具有回收功能的粪污自动识别定点消杀机器人及消杀方法
1.本发明涉及一种具有回收功能的粪污自动识别定点消杀机器人及消杀方法,属于畜牧养殖设备技术领域。
背景技术:
2.近年来,中国畜禽养殖业规模和产值不断增加,且畜禽产品种类、总量和产值等均距世界前列。然而随着畜禽养殖集约化程度不断提高,高密度养殖对畜禽舍内防疫安全形成巨大挑战。
3.由于防疫消毒喷雾作业频次高、操作规范严格、作业环境恶劣,依靠人工进行防疫消毒耗时费力,且不利于保证作业标准和防疫效果,因此,研发和应用自动化防疫消毒设备,代替或辅助人力作业,对于保障中国畜禽养殖安全和高效生产具有重要意义。
4.养殖舍内自动化防疫消毒喷雾作业设备是国内外养殖装备行业的研究热点,现有设备主要分为固定式和移动式两类。固定式喷雾设备主要为养殖舍顶部安装的喷雾管道,通过随管道阵列分布的喷头向下方喷洒药剂,其喷雾效率高,但是药液雾滴空间沉积均匀性差,且无法满足免疫喷雾对器械的清洁性要求。移动式喷雾设备主要通过移动平台承载喷雾部件在养殖舍内移动喷雾,以实现不同区域的防疫消毒,其通用性强,可兼顾消毒和免疫喷雾作业,但目前主要以背负式或手推式的半自动设备为主,作业效率较低。近年来,随着养殖模式集约化和标准化程度的不断提高,研发和应用全自动移动式防疫消毒机器人,可有效促进养殖舍内智能化高效管理。养殖舍内自主移动和药液高效雾化喷洒是机器人防疫消毒的必要前提。
5.目前我国普遍采用的消杀机器人存在移动平台生产成本高、覆盖式清洁的方式。其不仅会造成水资源的浪费,而且还会因为没有针对性清洁而造成清洁不彻底的现象。因此,急需一种能够有效解决传统消杀设备简陋、效率低、能耗高以及清洁不彻底等问题的定点消杀机器人。
技术实现要素:
6.本发明是为了解决上述技术问题,进而提供了一种具有回收功能的粪污自动识别定点消杀机器人及消杀方法。
7.本发明为解决上述技术问题所采用的技术方案是:
8.一种具有回收功能的畜禽舍粪污自动识别定点消杀机器人,它包括行走装置、安装在行走装置上的控制系统、粪污识别系统、清洁系统、消毒系统、回收系统及机械臂,
9.其中,所述行走装置包括车体以及驱动车体行走的驱动装置;
10.机械臂的一端与车体之间为转动连接,机械臂的另一端固装有清洁保护罩;
11.所述清洁系统包括清水箱、连通固接在清水箱一端的水泵、安装在清洁保护罩上的水喷头以及连接在水喷头与水泵之间的第一连接管路;
12.所述消毒系统包括消毒液箱、连通固接在消毒液箱一端的消毒液泵、安装在清洁
保护罩上的消毒液喷头以及连接在消毒液喷头与消毒液泵之间的第二连接管路;
13.所述回收系统包括污水箱、连通固接在污水箱一端的吸污泵以及两端分别与吸污泵及清洁保护罩连通的回收管道;
14.所述粪污识别系统将采集到的信息以数据的形式传输给所述控制系统,通过控制系统控制行走装置、清洁系统、消毒系统、回收系统及机械臂的动作。
15.进一步地,所述回收管道、所述第一连接管路及所述第二连接管路均埋设在机械臂内,第一连接管路上靠近水喷头的一端部及第二连接管路上靠近消毒液喷头的一端部均埋设在清洁保护罩的侧壁内。
16.进一步地,回收管道上靠近清洁保护罩的一端内部安装有粪污绞碎装置。
17.进一步地,清洁保护罩内部固装有污水导流板,且所述污水导流板朝向回收管道倾斜布置。
18.进一步地,所述粪污识别系统包括深度摄像头及雷达,所述深度摄像头安装在车体顶端,所述雷达安装在车体的前端。
19.进一步地,所述车体包括主架体以及安装在主架体底端且两两相对布置的四个滚轮,所述驱动装置包括对应安装在相对布置的两个滚轮上的驱动电机以及对应安装在两个驱动电机上的电机驱动模块。
20.进一步地,机械臂的一端铰接有底座,所述底座转动安装在车体上,所述底座上安装有第一舵机及两个第二舵机,其中第一舵机控制底座转动,两个第二舵机对称布置在机械臂的两侧,控制机械臂动作。
21.进一步地,所述车体上还安装有音乐播放系统。
22.进一步地,车体上还安装有电池。
