风送植保设备的制作方法
1.本发明涉及一植保设备,特别涉及一风送植保设备。
背景技术:
2.中国的果园面积和水果产量位居世界第一,林果业在很多地区是农民增收的重要支柱产业,在我国的经济发展中也占有重要地位。在果树的成长过程中,需要多次给果树打药,以杀灭害虫,保障果树的产量和水果质量。市面上常见的打药农具是喷雾器,果农们通过背着喷雾器逐个地为果树打药,以降低果树病虫危害的可能。
3.但是在实际的作业过程中,利用现有的喷雾器进行打药作业存在不少问题。首先,杀灭病虫的药剂本身具有较强毒性,而果园内,果树茂密,通风质量较差,在打药的过程中,不少药剂被果农们吸入体内,容易对人体产生伤害,不利于果农的身体健康。其次,依靠人力作业,难以全面均匀地将药剂喷洒到果树的各个部位,而且果园面积大,果树数量较多,一棵棵树打药,作业量极大,劳动强度高,不仅提高了打药作业的人力成本,也延长了果农们在药剂弥漫的环境中逗留的时间。另外,很多果树的枝叶的高度都超过人体高度,果农在打药的过程中,很多高处的枝叶无法喷洒到药剂,难以全面地杀灭害虫。
技术实现要素:
4.本发明的一个目的在于提供一风送植保设备,其中所述送风设备能够沿着一预设路径自动地在果园内行驶,并对果园内的果树喷洒农药,以杀灭害虫,保障果树的健康成长,替代了人工打药,不仅降低了工作人员的工作强度,而且避免工作人员受到农药的伤害。
5.本发明的另一个目的在于提供一风送植保设备,其中所述风送植保设备通过产生气流的方式将喷洒出的农药吹送至果树的各个部位,使得农药能够全面地附着于果树,以利于全面地杀灭害虫。
6.本发明的另一个目的在于提供一风送植保设备,其中所述风送植保设备产生的高速气流使得喷洒出的农药快速地覆盖果树,提高了所述风送植保设备的作业效率。
7.本发明的另一个目的在于提供一风送植保设备,其中所述风送植保设备产生的高速气流能使得果树的叶片翻动,有利于农药穿过茂密的果树枝叶,进而提高农药的附着率。
8.本发明的另一个目的在于提供一风送植保设备,其中所述风送植保设备自动导航地按照所述预设路线移动,并自动完成植保作业,提高了所述风送植保设备的自动化和智能化程度。
9.本发明的另一个目的在于提供一风送植保设备,其中所述风送植保设备能够自动识别周围的物体,以精准地打药,提高农药的利用率。
10.本发明的另一个目的在于提供一风送植保设备,其中所述风送植保设备自动对经过的物体进行识别和标记,不仅能够保障所述风送植保设备按照所述预设路线行驶,而且还能防止重复作业。
11.本发明的另一个目的在于提供一风送植保设备,其中所述风送植保设备能够自动识别行驶路径上的障碍物和行人,并自动避让障碍物和行人,提高了所述风送植保设备的智能性。
12.本发明的另一个目的在于提供一风送植保设备,其中所述风送植保设备允许作业人员远程控制,且一个作业人员可以同时控制多个所述风送植保设备的行驶状态和作业状态,以提高作业效率,并降低人力成本。
13.本发明的另一个目的在于提供一风送植保设备,其中所述风送植保设备可以根据使用需求选择自动导航模式或是远程遥控模式,提高了所述风送植保设备的灵活性和实用性。
14.本发明的另一个目的在于提供一风送植保设备,其中所述风送植保设备实时地采集行走过程中的图像,以供作业人员根据采集的图像控制所述风送植保设备的行驶状态和工作状态。
15.本发明的另一个目的在于提供一风送植保设备,其中所述风送植保设备能够自行检测农药的液位,并当农药的液位低于一标准液位后,所述风送植保设备及时提醒作业人员,避免农药液位过低而影响所述风送植保设备的正常工作。
16.依本发明的一个方面,本发明提供一风送植保设备,其适用于喷洒一农药,所述风送植保设备包括:
17.一行走机构;
18.一药箱,其中所述药箱被设置于所述行走机构,供容纳所述农药;
19.一喷洒机构,其中所述喷洒机构被连通于所述药箱,供雾化所述农药;
