一种奶牛智能化饲养系统的制作方法
1.本技术涉及奶牛养殖领域,尤其涉及一种奶牛智能化饲养系统。
背景技术:
2.在一些大型养殖场中,奶牛在各个功能区行走转移时,都需要相应的人员进行吆喝驱赶,容易出现奶牛情绪不稳定的情况,不利于产奶量和奶品质的提高。并且,针对每头牛而言,无法科学精准的进行饲喂,休息和挤奶,不利于奶牛的身心健康,同时,人工成本高,养殖精确度较低。
技术实现要素:
3.本技术提供了一种奶牛智能化饲养系统,解决了现有技术中奶牛在各个功能区行走时,需要人员吆喝驱赶导致的奶牛情绪不稳定,影响产奶量和奶品质以及人工成本高,养殖精确度低的问题。
4.为解决上述技术问题,本技术提供了一种奶牛智能化饲养系统,包括:
5.智能饲喂机组、饲喂区,休息区,挤奶区和操作区;
6.所述饲喂区的一端两侧分别设置有计重料仓和搅拌机,所述饲喂区的中间位置处设置有布料通道,所述布料通道的两侧设置有饲喂通槽,所述布料通道中设置有饲料混合搅拌机,所述布料通道上方设置有导轨,所述饲料混合搅拌机上的角度传感器位于所述导轨内,所述饲喂通槽的两边均设置有第一牛站道,各所述第一牛站道上均设置有第一刮粪机;
7.所述休息区和所述操作区均位于所述饲喂区的两侧位置处,所述休息区和所述饲喂区之间的隔墙上设置有多个第一单向门,所述休息区中设置有牛卧床和第二牛站道,所述第二牛站道上设置有第二刮粪机,所述第二刮粪机和所述第一刮粪机联动连接;所述第一刮粪机和所述第二刮粪机分别通过设置于所述第一牛站道和所述第二牛站道上的牵引铁链和设置于所述饲喂区一端的链轮配合带动,所述休息区内设置有引导通道,各所述引导通道之间均设置有导向门;
8.所述挤奶区位于所述操作区的两侧位置处,所述挤奶区中设置有挤奶机,所述操作区中设置有医疗设置,所述挤奶区和所述休息区之间的隔墙上设置有多个第一分割门,所述挤奶区和所述操作区之间设置有多个导向通道,各所述导向通道的隔墙之间、所述导向通道和所述挤奶区的隔墙之间、所述导向通道和所述操作区的隔墙之间均设置有多个第二分割门,所述操作区和所述饲喂区的隔墙之间,所述导向通道和所述饲喂区的隔墙之间均设置有多个第二单向门;
9.所述导向门,所述第一分割门,所述第二分割门上均设置有与奶牛脖颈处的标识码对应的扫码器。
10.优选地,所述牛卧床上还铺设有锯木屑。
11.优选地,所述第一牛站道、第二牛站道上还铺设有耐磨橡胶板。
12.相比于现有技术,本技术所提供的一种奶牛智能化饲养系统,可以根据生产及奶牛的生活需要,引导奶牛完成整天的所有活动。少了人为吆喝与驱赶的惊吓,奶牛情绪稳定,有利于提高产奶量与奶的品质。能够针对每头牛,科学精准地设定饲喂,休息以及挤奶时间,采食量等参数,有利于奶牛的身心健康,避免了肥胖,过着规律而悠闲的生活。除了操作区内的医疗、配种等工作,全程智能化无人操作,节省了人工成本,提高了工作精确度。奶牛在本系统的识别指引下,养成习惯,自动完成饲喂、休息、挤奶、被操作等活动。能够营养均衡适时,在干净卫生的环境中生产和生活。
附图说明
13.为了更清楚的说明本技术的技术方案,下面将对实施例中所需要使用的附图作简要的介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性的前提下,还可以根据这些附图获得其他的附图。
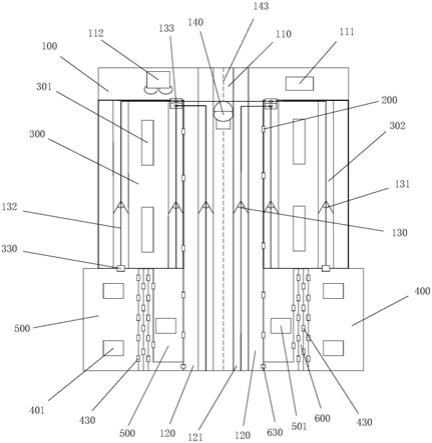
14.图1为本实用新型实施例所提供的一种奶牛智能化饲养系统结构示意图;
15.图2为本实用新型实施例所提供的一种饲料混合搅拌机结构示意图。
16.图中,100饲喂区,200单向门,300休息区,400挤奶区,500操作区,600导向通道,110布料通道,111计重料仓,112搅拌机,120饲喂通槽,140饲料混合搅拌机,141出料门,142布料皮带机,143导轨,144角度传感器,145车轮,121第一牛站道,130第一刮粪机,131第二刮粪机,132牵引铁链,133链轮,301牛卧床,302第二牛站道,401挤奶机,501医疗设置,330第一分割门,430第二分割门,630第二单向门。
具体实施方式
17.为了使本技术领域的人员更好地理解本技术中的技术方案,下面将结合附图,对本技术实施例中的技术方案进行清楚完整的描述。
