吸扫一体式清粪机器人及其清粪方法与流程
[0001]
本发明涉及机器人技术,具体涉及一种吸扫一体式清粪机器人及其清粪方法。
背景技术:
[0002]
粪便的清理是畜牧养殖业中一项较为麻烦的问题,畜牧粪便难以清理且含有较多有害物质及病菌,若不及时清理会污染畜牧养殖环境进而出现一系列疾病卫生问题。传统养殖业均采用人工清粪的方式,劳动量大且疾病风险高,相比传统养殖,规模化养殖大多采用自动刮粪机械的方式,但是这种方式前期成本大且难以维护。作为无人化农场中的重要机械,清粪机器人对于畜牧养殖卫生以及疾病防控非常重要,当时市面上大多数清粪机械均采用刮粪式清粪方法,这种清粪方法效率低且清粪效果不好。
技术实现要素:
[0003]
本发明的目的是为了克服以上现有技术存在的不足,提供了一种吸扫一体式清粪机器人。此吸扫一体式清粪机器人的清洁效率高,且清粪效果好。
[0004]
本发明的另一目的是提供了一种吸扫一体式清粪机器人的清粪方法。
[0005]
本发明的目的通过以下的技术方案实现:本吸扫一体式清粪机器人,包括机身、驱动机构、清粪机构、集粪机构、导航机构、电源机构和控制机构,所述驱动机构安装于机身的下端,所述清粪机构和集粪机构均安装于机身,所述驱动机构、清粪机构和集粪机构均与电源机构连接,所述驱动机构、清粪机构、集粪机构、导航机构和电源机构均与控制机构连接。
[0006]
优选的,所述清粪机构包括毛刷、毛刷电机、前喷头、后喷头和储水箱,所述毛刷安装于机身的前端,所述毛刷电机安装于机身内,且所述毛刷电机的动力输出轴与毛刷连接,所述前喷头和后喷头分别安装于机身的前端和后端,且所述前喷头和后喷头分别与前水泵和后水泵连接,所述前水泵和后水泵通过相应水管均与水箱连接,所述毛刷电机、前水泵和后水泵均与控制机构连接。
[0007]
优选的,所述清粪机构还包括左刮粪板、右刮粪板和中间刮粪板,所述左刮粪板和右刮粪板分别安装于机身前端的左侧和右侧,所述中间刮粪板安装于机身的下面,且所述左刮粪板、右刮粪板和中间刮粪板拼接形成集粪腔。
[0008]
优选的,所述集粪机构包括吸粪口、输粪管、真空泵和储粪箱,所述吸粪口安装于机身的下面,且所述吸粪口与集粪腔相通,所述输粪管的一端与吸粪口连接,所述输粪管的另一端与储粪箱连接,所述真空泵与储粪箱连接,所述真空泵与控制机构连接。
[0009]
优选的,所述储水箱为伸缩折叠式储水箱,此伸缩折叠式储水箱安装于储粪箱内。
[0010]
优选的,所述驱动机构包括左驱动轮、右驱动轮、万向轮、左驱动电机和右驱动电机,所述左驱动轮和右驱动轮分别安装于机身的后端的两侧,所述左驱动电机和右驱动电机均安装于机身内,且所述左驱动电机和右驱动电机分别与左驱动轮和右驱动轮连接,所述万向轮安装于机身的前端,所述左驱动电机和右驱动电机均与控制机构连接。
[0011]
优选的,所述导航机构包括相机,此相机与控制机构连接。
[0012]
优选的,所述电源机构包括电池组和充电电路,所述清粪机构、集粪机构、导航机构、电源机构和控制机构均与电池组连接,所述机身设有充电头,此充电头通过充电电路与电池组连接。
[0013]
优选的,所述控制机构包括第一控制器和第二控制器,所述导航机构与第一控制器连接,所述驱动机构、清粪机构、集粪机构和电源机构均与第二控制器连接,所述第一控制器与第二控制器信号连接。
[0014]
一种基于上述的吸扫一体式清粪机器人的清粪方法,包括以下步骤:
[0015]
s1、前喷头对机身前方的雾化喷水,以将机身前方的粪便湿润;
[0016]
s2、机身带动毛刷移动,同时毛刷电机驱动毛刷转动,以对被湿润的粪便进行清扫,且将湿润的粪便汇集到集粪腔内;
[0017]
s3、集粪机构启动,位于集粪腔内的粪便通过吸粪口和输粪管被吸入储粪箱内;
[0018]
s4、后喷头进行雾化喷水以对毛刷的清扫轨迹进行二次清理;
[0019]
s5、储粪箱被装满后,将储粪箱内的粪便统一排放至粪池中。
[0020]
本发明相对于现有技术具有如下的优点:
[0021]
1、本发明中的吸扫一体式清粪机器人主要有机身、驱动机构、清粪机构、集粪机构、导航机构、电源机构和控制机构构成,这先利用清粪机构对地面的粪便进行清扫,并将粪便汇集一起,再通过集粪机构收集进行统一处理,这清理效率高,可适用于大部分环境,如猪舍、鸡舍。