20.一风机,其中所述风机具有一进风口和被连通于所述进风口的一出风口,所述风机以所述出风口朝向所述喷洒机构的方式被设置于所述喷洒机构的一侧,其中所述风机能够朝向所述喷洒机构产生气流,并吹动雾化后的所述农药。
21.根据本发明的一个实施例,所述风送植保设备的所述喷洒机构包括一喷洒主体和被联通于所述喷洒主体的多个喷头,其中所述喷洒主体被连通于所述药箱,多个所述喷头间隔地设置于所述喷洒主体。
22.根据本发明的一个实施例,所述风送植保设备的所述喷洒机构包括一喷洒主体和被联通于所述喷洒主体的多个喷头,其中所述喷洒主体被连通于所述药箱,多个所述喷头间隔地设置于所述喷洒主体。
23.根据本发明的一个实施例,所述喷洒机构进一步包括一导流主体,其中所述导流主体具有多个相互间隔的导流腔,所述导流主体被设置于所述风机和所述喷洒主体之间,所述导流主体的所述导流腔被连通于所述风机的所述出风口,所述喷头被保持于所述导流腔内。
24.根据本发明的一个实施例,所述导流主体包括一阻挡板和多个导流板,其中所述阻挡板被设置于所述风机的所述出风口的外围,所述导流板相互间隔地自所述阻挡板延伸至所述喷洒主体,并在所述导流板、所述阻挡板以及所述喷洒主体之间形成所述导流腔。
25.根据本发明的一个实施例,多个所述喷头间隔地设置于所述喷洒主体的两侧。
26.根据本发明的一个实施例,多个所述喷头间隔地环绕于所述喷洒主体。
27.根据本发明的一个实施例,所述风送植保设备进一步包括一导航装置和一控制装
置,其中所述导航装置被可通信地连接于所述控制装置,所述控制装置被可通信地连接于所述行走机构,所述导航装置能够生成一控制命令,其中所述控制装置在执行所述控制控制命令时,控制所述行走机构沿着一预设路径行驶。
28.根据本发明的一个实施例,所述控制装置被可通信地连接于所述喷洒机构,所述控制装置在执行所述控制控制命令时,调整所述喷洒机构的工作状态。
29.根据本发明的一个实施例,所述导航装置实现自主导航的方式选自:rtk导航、gps导航、视觉导航以及磁导航组成的类型组。
30.根据本发明的一个实施例,所述导航装置以远离所述喷洒机构的方式被安装于所述药箱。
31.根据本发明的一个实施例,所述风送植保设备进一步包括一图像采集装置,其中所述图像采集装置被可通信地连接于所述导航装置,其中所述导航装置根据所述图像采集装置获取的一图像信号生成对应的所述控制命令。
32.根据本发明的一个实施例,所述导航装置对所述图像采集装置获取的所述图像信号进行分析,并识别图像中的各个物体,同时,标识待施药的物体,进而生成对应的所述控制命令。
33.根据本发明的一个实施例,所述导航装置对所述图像采集装置获取的所述图像信号进行分析,并识别图像中的各个物体,同时标记已经施药的物体。
34.根据本发明的一个实施例,所述风送植保设备其中进一步包括一远程遥控装置,所述远程遥控装置被可通讯地连接于所述导航装置,所述远程遥控装置产生一遥控信号,所述导航装置接收所述遥控信号并产生对应的所述控制命令。
35.根据本发明的一个实施例,所述远程遥控装置包括一遥控主体、多个遥控键以及一显示屏,其中所述遥控键和所述显示屏被设置于所述遥控主体,所述显示屏被可通信地连接于所述遥控主体,所述遥控主体被可通信地连接于所述图像采集装置。
36.根据本发明的一个实施例,所述遥控键被可通信地连接于所述遥控主体,且所述遥控主体被可通信地连接于所述导航装置,每个所述遥控键对应不同的操作指令。
37.根据本发明的一个实施例,所述远程遥控装置利用wifi6技术被可通信地连接于所述图像采集装置。
38.根据本发明的一个实施例,所述远程遥控装置为一手持遥控装置。
39.根据本发明的一个实施例,所述的风送植保设备进一步包括至少一障碍探测装置,其中所述障碍探测装置被可通信地连接于所述导航装置,其中所述导航装置根据所述障碍探测装置获取的一路面信息生成对应的所述控制命令。