18.本技术的核心是提供一种奶牛智能化饲养系统,可以解决现有技术中奶牛在各个功能区行走时,需要人员吆喝驱赶导致的奶牛情绪不稳定,影响产奶量和奶品质以及人工成本高,养殖精确度低的问题。
19.图1为本实用新型实施例所提供的一种奶牛智能化饲养系统结构示意图,图2为本实用新型实施例所提供的一种饲料混合搅拌机结构示意图,如图1至图2所示,该系统包括:
20.饲喂区100,休息区300,挤奶区400和操作区500;
21.饲喂区100的一端两侧分别设置有计重料仓111和搅拌机112,饲喂区100的中间位置处设置有布料通道110,布料通道110的两侧设置有饲喂通槽120,布料通道110中设置有饲料混合搅拌机140,布料通道110上方设置有导轨143,饲料混合搅拌机140上的角度传感器144位于导轨143内,饲喂通槽120的两边均设置有第一牛站道121,各第一牛站道121上均设置有第一刮粪机130;
22.休息区300和操作区500均位于饲喂区100的两侧位置处,休息区300和饲喂区100之间的隔墙上设置有多个第一单向门200,休息300区中设置有牛卧床301和第二牛站道302,第二牛站道302上设置有第二刮粪机131,第二刮粪机131和第一刮粪机130联动连接;第一刮粪机130和第二刮粪机131分别通过设置于第一牛站道121和第二牛站道302上的牵引铁链132和设置于饲喂区100一端的链轮133配合带动,休息区300内设置有引导通道,各
引导通道之间均设置有导向门;
23.挤奶区400位于操作区500的两侧位置处,挤奶区400中设置有挤奶机401,操作区500中设置有医疗设置501,挤奶区400和休息区300之间的隔墙上设置有多个第一分割门330,挤奶区400和操作区500之间设置有多个导向通道600,各导向通道600的隔墙之间、导向通道600和挤奶区400的隔墙之间、导向通道600和操作区500的隔墙之间均设置有多个第二分割门430,操作区500和饲喂区100的隔墙之间,导向通道600和饲喂区100之间的隔墙之间均设置有第二单向门630;
24.导向门,第一分割门330,第二分割门430上均设置有与奶牛脖颈处的标识码对应的扫码器。
25.具体地,在实际使用过程中,奶牛还不适应,前期需要相应的人员引导奶牛沿着该系统的各功能区转移一段时间,熟悉后奶牛会自己行走。奶牛在饲喂区100吃饱后,自己经过第一单向门200进入休息区300休息。奶牛感觉想吃料的时候,先要去挤奶区400内进行挤奶。在进入第一分割门330时,系统自动识别其状态,进入挤奶区400挤奶。如果还不到挤奶的时候,第一分割门330会通过引导通道将其导入回休息区300。挤奶后,奶牛进入第二分割门430,系统识别后,进入饲喂区100吃料,如果还没有挤奶,通过导向通道600和第二分割门430之间的配合会将奶牛导入挤奶区400。如果发现奶牛有病或者需要接种等工作,系统会将奶牛通过导向通道600和第二分割门430经挤奶区400导入操作区500,在操作区500内操作结束后,自行打开第二单向门630进入饲喂区100。饲喂区100,包括料场区,饲喂通槽120,第一刮粪机130和饲料混合搅拌机140。料场区内分能量类和饲料类,分别盛装在计重料仓111和搅拌机112内,搅拌机112根据系统指令移动到计重料仓111处,将计重料仓111内的相应饲料通过搅拌机112搅拌均匀后,按时输送至智能饲料混合搅拌机140中。在饲喂通槽120的两边是通长的第一牛站道121。作为优选地实施方式,在第一牛站道121的地面上还铺设有耐磨的橡胶板。在第一牛站道121上还配备有第一刮粪机130。第一刮粪机130和第二刮粪机131均包括刮板,在第一刮粪机130和第二刮粪机131上均有牵引铁链132,通过牵引铁链132将第一刮粪机130和第二刮粪机131联动连接,在饲喂区100与休息区300形成封闭的环形。牵引铁链132设置在饲喂区100的一端,与驱动的链轮133咬合,在链轮133的带动下,牵引第一刮粪机130和第二刮粪机131往复运动。链轮133两边有气缸,给链轮133提供张紧力。第一刮粪机130和第二刮粪机131上有摆动的活动板,能够在第一刮粪机130和第二刮粪机131正向运动时,活动板借助重力关闭,第一刮粪机130和第二刮粪机131正常工作。第一刮粪机130和第二刮粪机131反向工作时,活动板在牛粪的作用下向上摆动,牛粪通过第一刮粪机130或第二刮粪机131,不至于被反向刮回来。