一种无人驾驶田园管理机的制作方法
1.本发明涉及农业机械领域,尤其涉及一种无人驾驶田园管理机。
背景技术:
2.微型耕耘机是指功率≤7.5kw,可直接用驱动轮轴驱动旋转工作部件,主要用于水田旱田耕整、田园管理和设施农业等耕耘作业为主的机动微型耕耘机,又称为田园管理机、耕耘机、管理机和园艺机等。若更换安装其他配套机具,还可进行犁耕、播种、抽水、喷药、覆膜、碎草、开沟和覆土等多种作业,甚至还可用作短途运输和小型移动发电设备动力源。由于其具有结构紧凑、体积小和质量小等特点,因而广泛应用于山地、丘陵,以及温室大棚、果(茶)园等环境的耕地机械作业。
3.现有履带式田园管理机具有作业平稳、可广泛应用于山地、丘陵和果园等复杂地形等特点,由于山地平整度差,驾驶田园管理机颠簸严重,驾驶者长时间耕作劳动强度大,长时间颠簸震荡也会对身体产生不利影响;而且由于山地、丘陵和果园中土壤中杂质较多,使用一段时间后履带上会粘附大量杂质和泥土,需要清理干净后才能作业,大大降低了田园管理机的使用效率。
技术实现要素:
4.为克服现有技术中存在的田园管理机耕作劳动强度大、对身体产生不利影响、使用效率低等一系列问题,本发明提供了一种无人驾驶田园管理机,包括机架、旋耕主体和摄像头组件,所述旋耕主体安装在所述机架下方;所述摄像头组件安装在所述机架上方,所述摄像头组件包括摄像头架体、摄像头支杆、用于控制摄像头支杆沿水平方向旋转的水平驱动组件和用于控制摄像头支杆沿竖直方向旋转的竖直驱动组件,所述摄像头架体固定安装在所述机架上方前端,所述水平驱动组件固定安装在所述摄像头架体上,所述竖直驱动组件固定安装在所述水平驱动组件上,所述摄像头支杆一端安装在所述竖直驱动组件输出端。
5.在田园管理机上安装摄像头组件来替代驾驶员,并通过远程控制来实现对田园管理机的控制,达到无人驾驶的目的。
6.优选地,所述水平驱动组件包括机座、电机、主动轮、被动轮和水平驱动杆,所述机座固定安装在所述摄像头架体上,所述电机固定安装在所述机座上,所述电机旋转轴可旋转地安装在所述摄像头架体上,所述主动轮固定安装在所述电机旋转轴上,所述被动轮与所述主动轮齿合,所述水平驱动杆固定安装在所述被动轮上,所述摄像头支杆下侧安装在所述水平驱动杆顶端。
7.优选地,所述水平驱动杆顶端通过第一安装轴安装在所述摄像头支杆下侧。
8.优选地,所述竖直驱动组件包括安装座和竖直驱动气缸,所述安装座固定安装在所述水平驱动杆一侧,所述竖直驱动气缸一端通过第二安装轴安装在所述安装座上,另一端通过第三安装轴安装在所述摄像头支杆上远离摄像头一端。
9.优选地,所述水平驱动杆顶端为弧形面,所述摄像头支杆下侧与所述水平驱动杆顶端对应位置处为与所述弧形面贴合的弧形凹槽;所述摄像头支杆下侧还固定有用于安装所述第一安装轴的固定块;所述第一安装轴穿过所述固定块和所述水平驱动杆顶端将所述水平驱动杆顶端安装在所述固定块上;所述第一安装轴轴线方向与所述摄像头支杆长度方向垂直。
10.利用水平驱动组件控制摄像头支杆水平摆动,竖直驱动组件控制摄像头支杆调整仰视或俯视角度,从而实现对摄像头视角的调整。