40.根据本发明的一个实施例,所述障碍探测装置的具体类型选自:摄像装置、激光探测器、微波探测器以及传感器组成的类型组。
41.根据本发明的一个实施例,所述障碍探测装置被可通信地连接于所述远程遥控装置。
42.根据本发明的一个实施例,所述风送植保设备进一步包括一液位探测器,其中所述液位探测器被设置于所述药箱,所述液位探测器被可通信地连接于所述远程遥控装置。
43.根据本发明的一个实施例,所述液位探测器被可通信地连接于所述导航装置。
44.根据本发明的一个实施例,所述药箱具有一透明的可视窗口,其中所述可视窗口
形成于所述药箱的侧部。
附图说明
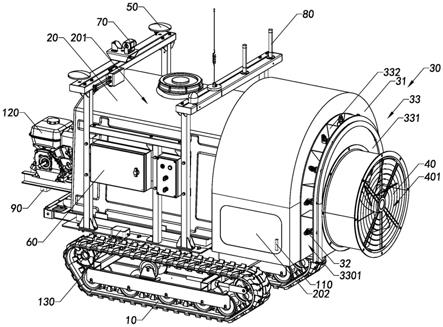
45.图1a是根据本发明的一较佳实施例的一风送植保设备的立体图示意图。
46.图1b是根据本发明的上述较佳实施例的所述风送植保设备的部分结构的示意图。
47.图2是根据本发明的上述较佳实施例的所述风送植保设备的应用图示意图,其示出了所述风送植保设备通过导航系统自主行驶,自动对果树进行打药。
48.图3是根据本发明的上述较佳实施例的所述风送植保设备的应用图示意图,其示出了所述风送植保设备通过产生气流的方式将雾化后的农药吹送至果树。
49.图4是根据本发明的上述较佳实施例的所述风送植保设备的应用图示意图,其示出了所述风送植保设备对经过的物体进行识别,以精准地打药。
50.图5是根据本发明的上述较佳实施例的所述风送植保设备的应用图示意图,其示出了所述风送植保设备对经过的物体进行标记和识别,以保障行驶路径无误。
51.图6是根据本发明的上述较佳实施例的所述风送植保设备的应用图示意图,其示出了所述风送植保设备实时地采集行走过程中的图像,并传输至一遥控装置,用户可根据遥控装置远程调整行驶路径和药剂参数等。
52.图7是根据本发明的上述较佳实施例的所述风送植保设备的应用图示意图,其示出了所述风送植保设备自行对障碍物进行检测,及时避让障碍物。
53.图8是根据本发明的上述较佳实施例的所述风送植保设备的应用图示意图,其示出了所述风送植保设备自行检测药剂液位,并反馈至所述遥控装置,当药剂液位低于标准液位,及时提醒用户。
具体实施方式
54.以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。在以下描述中界定的本发明的基本原理可以应用于其他实施方案、变形方案、改进方案、等同方案以及没有背离本发明的精神和范围的其他技术方案。
55.本领域技术人员应理解的是,在本发明的揭露中,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系是基于附图所示的方位或位置关系,其仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本发明的限制。
56.可以理解的是,术语“一”应理解为“至少一”或“一个或多个”,即在一个实施例中,一个元件的数量可以为一个,而在另外的实施例中,该元件的数量可以为多个,术语“一”不能理解为对数量的限制。
57.参照说明书附图1a至图8,根据本发明的一较佳实施例的一风送植保设备100将在接下来的描述中被阐述,其中所述风送植保设备100能够沿着一预设路径自动地在果园内行驶,并对果园内的果树喷洒农药,以杀灭害虫,保障果树的健康成长,所述风送植保设备100替代了人工打药,不仅降低了工作人员的工作强度,而且避免工作人员受到农药的伤
害。
58.值得一体的是,所述风送植保设备100的具体应用仅仅作为示例,所述风送植保设备100也可以被应用于为蔬菜、景观植被等施药。并且,所述风送植保设备100的具体实施方式仅仅作为示例,不能成为对本发明所述风送植保设备100的内容和范围的限制。
