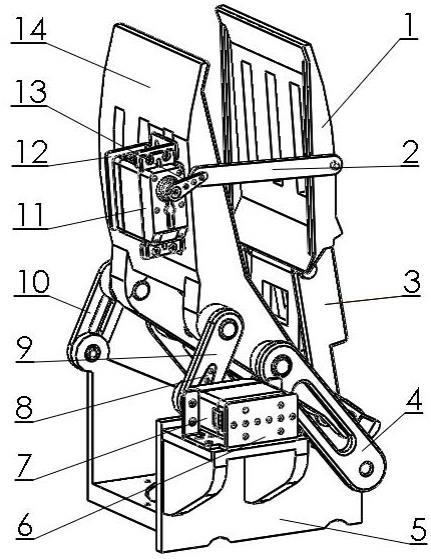
5.本发明针对鲜果采摘所采用的技术方案是一种翻转式摘果执行器,包括上颌1、开合连杆2、上颌连杆3、从动后侧臂4、底座5、翻转舵机支架6、翻转舵机7、翻转舵机连接臂8、主动前侧臂9、从动前侧臂10、开合舵机11、开合舵机支架12、开合舵机连接臂13、下颌14、颌间销轴15,其特征在于:所述下颌14通过主动前侧臂9、从动前侧臂10和一对从动后侧臂4连接在底座5上,所述上颌1通过上颌连杆3、颌间销轴15与下颌14相连,所述开合舵机11通过开合舵机支架12固定于下颌14上,开合舵机11通过开合舵机连接臂13、开合连杆2与上颌1相连接,翻转舵机7通过翻转舵机支架8固定于底座5上,所述主动前侧臂9通过翻转舵机连接臂8与翻转舵机7相连接。
6.摘果器通过开合舵机11使上颌1与下颌14夹持住果品,翻转舵机7带动机构翻转,使得果品与果蒂分离,而后翻转舵机7复位、开合舵机11复位,摘果器释放果品,使得果品由底座5中央的圆形通孔落下,实现采摘。
7.机械式摘果执行器的工作原理是:将机械式摘果执行器安装在机械臂末端,进行果品采摘时,首先使开合舵机11旋转,上颌1及上颌连杆3在开合连杆的推力作用下远离下颌14,采摘手张开;待果品进入上颌1与下颌14之间的空隙中,开合舵机11反转,开合连杆2将上颌1拉向下颌14,采摘手夹紧果品;翻转舵机7顺时针旋转约90
°
,带动下颌14、上颌1、上颌连杆3夹持着果品进行翻转,使得果蒂弯折断裂,果品与果蒂分离;翻转舵机7反转90
°
复位,开合舵机11顺时针转动,带动采摘手释放果品,果品随之落入底座5的圆形通孔中,从而进入果品收集装置,开合舵机11反转复位使采摘手回到初始位置,一次果品采摘完成。
8.摘果执行器的底座5中央设置一圆形通孔,其直径大小能够确保果品顺利通过,通孔可以与柔性传输管相连,以便于果品采摘后的传送与收集。其有益效果是:使得目标果品的收集系统简单可靠,也尽可能地降低了果品在收集过程中的损伤率。
9.机械式摘果执行器的运动学原理,利用平面四杆机构的轨迹特性,模拟人工采摘过程,实现对果品的弯折动作。其有益效果是:利用平面四杆机构的的轨迹特性,使得对果品的夹持和弯扭动作平稳、迅速、连贯。
10.摘果执行器的底座5侧面,设计有一安装平台,以便安装翻转舵机支架6,并为翻转舵机7的旋转承受足够的扭矩。其有益效果是:大大提高了摘果执行器的结构强度和稳定性,延长了摘果执行器的工作寿命。
11.在机械式摘果执行器与果品直接接触的夹持面上,包覆一层形状适应性良好、厚度适中、有足够摩擦系数的柔性材料。其有益效果是:增大夹持面与果品之间的贴合度,增强夹持果品时的可靠性,避免夹持面对果品的损伤。
附图说明
12.图1、图2为一种翻转式摘果执行器的结构图。
13.图3为一种翻转式摘果执行器的初始状态。
14.图4为一种翻转式摘果执行器的预备/释放状态。
15.图5为一种翻转式摘果执行器的夹持/复位状态。
16.图6为一种翻转式摘果执行器的弯折状态(省略翻转舵机7、翻转舵机支架6)。
具体实施方式
17.下面结合附图1~6对本发明作更进一步的说明:一种翻转式摘果执行器,包括上颌1、开合连杆2、上颌连杆3、从动后侧臂4、底座5、翻转舵机支架6、翻转舵机7、翻转舵机连接臂8、主动前侧臂9、从动前侧臂10、开合舵机11、开合舵机支架12、开合舵机连接臂13、下颌14、颌间销轴15,其特征在于:所述下颌14通过主动前侧臂9、从动前侧臂10和一对从动后侧臂4连接在底座5上,所述上颌1通过上颌连杆3、颌间销轴15与下颌14相连,所述开合舵机11通过开合舵机支架12固定于下颌14上,开合舵机11通过开合舵机连接臂13、开合连杆2与上颌1相连接,翻转舵机7通过翻转舵机支架8固定于底座5上,所述主动前侧臂9通过翻转舵机连接臂8与翻转舵机7相连接。
18.上述所述摘果器通过开合舵机11使上颌1与下颌14夹持住果品,翻转舵机7带动机构翻转,使得果品与果蒂分离,而后翻转舵机7复位、开合舵机11复位,摘果器释放果品,使得果品由底座5中央的圆形通孔落下,实现采摘。
19.所述机械式摘果执行器的一次摘果周期内,摘果器的各主要状态如图2~5所示,依照时间顺序依次为:初始状态、预备状态、夹持状态、弯折状态、复位状态、释放状态、初始状态。初始状态为摘果执行器尚未开始工作时的状态;工作时上下颌张开即为预备采摘状态;待果品伸入上下颌之间,执行器闭合夹持住果品;随后摘果执行器逆时针翻转约90
°
,果蒂受到弯折而断裂;执行器顺时针返程,到达复位状态;随后上下颌张开,果品被释放并落入下方的圆形收集孔;最终采摘完成,执行器回到初始状态。
20.本发明机构简单,动作高效,可靠性高,通过调节张口的幅度可以适用于不同果品
采摘,作为执行器安装在多种机械臂上执行采摘作业。
21.对于本领域的普通技术人员而言,根据本发明的教导,在不脱离本发明的原理与精神的情况下,对实施方式所进行的改变、修改、替换和变型仍落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1