11.优选地,还包括变速箱、发动机、启动器和把手,所述变速箱、所述发动机安装在所述机架上方,所述启动器安装在所述发动机上,所述把手安装在所述机架后端上方位置处,所述旋耕主体包括旋耕轴、旋耕刀组件、第一伞状齿轮、第二伞状齿轮和齿轮传动轴,所述齿轮传动轴由旋转电机驱动,所述第一伞状齿轮固定安装在所述齿轮传动轴上且与所述第二伞状齿轮齿合,所述第二伞状齿轮固定安装在所述旋耕轴上,所述旋耕刀组件沿旋耕轴长度方向均匀分布在所述旋耕轴上。
12.采用伞状齿轮传动控制旋耕刀组件,并配合履带行走组件在多地形环境行走,使得耕作更为稳定且田园管理机受地形影响小,耕作效果好。
13.优选地,所述旋耕刀组件包括两个交叉成十字型的弧形耕刀,每个所述弧形耕刀宽度为6~15cm,其长度方向轨迹中任意一点m(x,y)满足如下公式:
[0014][0015]
其中,r0为弧形耕刀的旋转半径,且满足r0=[30cm,60cm],r0为旋转耕刀翻土部的半径,且满足r0=[5cm,10cm],k为常量且满足k=[0.5,2]。
[0016]
优选地,所述弧形耕刀的旋转半径r0与旋转耕刀翻土部的半径r0之间满足如下公式:r0=[3r0,6r0],且弧形耕刀宽度大于其翻土半径r0。
[0017]
优选地,所述旋耕刀组件以所述齿轮传动轴中心轴为对称轴在所述旋耕轴上呈对称分布。且每侧设置三组所述旋耕刀组件。其中远离所述齿轮传动轴一端的两组所述旋耕刀组件的所述弧形耕刀的翻土部均向所述齿轮传动轴一端弯曲;靠近所述齿轮传动轴一端的一组所述旋耕刀组件的所述弧形耕刀的翻土部向左右相反方向弯曲。
[0018]
优选地,所述履带行走组件包括履带、安装在所述履带内部的两个行走轮,所述履带内部位于两个所述行走轮中间位置处设有用于自动调节履带张力的履带张紧轮系。在两个行走轮中间设置履带张紧轮系,使得履带在不同地形环境中行驶时均可保持稳定的张力,使得田园管理机在不同地形中的行走更平稳,同时也由于履带一直处于稳定张力状态,对其表面泥土的清理也更为容易。
[0019]
优选地,所述履带张紧轮系包括张紧支撑辊、位于所述张紧支撑辊正上方的上张紧辊、位于所述张紧支撑辊下方的第一下张紧辊和第二下张紧辊,所述张紧支撑辊中心轴与两个所述行走轮中心轴处于同一水平面上且所述张紧支撑辊两端通过张紧安装杆固定安装在两个所述行走轮两端;所述上张紧辊、所述第一下张紧辊和所述第二下张紧辊表面顶抵在所述履带内且通过伸缩杆安装在所述张紧支撑辊上。
[0020]
优选地,所述伸缩杆外套有伸缩弹簧,所述伸缩弹簧一端固定安装在所述上张紧辊、第一下张紧辊或第二下张紧辊上,另一端固定安装在所述张紧支撑辊上。
[0021]
优选地,用于安装所述上张紧辊的所述伸缩杆固定安装在所述张紧支撑辊上;用于安装所述第一下张紧支撑辊和第二下张紧支撑辊的所述伸缩杆可旋转地安装在所述张紧支撑辊上,且所述第一下张紧支撑辊和所述第二下张紧支撑辊之间通过伸缩杆连接。
[0022]
优选地,位于所述第一下张紧支撑辊和所述第二下张紧支撑辊之间伸缩杆外套设有伸缩弹簧,其一端固定安装在所述第一下张紧支撑辊上,另一端固定安装在所述第二下张紧支撑辊上。
[0023]
采用上张紧支撑辊、第一下张紧支撑辊和第二下张紧支撑辊配合顶抵在履带内,根据地形和土质的变化,利用伸缩弹簧对这三个支撑辊施加稳定力的作用,使履带一直保持稳定的张力,从而确保田园管理机可以在不同地形上保持稳定的行驶。
[0024]