[0022]
2、本发明中的吸扫一体式清粪机器人中清粪机构利用前喷头、毛刷和后喷头对粪便进行多次清理,而集粪机构采用吸粪式清粪,即本发明中采用水洗、毛刷清扫及真空吸粪结合对地面的粪便进行清扫,这不仅清洁效率高,且清洁效果好。
[0023]
3、本发明中的吸扫一体式清粪机器人采用控制机构对驱动机构、清粪机构、集粪机构、导航机构和电源机构进行控制管理,以实现自主化清粪、排粪、加水及充电等操作,智能化程度高。
[0024]
4、本发明的清粪方法采用上述的智能喷头水洗、毛刷清扫及真空吸粪结合对地面的粪便进行清扫,清粪效率高,且效果好;同时智能化程度高。
附图说明
[0025]
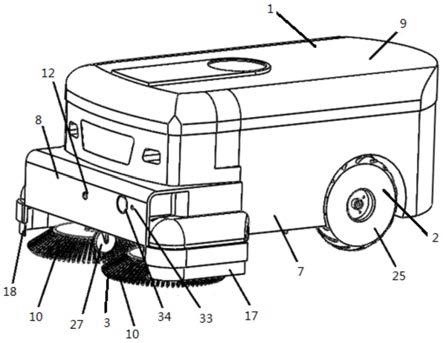
图1是本发明的吸扫一体式清粪机器人的结构示意图。
[0026]
图2是本发明的吸扫一体式清粪机器人的内部结构示意图。
[0027]
图3是本发明的吸扫一体式清粪机器人的仰视图。
[0028]
图4是本发明的吸扫一体式清粪机器人的前视图。
[0029]
图5是本发明的吸扫一体式清粪机器人的后视图。
[0030]
图6是本发明的储粪箱的透视图。
[0031]
图7是本发明的吸扫一体式清粪机器人中前壳内的结构示意图。
[0032]
其中,1为机身,2为驱动机构,3为清粪机构,4为集粪机构,5为导航机构,6为电源机构,7为主壳,8为前壳,9为顶盖,10为毛刷,11为毛刷电机,12为前喷头,13为后喷头,14为储水箱,15为前水泵,16为后水泵,17为左刮粪板,18为右刮粪板,19为中间刮粪板,20为集粪腔,21为吸粪口,22为输粪管,23为真空泵,24为储粪箱,25为左驱动轮,26为右驱动轮,27
为万向轮,28为左驱动电机,29为右驱动电机,30为左减速器,31为右减速器,32为电池组,33为充电头,34为加水口,35为相机。
具体实施方式
[0033]
下面结合附图和实施例对本发明作进一步说明。
[0034]
如图1至图5所示的吸扫一体式清粪机器人,包括机身、驱动机构、清粪机构、集粪机构、导航机构、电源机构和控制机构,所述驱动机构安装于机身的下端,所述清粪机构和集粪机构均安装于机身,所述驱动机构、清粪机构和集粪机构均与电源机构连接,所述驱动机构、清粪机构、集粪机构、导航机构和电源机构均与控制机构连接。具体的,机身主要由主壳、前壳和顶盖构成,其中前壳固定于主壳的前端,而顶盖安装于主壳的上端。主壳、前壳和顶盖形成安装腔,驱动机构、电源机构和控制机构中的元器件安装于安装腔内,则主壳、前壳和顶盖可对这些元器件起到防尘防污的效果。
[0035]
所述清粪机构包括毛刷、毛刷电机、前喷头、后喷头和储水箱,所述毛刷安装于机身的前端,所述毛刷电机安装于机身内,且所述毛刷电机的动力输出轴与毛刷连接,所述前喷头和后喷头分别安装于机身的前端和后端,且所述前喷头和后喷头分别与前水泵和后水泵连接,所述前水泵和后水泵通过相应水管均与水箱连接,所述毛刷电机、前水泵和后水泵均与控制机构连接。具体的,如图1至图4所示,本实施例中毛刷和毛刷电机的数量均为2个,2个毛刷分别安装于机身的前端的两侧,2个毛刷电机分别安装于机身安装腔的两侧,且2个毛刷电机分别与2个毛刷连接。在工作过程中,2个毛刷电机分别驱动2个毛刷转动,且2个毛刷转动的方向相反,从而可将粪便扫入集粪腔内,以方便集粪机构装饰粪便吸入。前喷头安装于机身的前端端面,要将粪便清扫前,前喷头喷射出雾化的水,以将机身前方的粪便湿润,从而方便转动的毛刷对粪便进行清扫。而后喷头安装于机身的后端端面。机身原前方具有的粪便地面先经过前喷头湿润、毛刷清扫及刮粪板汇集刮粪后,再采用后喷头对这地面喷洗,以进行二次清洁,从而大大提高了清洁效果;同时这采用多种方法对粪便进行处理,也提高了工作效率。其中,在机身的前端设有加水口,此加水口与水箱连接,以方便给水箱补充水。
[0036]
所述清粪机构还包括左刮粪板、右刮粪板和中间刮粪板,所述左刮粪板和右刮粪板分别安装于机身前端的左侧和右侧,所述中间刮粪板安装于机身的下面,且所述左刮粪板、右刮粪板和中间刮粪板拼接形成集粪腔。具体的,左刮粪板、右刮粪板和中间刮粪板均采用金属材料制成主体,此主体再被橡胶包裹。此设置不仅保证各将刮粪板将地面刮干净,还可降低噪音。同时,为提高粪的汇集效果,中间刮粪板呈圆弧状,即中间刮粪板的中部凸向机身的后端。