23.一种采用上述机器人的畜禽舍内粪污自动识别定点消杀方法,它包括如下步骤:
24.步骤一、将机器人置于待清洁的畜禽舍内,启动开关,粪污识别系统开始工作,机械臂回归到预定位置;
25.步骤二、按照实际要求,通过软件系统远程设定或者通过机器人自带触摸屏设定机器人行走的路线、清洁次数以及清理模式等信息;
26.步骤三、控制机器人开始按照预定路线行走、避障,检测污点;
27.步骤四、在检测到污点时,控制系统会计算出污点的具体位置并控制机械臂准确到达污点处,清洁保护罩将污点扣住,此时水泵控制系统启动,清水箱中的水经水泵加压后通过锥形喷嘴喷到污点上,废水以及污点沿墙面滑落到污水导流板上,依靠污水导流板的倾斜角以及污水箱前部的吸污泵将污水吸到粪污绞碎装置前,大块的污点经粪污绞碎装置绞碎以后通过机械臂内部回收管道回收到污水箱内;
28.步骤五、在清理完一处污点后,机械臂回到原定位置,自动巡检功能启动,继续巡检下一处,以此类推,直至整个路线全部走完、墙面全部检测完毕后停止运动;
29.步骤六、当清理完整个墙面时,深度摄像头将停止对墙体污点的扫描,并自动进入倾倒模式,机器人自主到达排污点,倾倒污水箱内的废水。
30.本发明与现有技术相比具有以下效果:
31.本技术的机器人与现有技术中只考虑清洗消毒的模式不同,能够实现污点的即清即收,实现无污染清理的效果。采用定点消杀的模式,有效节约资源,且通过设置清洗系统、
消毒系统及回收系统,使得整个清洗、消毒以及回收工作均在一个相对密闭的环境中进行,可以有效防止粪污在清洗过程中的细菌以及消毒液的挥发对整个畜禽舍环境的影响。采用粪污回收、污点清洗、污点消毒结合的方式,保证清洁彻底,且有效提高清洁效率。
32.本技术的机器人具有体积小、易操作、能耗低和无污染等特点。
附图说明
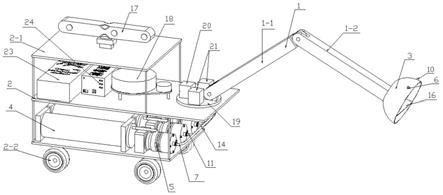
33.图1为本技术的立体结构示意图;
34.图2为本技术的主视示意图;
35.图3为本技术的右视示意图;
36.图4为清洁保护罩的内部结构示意图。
具体实施方式
37.具体实施方式一:结合图1~4说明本实施方式,一种具有回收功能的畜禽舍粪污自动识别定点消杀机器人,它包括行走装置、安装在行走装置上的控制系统、粪污识别系统、清洁系统、消毒系统、回收系统及机械臂1,
38.其中,所述行走装置包括车体2以及驱动车体2行走的驱动装置;
39.机械臂1的一端与车体2之间为转动连接,机械臂1的另一端固装有清洁保护罩3;
40.所述清洁系统包括清水箱4、连通固接在清水箱4一端的水泵5、安装在清洁保护罩3上的水喷头6以及连接在水喷头6与水泵5之间的第一连接管路7;
41.所述消毒系统包括消毒液箱8、连通固接在消毒液箱8一端的消毒液泵9、安装在清洁保护罩3上的消毒液喷头10以及连接在消毒液喷头10与消毒液泵9之间的第二连接管路11;
42.所述回收系统包括污水箱12、连通固接在污水箱12一端的吸污泵13以及两端分别与吸污泵13及清洁保护罩3连通的回收管道14;
43.所述粪污识别系统将采集到的信息以数据的形式传输给所述控制系统,通过控制系统控制行走装置、清洁系统、消毒系统、回收系统及机械臂1的动作。
44.机器人上设置有总开关,用于一键启动及关闭机器人。
45.清水通过水泵5以及水喷头6直接喷到污点表面,从而将污点清洁下来。水喷头6采用不锈钢实心锥形喷嘴,可以形成高压水柱将污点喷下。
46.消毒液通过消毒液泵9以及消毒液喷头10直接喷到污点表面,从而达到消毒墙面的效果。
47.消毒液喷头10采用不锈钢雾化喷嘴,而且位于较高位置,有助于扩大消毒面积且不会造成大量消毒液滞留在墙面的现象。
48.水喷头6与消毒液喷头10分别安装在清洁保护罩3的上部,清洁保护罩3呈碗状结构,水喷头6与消毒液喷头10关于清洁保护罩3中心轴线所在虚拟竖直平面对称布置,每个喷头与清洁保护罩3中心轴线所在虚拟竖直平面之间的夹角为45
°