第一刮粪机130和第二刮粪机131高度较小,行走速度慢。遇到奶牛时,奶牛会自动跨过去。如果碰到奶牛的腿,第一刮粪机130和第二刮粪机131会感觉到(在刮粪机上设置有感应器),立刻停下来,后退进行避让,保证奶牛的安全。智能饲料混合搅拌机140能够在系统设定的时间自动启动,接受来自料场的全部饲料,搅拌均匀后,进入布料通道110,打开出料门141和布料皮带机142布料。在布料通道110的上方有导轨143,设置在智能饲料混合搅拌机140上的角度传感器144沿着导轨143移动,根据角度传感器144偏差,纠正车轮145的方向,实现自动纠偏的作用。走完布料通道110,智能饲料混合搅拌机140内的饲料刚好用完铺到饲喂通槽120内,之后回到料场指定的位置站定。
26.第一单向门200和第二单向门630,不用识别,其门板倾斜安装,根据自重实现自动关门。由于门框的作用,门板只能单向打开。第一分割门330,第二分割门430上均设置有与奶牛脖颈处的标识码对应的扫码器,扫码器可以设置在相应的门框上,可以识别每一头奶牛上的标识码,根据每个奶牛的信息,打开相应的门,引导其进入相应的功能区。
27.休息区300中设置有牛卧床301和第二牛站道302。为了不影响牛粪循环系统工作,优选地,可以在牛卧床301上铺垫锯木屑垫料。在第二牛站道302上有第二刮粪机131,与第一牛站道121上的第一刮粪机130组合成闭环工作。挤奶区400内有挤奶机401,自动挤奶。操作区500内设置有医疗、配种、修蹄等设施,是专门为牛的接种、医疗等工作设置的特定区域。休息区300与操作区500是不通的。奶牛在整个行走过程中是形成单向循环的,但是,第一分割门330和第二分割门430是双向开的。
28.在实际使用时,第一步,奶牛在饲喂区吃饱后,走动到单向门处,自行打开单向门,进入到休息区进行休息;
29.第二步:奶牛从休息区起身后,通过导向门上的扫码器扫描标识码以获取目标信息,并根据目标信息判断奶牛是否达到挤奶要求;
30.如果达到挤奶要求,则进入第三步;如果未达到挤奶要求,则进入第三步;
31.第三步:通过导向门和引导通道之间的配合将奶牛引导至第一分割门,并通过第一分割门上的扫码器扫描识别标识码后打开第一分割门使奶牛进入挤奶区进行挤奶;
32.第四步:当奶牛行走至挤奶区和操作区之间的导向通道与挤奶区之间的第二分割门时,通过第二分割门上的扫码器扫描识别标识码以获取挤奶信息,并根据挤奶信息判断奶牛是否已经挤奶;
33.如果已经挤奶,则进入第五步,如果没有挤奶,则进入步骤第三步;
34.步骤第五步:通过挤奶区的导向通道将奶牛引导至第二分割门,并通过所述第二分割门上的扫码器扫描识别所述标识码后打开所述第二分割门使奶牛进入操作区;
35.步骤第六步:经过操作区处理后,奶牛走向第二单向门,自动打开单向门,进入饲喂区;
36.步骤第七步:通过导向门和引导通道之间的配合将奶牛再次引导至休息区进行休息。
37.本技术所提供的一种奶牛智能化饲养系统,可以根据生产及奶牛的生活需要,引导奶牛完成整天的所有活动。少了人为吆喝与驱赶的惊吓,奶牛情绪稳定,有利于提高产奶量与奶的品质。能够针对每头牛,科学精准地设定饲喂,休息以及挤奶时间,采食量等参数,有利于奶牛的身心健康,避免了肥胖,过着规律而悠闲的生活。除了操作区内的医疗、配种等工作,全程智能化无人操作,节省了人工成本,提高了工作精确度。奶牛在本系统的识别指引下,养成习惯,自动完成饲喂、休息、挤奶、被操作等活动。能够营养均衡适时,在干净卫生的环境中生产和生活。
38.本领域技术人员在考虑说明书及实践这里公开的申请后,将容易想到本技术的其他实施方案。本技术旨在涵盖本技术的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本技术的一般性原理并包含本技术公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为实例性的,本技术的真正范围由权利要求指出。
39.应当理解的是,本技术并不局限于上面已经描述并在附图中示出的精确结构,并
且可以在不脱离其范围进行各种修改和改变。以上所述的本技术实施方式并不构成对本技术保护范围的限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1