59.所述风送植保设备100包括一行走机构10、一药箱20以及一喷洒机构30,其中所述药箱20具有一容纳腔201,所述药箱20被设置于所述行走机构10,所述喷洒机构30被设置于所述药箱20,且所述喷洒机构30被连通于所述药箱20的所述容纳腔201。所述行走机构10沿着所述预设路径行驶的过程中,所述喷洒机构30能够将药箱20的所述容纳腔201内盛装的药剂雾化后喷洒至果树。
60.在本发明的一个具体的实施例中,所述喷洒机构30被设置于所述药箱20的侧部,所述喷洒机构30不受遮挡。可选地,所述喷洒机构30被设置于所述药箱20的上方。
61.值得一提的是,所述风送植保设备100的所述行走机构10的具体实施方式不受限制,所述行走机构10可以被实施为履带轮、万向轮或是其他本领域技术人员已知的行走结构。所述行走机构10的具体实施方式仅仅作为示例,不能成为对本发明所述风送植保设备100的内容和范围的限制。
62.具体来说,所述喷洒机构30包括一喷洒主体31和多个喷头32,其中所述喷头被连通于所述喷洒主体31,所述喷洒主体31被可连通地设置于所述药箱20。所述喷洒主体31将所述药箱20内的药剂输送至所述喷头32,所述喷头32将所述药剂雾化后喷出。
63.优选地,多个所述喷头32间隔地设置于所述喷洒主体31的两侧。这样,在所述行走机构10被驱动地行驶的过程中,所述喷洒机构30能够同时对所述风送植保设备100两侧的果树进行施药,有利于提高所述风送植保设备100的植保效率。更优选地,多个所述喷头32被间隔地环绕于所述喷洒主体31,即所述喷头32分布于所述喷洒主体31的前侧、后侧以及顶面,以增大所述喷洒主体31的喷洒量,进一步提高所述风送植保设备100的植保效率。
64.优选地,所述喷头32被可旋转地安装于所述喷洒主体31,通过转动所述喷头32的方式可以改变所述喷头32的喷洒朝向,有利于增大所述风送植保设备100的喷洒范围。
65.值得一提的是,所述喷头32的具体实施方式不受限制,例如但不限于所述喷头32可以被实施但不限于雾化喷头或是高压喷头等。并且,所述喷头32的具体数量不受限制,在本发明的这个具体的实施例中,所述喷头32分别被实施为八个。在本发明其他的实施例中,所述喷头32也可以被实施为两个、三个、四个、五个或是其他数量。本领域技术人员应该知晓的是,所述喷头32的具体实施方式和数量仅仅作为示例,不能成为对本发明所述风送植保设备100的内容和范围的限制。
66.参照图3,在本发明所述的风送植保设备100的这个具体的实施例中,所述风送植保设备100进一步包括一风机40,其中所述风机40具有一进风口401和连通于所述进风口401的一出风口402。所述风机40以所述出风口402朝向所述喷头32的方式被设置于所述喷洒机构30的所述喷头32的一侧。在所述风机40运作的过程中,外部的气流自所述风机40的所述进风口401被吸入所述风机40内,并自所述出风口402被吹出。所述风机40的所述出风口402吹出的气流将所述喷头32喷洒出的农药吹送至果树的各个部位,使得农药能够全面地附着于果树,以利于全面地杀灭害虫。
67.具体地,所述风送植保设备100的所述风机40产生的高速气流使得喷洒出的农药
快速地覆盖果树,提高了所述风送植保设备100的作业效率。而且,所述风机40产生的高速气流能使得果树的叶片翻动,有利于农药穿过茂密的果树枝叶,进而提高农药的附着率,并且所述风机40产生的锋利不会对果实或是果树的枝叶造成损坏。通过这样的方式,使得所述风送植保设备100具有喷雾质量好、用药省、用水少,作业效率高等优点。而且,所述风送植保设备100特别适合密植、间距小,树冠茂密、地区偏远等果园场景。
68.在本发明的这个具体的实施例中,所述风送植保设备100的所述喷洒机构30进一步包括一导流主体33,其中所述导流机构33具有多个导流腔3301,所述导流主体33被设置于所述喷洒主体31和所述风机40之间。每个所述喷头32分别被保持于所述导流腔3301内,所述导流主体33的所述导流腔3301被连通于所述风机40的所述出风口402,所述导流机构33引导所述风机40吹出的气流的方向,并将位于所述导流腔3301内的所述喷头32喷出的农药吹送至果树的各个部位。