[0037]
所述集粪机构包括吸粪口、输粪管、真空泵和储粪箱,所述吸粪口安装于机身的下面,且所述吸粪口与集粪腔相通,所述输粪管的一端与吸粪口连接,所述输粪管的另一端与储粪箱连接,所述真空泵与储粪箱连接,所述真空泵与控制机构连接。在工作过程中,真空泵对储粪箱的内腔进行抽真空处理,以令储粪箱的内腔形成负压,从而集粪腔中的粪便自吸粪口入,再通过输粪管进入储粪箱的内腔。为方便将储粪箱内的粪便排出,储粪箱还设有排粪管。当储粪箱被装满后,机器人行驶至粪池,然后储粪箱中的粪便再通过排粪管排出到粪池中,以完成粪便的集中处理。
[0038]
如图6所示,所述储水箱为伸缩折叠式储水箱,此伸缩折叠式储水箱安装于储粪箱内。此设置可提高机身安装腔的利用率,保证整体的紧凑性。
[0039]
所述驱动机构包括左驱动轮、右驱动轮、万向轮、左驱动电机和右驱动电机,所述左驱动轮和右驱动轮分别安装于机身的后端的两侧,所述左驱动电机和右驱动电机均安装于机身内,且所述左驱动电机和右驱动电机分别与左驱动轮和右驱动轮连接,所述万向轮安装于机身的前端,所述左驱动电机和右驱动电机均与控制机构连接。具体的,左驱动轮、右驱动轮和万向轮均采用橡胶轮,以防止打滑,保证整个机器人稳定行驶,以保证清粪机构和集粪机构有效工作。为进一步保证行驶的稳定性,左驱动电机通过左减速器与左驱动轮连接,右驱动电机通过右减速器与右驱动轮连接。
[0040]
所述导航机构包括相机,此相机与控制机构连接。相机用于检测环境图像信息,如障碍物(如猪舍内工作人员和猪)及目标物(即粪便)等,然后将检测到的环境图像信息输送给第一控制器,第一控制器根据此环境图像信息进行粪污识别,从而进行清粪操作。
[0041]
如图7所示,所述电源机构包括电池组和充电电路,所述清粪机构、集粪机构、导航机构、电源机构和控制机构均与电池组连接,所述机身的前端设有充电头,此充电头通过充电电路与电池组连接。电池组采用额定电压为24v的锂电池,且此电池组自带有电源监测传感器,当电池组的电压低于设定值时,第二控制器发出控制指令,机器人按规划路线返回充电。为方便充电,电源机构中的充电头设置于机身的前端,此充电头通过充电电路与电池组连接。本实施例中的充电电路可采用常规的充电电路,以减少设计成本。
[0042]
所述控制机构包括第一控制器和第二控制器,所述导航机构与第一控制器连接,所述驱动机构、清粪机构、集粪机构和电源机构均与第二控制器连接,所述第一控制器与第二控制器信号连接。具体的,本实施例第一控制器采用树莓派,第二控制器采用stm32f103微处理器。其中,第一控制器与导航机构中的相机连接,以接收相机检测到的环境图像信息,并对图像信息进行处理,然后将处理结果输送给第二控制器,第二控制器根据第一控制器的处理结构以发出控制指令,从而控制驱动中的左驱动电机和右驱动电机、清粪机构中毛刷电机、集粪机构的真空泵及电源机构工作。这采用第一控制器和第二控制器分别对种部件的信息进行接收处理,响应速度快,进一步提高工作效率。
[0043]
一种基于上述的吸扫一体式清粪机器人的清粪方法,包括以下步骤:
[0044]
s1、前喷头对机身前方的雾化喷水,以将机身前方的粪便湿润;
[0045]
s2、机身带动毛刷移动,同时毛刷电机驱动毛刷转动,以对被湿润的粪便进行清扫,且将湿润的粪便汇集到集粪腔内;
[0046]
s3、集粪机构启动,位于集粪腔内的粪便通过吸粪口和输粪管被吸入储粪箱内;
[0047]
s4、后喷头进行雾化喷水以对毛刷的清扫轨迹进行二次清理;
[0048]
s5、储粪箱被装满后,将储粪箱内的粪便统一排放至粪池中。
[0049]
具体的,本吸扫一体式清粪机器人的清粪方法采用喷头水洗、毛刷清扫和吸粪式收集等多种方式对地面上的粪便进行处理,这不仅工作效率高,且工作效果好。
[0050]
上述具体实施方式为本发明的优选实施例,并不能对本发明进行限定,其他的任何未背离本发明的技术方案而所做的改变或其它等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1