田园管理机上还设有田园管理机控制系统,通过智能终端控制田园管理机控制系统,以实现控制摄像头组件拍摄、田园管理机耕作等活动。在田园管理机上安装摄像头组件来替代驾驶员,并通过远程控制来实现对田园管理机的控制,达到无人驾驶的目的。
[0025]
优选地,所述履带行走组件还包括挡泥板,所述挡泥板安装在所述履带与所述旋转耕刀中间。
[0026]
优选地,所述挡泥板为弧形,其一端固定安装在所述机架上,另一端为自由端,且其高度低于所述主行走轮轴心;所述挡泥板内侧与所述履带外侧形成刮泥区域。
[0027]
在履带外侧安装挡泥板,可将履带外侧的泥土和杂质从履带上刮下,减少了泥土和杂质在履带上的附着,提高了田园管理机的工作效率,降低了劳动强度。
[0028]
优选地,所述挡泥板内侧形成有刮刀,所述刮刀下表面从所述挡泥板到所述履带方向为向下倾斜的斜面,且所述刮刀顶部与所述履带外侧的距离为0.5~2cm。
[0029]
在挡泥板内侧设置刮刀,刮刀顶端靠近履带,将履带上的泥土和杂质刮下,从而减少了泥土等对履带的负重。
[0030]
优选地,所述挡泥板内侧位于所述刮刀下方位置处安装有刮泥辊轮,所述刮泥辊轮表面与所述履带外侧之间的距离为0.1~0.5cm。
[0031]
由于刮刀在刮泥实践中会存在刮泥量过大时堵塞的问题,这里采用两级刮泥,通过刮泥辊轮将履带中绝大部分泥土刮下,使得在刮刀刮泥时履带上附着的数量较少,从而降低了刮刀刮泥的强度。
[0032]
与现有技术相比,本发明的有益效果是:
[0033]
(1)在田园管理机上安装摄像头组件来替代驾驶员,并通过远程控制来实现对田园管理机的控制,达到无人驾驶的目的。
[0034]
(2)利用水平驱动组件控制摄像头支杆水平摆动,竖直驱动组件控制摄像头支杆调整仰视或俯视角度,从而实现对摄像头视角的调整。
[0035]
(3)采用伞状齿轮传动控制旋耕刀组件,并配合履带行走组件在多地形环境行走,使得耕作更为稳定且田园管理机受地形影响小,耕作效果好。
附图说明
[0036]
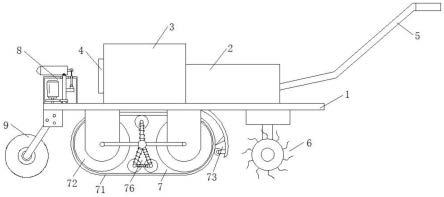
图1是本发明较佳之田园管理机结构图;
[0037]
图2是本发明较佳之摄像头组件结构图;
[0038]
图3是本发明较佳之第一安装轴结构图;
[0039]
图4是本发明较佳之旋耕主体结构图;
[0040]
图5是本发明较佳之弧形耕刀轨迹图;
[0041]
图6是本发明较佳之履带行走组件结构图。
具体实施方式
[0042]
以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0043]
如图1-6所示,无人驾驶田园管理机包括机架1、旋耕主体6和摄像头组件8,所述旋耕主体6安装在所述机架1下方;所述摄像头组件8安装在所述机架1上方,所述摄像头组件8包括摄像头架体81、摄像头支杆82、用于控制摄像头支杆82沿水平方向旋转的水平驱动组件83和用于控制摄像头支杆82沿竖直方向旋转的竖直驱动组件84,所述摄像头架体81固定安装在所述机架1上方前端,所述水平驱动组件83固定安装在所述摄像头架体81上,所述竖直驱动组件84固定安装在所述水平驱动组件83上,所述摄像头支杆82一端安装在所述竖直驱动组件84输出端。
[0044]
在田园管理机上安装摄像头组件来替代驾驶员,并通过远程控制来实现对田园管理机的控制,达到无人驾驶的目的。