69.具体来说,所述导流主体33包括一阻挡板331和多个导流板332,其中所述阻挡板331被设置于所述风机40的所述出风口402的外围,所述导流板332相互间隔地自所述阻挡板331延伸至所述喷洒主体31,并在所述导流板332、所述阻挡板331以及所述喷洒主体31之间形成所述导流腔3301,所述喷头32被保持于所述导流腔3301。所述阻挡板331和所述导流板332引导所述风机40产生的气流的流动方向,以保障所述风机40产生的气流能够将所述喷头32雾化后的农药吹送至果树,避免农药被无方向地喷洒到非作业区域。通过这样的方式,不仅有利于提高所述农药的覆盖面积和喷洒效率,而且减少了农药的浪费,有利于节约施药的成本。
70.优选地,所述风机40以所述出风口402的朝向允许被调整的方式保持于所述喷洒机构30的所述喷头32的一侧。通过改变所述风机40的所述出风口的朝向可以改变所述风送植保设备100的喷洒的农药的覆盖位置,不仅有利于精准地施药,而且扩大了所述风送植保设备100的喷洒范围。
71.优选地,所述导流板332被可活动地安装于所述阻挡板331,通过调节所述导流板332的安装角度的方式可以改变所述风机40产生的气流的运动方向,进而调节所述农药的覆盖位置。比如说,所述导流板332被可转动地安装于所述阻挡板331,通过转动所述导流板332可以改变不同导流板332之间的相对角度,进而改变不同的所述导流腔3301的形状和大小,以调节所述农药的喷洒角度和覆盖范围。可选地,所述导流板332被可拆卸的安装于所述阻挡板331,且所述导流板332的安装位置允许被选择,被安装于不同的安装位置的所述导流板332具有不同的倾斜角度,以使得所述农药的喷洒角度和覆盖位置能够被选择。可选地,所述导流板332和所述阻挡板一体成型。
72.在本发明所述的风送植保设备100的这个具体的实施例中,所述风送植保设备100进一步包括一导航装置50和一控制装置60,其中所述导航装置50被可通信地连接于所述控制装置60,所述控制装置60被可通信地连接于所述行走机构10。所述导航装置50能够及时地获取所述风送植保设备100所处位置和所述风送植保设备100所处位置的导航地图,并产生对应的控制命令,所述控制装置60在执行所述控制控制命令时,控制所述行走机构10沿着既定的所述预设路线行驶,以对作业区域内的果树进行全面地施药。
73.也就是说,所述风送植保设备100在自助导航的状态下完成植保作业,植保过程可以无需作业人员参与,并且作业人员也无需接触农药,不仅减轻了作业人员的工作负担,也
避免了农药对作业人员的伤害。
74.具体来说,在自主导航状态下,所述导航装置50借助基站信号,基于rtk导航坐标数据,结合相应算法,能够保证所述行驶机构10按照既定的所述预设路线自主行走。并且,当rtk信号不佳或信号干扰严重的果园场景,所述风送植保设备100的所述导航装置50还可以借助ai视觉技术,通过对包括但不限于树木、标记物、路径边缘等信息进行图像分割识别计算,进而对路径进行导航规划保证所述行走机构10运动的正确性。
75.优选地,所述导航装置50利用rtk导航、gps导航、视觉导航等技术实现所述风送植保设备100的自主导航控制。可选地,所述导航装置50也可以通过磁性导航的方式自主导航地沿既定的所述预设路线行驶,以对作业区域内的果树进行全面地施药。本领域技术人员应该理解的是,所述导航装置50的具体实施方式仅仅作为示例,不能成为对本发明所述风送植保设备100的内容和范围的限制。
76.参照图1a至图8,所述风送植保设备100进一步包括至少一图像采集装置70,其中所述信息采集装置70被可通信地连接于所述导航装置50,所述图像采集装置70采集关于所述风送植保设备100周围的环境信息的一图像信号。所述导航装置50能够对所述图像信号进行识和计算等,进而根据实际环境状况控制所述风送植保设备100自主导航地完成所述预设路线。