。工作过程中,清洁保护罩3罩设在待清洁污点上,该污点位于清洁保护罩3的中心轴线位置,利用45
°
倾斜的喷头设置,有利于将污点全部准确的清洗且不会造成飞溅的现象。
49.机械臂1包括转动连接的主臂1
‑
1及副臂1
‑
2,根据机器人的高度以及离墙距离,设
计主臂1
‑
1为150mm~180mm,副臂1
‑
2为120mm~140mm。机械臂1采用自主设计、自主建造,主、副臂采用pla材料,该材料硬度好、强度高。
50.清洁保护罩3的末端设置有密封圈,该密封圈为橡胶材质,可以使清洁保护罩3贴紧整个墙面,不会造成废液和废气流出,从而保护畜禽舍内的整个环境。
51.回收管道14设计为圆形滑道,并且在内壁涂有氧化铝粉末喷雾造粒润滑剂,涂料厚为2mm~3mm。可以减少管道内部在清除粪污中产生开裂及散裂等损伤,还可以降低摩擦力,减少对管道内部的擦伤和磨耗。回收管道14的直径为40mm~50mm,长度为320mm~340mm。
52.通过设置吸污泵13,保证污水快速回收到污水箱12内。
53.控制系统主要是基于树莓派为基底而构建的,包括动力驱动系统、水泵5控制系统、机械臂1控制系统、音乐盒控制系统等构成。整个系统高度集成化,安装在控制盒24里。
54.位于控制盒里的动力驱动系统与底盘上的驱动电机连接,可以依据用户以及地形需要随时自动调整机器人底盘滚轮移动速度和方向;
55.位于控制盒里的水泵5控制系统与各个泵连接,可以依据需求调节泵电机的运转速率,从而控制喷头上的出水量/出液量以及出水速率/出液速率;
56.位于控制盒里的机械臂1控制系统与底座19上舵机连接,用于调节机械臂1的伸直与转向,主要依据雷达18与深度摄像头17计算出的污点位置控制机械臂1准确对准污点;
57.位于控制盒里的音乐盒控制系统与音乐盒连接,在工作时可以播放音乐,控制音量大小、播放暂停以及切歌的功能,提供给畜禽舍内一个舒适愉快地环境,有利于舍内畜禽的生长发育。
58.本技术的机器人与现有技术中只考虑清洗消毒的模式不同,能够实现污点的即清即收,实现无污染清理的效果。采用定点消杀的模式,有效节约资源,且通过设置清洗系统、消毒系统及回收系统,使得整个清洗、消毒以及回收工作均在一个相对密闭的环境中进行,可以有效防止粪污在清洗过程中的细菌以及消毒液的挥发对整个畜禽舍环境的影响。
59.本技术的机器人具有体积小、易操作、损耗低和无污染等特点。
60.本技术的机器人有多种清理模式,系统设有清污式、消毒模式、接污模式,每种模式还分为强、中、弱三挡。用户可以根据需要自主选择任一模式或者多种模式相结合的清理模式。
61.本技术的机器人能够通过电脑或手机远程控制并监控清洁过程。
62.所述回收管道14、所述第一连接管路7及所述第二连接管路11均埋设在机械臂1内,第一连接管路7上靠近水喷头6的一端部及第二连接管路11上靠近消毒液喷头10的一端部均埋设在清洁保护罩3的侧壁内。机械臂1采用空心结构设计,回收管道14位于机械臂1内部,保证异味不会散发污染环境。最大程度阻止污水的对畜禽生活环境的影响。
63.回收管道14上靠近清洁保护罩3的一端内部安装有粪污绞碎装置15。在始端装有粪污绞碎装置15,保证回收管道14的通畅。
64.清洁保护罩3内部固装有污水导流板16,且所述污水导流板16朝向回收管道14倾斜布置。污水导流板16与清洁保护罩3之间优选为密封连接,防止污水及消毒液通过污水导流板16与清洁保护罩3之间的缝隙流出。污水导流板16倾斜布置,有利于粪污流向回收管道14。污水导流板16表面涂有润滑剂,可以保证流下的污水可以完全通过管道流回污水箱12
内。污水导流板16的厚度为2mm~4mm的不锈钢材料。当清洁保护罩3扣在污点外时,清洁保护罩3与墙体紧密贴合,此时污水导流板16与水平面之间的夹角优选为25
°
,使得粪污的流速不会过快或过慢。