77.优选地,所述图像采集装置70被实施为一摄像装置,且所述图像采集装置70具有良好的防水性能。优选地,所述图像采集装置70被设置于所述药箱20的侧部或是顶部。可选地,所述图像采集装置70以远离所述喷洒机构30的方式被安装于所述药箱20,避免所述喷洒机构30喷出的农药影响所述图像采集装置70获取的图像信息。
78.值得一提的是,根据本发明的一个较佳实施例所述的风送植保设备100按照所述预设路线行驶并不是按照固定的预设路线行驶。比如说,所述预设路线可以是作业人员预先设定起点和终点,所述导航装置50根据起点和终点自动生成所述预设路线。进一步地,所述风送植保设备100在自主行驶的过程中,能够根据实际环境状况,实时地更新所述预设路线,并完成在所述起点和所述终点之间的果树的植保作业。在本发明的另一个具体的实施例中,作业人员可以选择植保区域,所述导航装置50根据被选定的植保区域生成对应的所述预设路线,所述风送植保设备100自行导航至被选定的植保作业,且所述导航装置50根据周围环境状况实时地更新所述预设路线。本领域技术人员应该理解的是,所述预设路线也可以是固定路线。所述预设路线的具体实时方式仅仅作为示例,不能成为对本发明所述风送植保设备的内容和范围的限制。
79.优选地,所述导航装置50被保持于所述行走机构10的上方。例如但不限于所述导航装置50被安装于所述药箱20。并且,所述导航装置50以远离所述喷洒机构30的方式被安装于所述药箱20,避免所述喷洒机构30喷出的农药附着于所述导航装置50,而影响所述导航装置50的正常工作。
80.参照图4,在本发明的一个具体的实施例中,所述控制装置60被可通信地连接于所述喷洒机构30,所述导航装置50对所述图像采集装置70获取的所述图像信号进行分析,并识别图像中的各个物体,同时,标识待施药的果树的具体位置,进而生成对应的所述控制命令。所述控制装置60在执行所述控制命令时控制所述喷洒机构30和所述行驶机构10,以保障所述喷洒机构30精准地施药。
81.参照图5,进一步,所述导航装置50对所述图像采集装置70获取的所述图像信号进行分析,并识别图像中的各个物体,同时对已经施药的果树进行标记,以便于区分已行驶区域、已完成作业区域、未行驶区域以及未作业区域。通过这样的方式,不仅能够保障所述风送植保设备100按照所述预设路线行驶,而且还能防止重复作业,有利于提高作业效率。
82.参照图6,本发明所述的风送植保设备100允许作业人员通过远程遥控的方式进行控制。具体来说,所述风送植保设备100进一步包括一远程遥控装置200,其中所述远程遥控装置200被可通讯地连接于所述导航装置50,所述远程遥控装置200产生一遥控信号,所述导航装置50接收所述遥控信号并产生对应的所述控制命令,所述控制装置60在执行所述控制命令时调整所述风送植保设备100的行驶状态和/或工作状态以符合作业人员的需求。
83.进一步地,作业人员可以实时地监控所述风送植保设备100周围的环境状况,进而根据所述风送植保设备100周围的环境状态调整所述风送植保设备100的所述行驶状态和/或工作状态。所述行驶状态包括但不限于加速、减速、转弯、后退、停止、启动、更新所述预设路径等。所述工作状态包括但不限于喷洒农药、停止喷药、增大喷洒量、减小喷洒量、喷洒位置等。
84.具体地,所述风送植保设备100的所述图像采集装置70被可通信地连接于所述远程遥控装置200,且所述图像采集装置70实时地将关于所述风送植保设备100周围的环境相关的所述图像信息传输至所述远程遥控装置200,以供作业人员能够实时地掌握所述风送植保设备100周围的环境状态,进而精准地控制所述风送植保设备100的所述行驶状态和/或所述工作状态。
85.也就是说,所述风送植保设备100既可以自主导航地完成植保作业,也可以允许作业人员远程控制地进行植保作业,作业人员可以根据使用需求选择自动导航模式或是远程遥控模式,提高了所述风送植保设备100的灵活性和实用性。而且,一个作业人员可以同时控制多台所述风送植保设备100的所述行驶状态和/或所述工作状态,降低了作业人员的劳动负荷,提高了植保效率。
86.在本发明所述的风送植保设备100的这个具体的实施例中,所述远程遥控装置200包括一遥控主体210、多个遥控键220以及一显示屏230,其中所述遥控键220和所述显示屏230被设置于所述遥控主体210。
87.所述显示屏230被可通信地连接于所述遥控主体210,所述遥控主体210被可通信地连接于所述图像采集装置70,所述遥控主体210接收所述图像采集装置70的所述图像信息,并将所述图像信息传输至所述显示屏230。作业人员通过所述显示屏230及时地了解所述风送植保设备100周围的环境状况,并实时掌握所述风送植保设备100的植保状况。
88.进一步地,所述遥控键220被可通信地连接于所述遥控主体210,且所述遥控主体210被可通信地连接于所述导航装置50,每个所述遥控键220对应不同的操作指令。用户通过选择不同的所述遥控键220,所述遥控主体210即向所述导航装置50发送对应的所述操作指令,所述导航装置50根据所述操作指令生成对应的所述控制命令,以调整所述风送植保设备100的所述行驶状态和/或所述工作状态。
89.所述风送植保设备100进一步包括一通信装置80,其中所述通信装置80被保持于所述药箱20的上方,所述通信装置80被可通信地连接于所述导航装置50、所述图像采集装置70以及所述远程遥控装置200,以允许所述远程遥控装置200与所述风送植保设备200的
所述导航装置50和所述图像采集装置70可以进行数据交流。
90.值得一提的是,所述通信装置80的具体实施方式不受限制,所述通信装置80可以通过无线传输或是有线传输的方式允许所述远程遥控装置200与所述导航装置50和所述图像采集装置70可以进行数据交流。优选地,在遥控模式下,所述远程遥控装置200通过无线方式,例如但不限于2.4g通信模块或wifi等可通信地连接所述导航装置50和所述图像采集装置70,以获得良好的通信信号。更优选地,所述远程遥控装置200利用wifi6技术被可通信地连接于所述图像采集装置70,以确保传输图像的清晰度和高质量。
91.所述远程遥控装置200的具体实施方式不受限制。优选地,所述远程遥控装置200可以被实施为一手持遥控装置。可选地,所述远程遥控装置200可以被实施为一立式遥控装置。优选地,所述远程遥控装置200的所述遥控键220为一实体键。可选地,所述远程遥控装置200的所述遥控键220为一虚拟键。本领域技术人员应该理解的是,所述远程遥控装置200的具体实施方式仅仅作为示例,不能成为对本发明所述风送植保设备100的内容和范围的限制。
92.优选地,参照图7,所述风送植保设备100进一步包括至少一障碍探测装置90,其中所述障碍探测装置90被可通信地连接于所述导航装置50,所述障碍探测装置90实时地探测所述风送植保设备100的路面信息,所述路面信息包括但不限于所述风送植保设备100的与行驶路径上的物体之间的实时距离。所述导航装置50能够根据所述障碍探测装置90获取的路面信息生成对应的所述控制命令,以控制所述风送植保设备100自动地避让障碍物,例如但不限于水坑、石块或是行人等。
93.根据本发明的一个具体的实施例,所述障碍探测装置90被实施为一摄像装置,所述障碍探测装置90通过实时地拍摄路面的方式获取所述路面信息,所述导航装置50对所述路面信息进行处理,并判断路面的障碍物是否会干扰所述风送植保设备100正常行驶。一旦所述导航装置50判断路面的障碍物会干扰所述风送植保设备100正常行驶,所述导航装置50通过所述控制装置60自动地调整所述风送植保设备100的所述行驶状态。可选地,所述障碍探测装置90在检测到障碍物后通过发出警示信号,例如但不限于发出警示声或是警示灯光等,及时地提醒作业人员。或者,所述导航装置50在判断路面的障碍物会干扰所述风送植保设备100正常行驶向后,向所述远程遥控装置200发出警示信息,及时地提醒作业人员避让障碍物。