65.所述粪污识别系统包括深度摄像头17及雷达18,所述深度摄像头17安装在车体2顶端,所述雷达18安装在车体2的前端。车体2中的主架体包括上、中、下三层结构,尝试摄像机位于上层,雷达18位于中层,清水箱4、消毒液箱8及污水箱12均布置在下层。通过雷达18可以完全探测到前方的实时环境。并将数据传输给控制系统。深度摄像头17朝向机器人前进方向的右侧布置。考虑到畜禽舍内阴暗的环境,雷达18和深度摄像头17同时检测整个环境。本技术的粪污识别系统结合了雷达18探测与深度摄像头17检测的优点,具有比单纯的雷达18检测或单纯的深度摄像头17检测更快的检测速率和更精确的检测效果。这样布局不仅是视野宽阔,还可以快速、准确的探测到右面墙壁的粪污等污点,并可识别出粪污的大小,将其换算成控制系统可以接收的数据,供控制系统计算出给水量,节约水资源。
66.所述车体2包括主架体以及安装在主架体底端且两两相对布置的四个滚轮,所述驱动装置包括对应安装在相对布置的两个滚轮上的驱动电机以及对应安装在两个驱动电机上的电机驱动模块。如此设计,通过驱动电机带动滚轮转动,以实现整个车体2的移动,驱动电机优选安装在位于机器人后侧的两个滚轮上。电机驱动模块采用分立元件设计,可以控制驱动电机的方向和速度,可以在机器人遇到障碍时调整角速度和线速度,防止因速度过快而不能及时避障。车架体优选防潮湿的不锈钢材质,以适应畜禽舍内潮湿阴暗及存在下水口的环境,保证车架体不受腐蚀。滚轮的结构尺寸为:直径为200mm~220mm,宽为130mm~140mm;橡胶胎厚为70mm~80mm的款型轮胎。驱动装置与控制系统电性连接,并受控制系统控制。
67.机械臂1的一端铰接有底座19,所述底座19转动安装在车体2上,所述底座19上安装有第一舵机20及两个第二舵机21,其中第一舵机20控制底座19转动,两个第二舵机21对称布置在机械臂1的两侧,控制机械臂1动作。通过设置两个第二舵机21,使受力更均匀。每个舵机均对应安装在舵机盒内。
68.所述车体2上还安装有音乐播放系统。所述音乐播放系统具有蓝牙、wifi功能,还内置有内存卡。手机用户可通过蓝牙或者wifi与音乐播放系统连接,实现远程控制,用户可根据实际需要调节音乐音量大小、播放曲目以及播放、暂停等功能。用户也可以提前将音乐下载到内存卡内,也可通过wifi网上下载。音乐盒是单独与电池23连接的,可以在机器人工作中播放音乐,也可以在关机状态下只运行音乐播放系统。畜禽是完整的生命体,具有感知舒服、快乐的能力,适宜的音乐对畜禽的繁殖、生长发育和抑制应激均有良好的积极影响,促进生产和增加效益。
69.车体2上还安装有电池23。通过电池23为整个机器人供电,保证各系统工作稳定。
70.一种采用上述机器人的畜禽舍内粪污自动识别定点消杀方法,它包括如下步骤:
71.步骤一、将机器人置于待清洁的畜禽舍内,启动开关,粪污识别系统开始工作,机械臂1回归到预定位置;
72.步骤二、按照实际要求,通过软件系统远程设定或者通过机器人自带触摸屏设定机器人行走的路线、清洁次数以及清理模式等信息;
73.步骤三、控制机器人开始按照预定路线行走、避障,检测污点;通过控制端的控制
按钮进行操作。
74.步骤四、在检测到污点时,控制系统会计算出污点的具体位置并控制机械臂1准确到达污点处,清洁保护罩3将污点扣住,此时水泵5控制系统启动,清水箱4中的水经水泵5加压后通过锥形喷嘴喷到污点上,废水以及污点沿墙面滑落到污水导流板16上,依靠污水导流板16的倾斜角以及污水箱12前部的吸污泵13将污水吸到粪污绞碎装置15前,大块的污点经粪污绞碎装置15绞碎以后通过机械臂1内部回收管道14回收到污水箱12内;
75.步骤五、在清理完一处污点后,机械臂1回到原定位置,自动巡检功能启动,继续巡检下一处,以此类推,直至整个路线全部走完、墙面全部检测完毕后停止运动;
76.步骤六、当清理完整个墙面时,深度摄像头17将停止对墙体污点的扫描,并自动进入倾倒模式,机器人自主到达排污点,倾倒污水箱12内的废水。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1