94.在本发明的一个实施例中,所述障碍探测装置90为一激光探测器,所述障碍探测装置90通过激光探测的方式获取路面的图像信息。在本发明的另一个实施例中,所述障碍探测装置90为一微波探测器,所述障碍探测装置90通过微波探测的方式获取路面的图像信息。本领域技术人员应该理解的是,所述风送植保设备100自动避让障碍物的方式仅仅作为示例,不能成为对本发明所述风送植保设备100内容和范围的限制。所述障碍探测装置90也可以被实施为传感器等。
95.在本发明的一个具体的实施例中,所述障碍探测装置90被可通信地连接于所述远程遥控装置200,其中所述障碍探测装置90将所述路面信息实时地输送至所述远程遥控装置200,供作业人员根据所述路面信息及时地调整所述风送植保设备100的行驶状态和/或工作状态。
96.参照图8,所述风送植保设备100进一步包括一液位探测装置110,其中所述液位探
测装置110被设置于所述药箱20,所述液位探测装置110探测所述药箱20的所述容纳腔201内的所述农药的液位。所述液位探测装置110进一步被可通信地连接于所述远程遥控装置200,所述液位探测装置110实时地将所述农药的液位信息传输至所述远程遥控装置200,以便于作业人员及时地了解所述药箱20的所述容纳腔201内的所述农药的液位,进而能够及时地补给所述农药。
97.优选地,当所述药箱20的所述容纳腔201内的所述农药的液位低于一警戒值时,所述液位探测装置110发送一报警信号至所述远程遥控装置200,以提醒作业人员及时地补给所述农药,或是及时地调整所述风送植保设备100的工作状态。
98.在本发明的一个具体的实施例中,所述药箱20具有一透明的可视窗口202,其中所述可视窗口202形成于所述药箱20的侧部,作业人员可以通过所述可视窗口202观察所述药箱20的所述容纳箱201内的所述农药的液位,方便作业人员控制灌入的所述农药的量。
99.优选地,所述液位探测装置110被可通信地连接于所述导航装置50,当所述药箱20的所述容纳腔201内的所述农药的液位低于一警戒值时,所述液位探测装置110发送一报警信号至所述导航装置50,所述导航装置50生成对应的所述控制命令,所述控制装置60在执行所述控制命令时暂停所述喷洒机构30的作业,避免所述农药的液位低于所述警戒值而影响农药的效果。
100.所述风送植保设备100进一步包括一动力装置120,其中所述动力装置12被连接于所述行走机构10和所述喷洒机构30,其中所述动力装置12提供驱动所述行走机构10和所述喷洒机构30作业所需的能量。所述动力装置120的具体实施方式不受限制,所述动力装置12可以被实施为但不限于汽油机、柴油机或是本领域技术人员已知的其他动力装置。
101.所述风送植保设备100进一步包括一横向纠偏装置130,其中所述横向纠偏装置130被设置于所述行走机构10,所述横向纠偏装置130用于检测所述行走机构10的移动方向位移是否发生偏移。例如但不限于,所述横向纠偏装置130被设置于所述行走机构10的上方或是侧方。
102.本领域的技术人员可以理解的是,以上实施例仅为举例,其中不同实施例的特征可以相互组合,以得到根据本发明揭露的内容很容易想到但是在附图中没有明确指出的实施方式。
103.本领域的技术人员应理解,上述描述及附图中所示的本发明的实施例只作为举例而并不限制本发明。本发明的目的已经完整并有效地实现。本发明的功能及结构原理已在实施例中展示和说明,在没有背离所述原理下,本发明的实施方式可以有任何变形或修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1