[0045]
作为一种优选的实施方式,水平驱动组件83包括机座831、电机832、主动轮833、被动轮834和水平驱动杆835,所述机座831固定安装在所述摄像头架体81上,所述电机832固定安装在所述机座831上,所述电机832旋转轴可旋转地安装在所述摄像头架体81上,所述主动轮833固定安装在所述电机832旋转轴上,所述被动轮834与所述主动轮833齿合,所述水平驱动杆835固定安装在所述被动轮834上,所述摄像头支杆82下侧安装在所述水平驱动杆835顶端。
[0046]
作为一种优选的实施方式,水平驱动杆835顶端通过第一安装轴836安装在所述摄像头支杆82下侧。
[0047]
作为一种优选的实施方式,所述竖直驱动组件84包括安装座841和竖直驱动气缸842,所述安装座841固定安装在所述水平驱动杆83一侧,所述竖直驱动气缸842一端通过第二安装轴843安装在所述安装座841上,另一端通过第三安装轴844安装在所述摄像头支杆82上远离摄像头一端。
[0048]
作为一种优选的实施方式,所述水平驱动杆835顶端为弧形面,所述摄像头支杆82下侧与所述水平驱动杆835顶端对应位置处为与所述弧形面贴合的弧形凹槽;所述摄像头支杆82下侧还固定有用于安装所述第一安装轴836的固定块821;所述第一安装轴836穿过所述固定块821和所述水平驱动杆835顶端将所述水平驱动杆835顶端安装在所述固定块821上;所述第一安装轴836轴线方向与所述摄像头支杆82长度方向垂直。
[0049]
利用水平驱动组件控制摄像头支杆水平摆动,竖直驱动组件控制摄像头支杆调整仰视或俯视角度,从而实现对摄像头视角的调整。
[0050]
作为一种优选的实施方式,还包括变速箱2、发动机3、启动器4和把手1,所述变速箱2、所述发动机3安装在所述机架1上方,所述启动器4安装在所述发动机3上,所述把手1安
装在所述机架1后端上方位置处,所述旋耕主体6包括旋耕轴61、旋耕刀组件62、第一伞状齿轮63、第二伞状齿轮64和齿轮传动轴65,所述齿轮传动轴65由旋转电机驱动,所述第一伞状齿轮固定安装在所述齿轮传动轴上且与所述第二伞状齿轮齿合,所述第二伞状齿轮固定安装在所述旋耕轴上,所述旋耕刀组件沿旋耕轴长度方向均匀分布在所述旋耕轴上。
[0051]
采用伞状齿轮传动控制旋耕刀组件,并配合履带行走组件在多地形环境行走,使得耕作更为稳定且田园管理机受地形影响小,耕作效果好。
[0052]
作为一种优选的实施方式,所述旋耕刀组件62包括两个交叉成十字型的弧形耕刀,每个所述弧形耕刀宽度为6~15cm,其长度方向轨迹中任意一点m(x,y)满足如下公式:
[0053][0054]
其中,r0为弧形耕刀的旋转半径,且满足r0=[30cm,60cm],r0为旋转耕刀翻土部的半径,且满足r0=[5cm,10cm],k为常量且满足k=[0.5,2]。
[0055]
作为一种优选的实施方式,所述弧形耕刀的旋转半径r0与旋转耕刀翻土部的半径r0之间满足如下公式:r0=[3r0,6r0],且弧形耕刀宽度大于其翻土半径r0。
[0056]
作为一种优选的实施方式,所述旋耕刀组件以所述齿轮传动轴中心轴为对称轴在所述旋耕轴上呈对称分布。且每侧设置三组所述旋耕刀组件。其中远离所述齿轮传动轴一端的两组所述旋耕刀组件的所述弧形耕刀的翻土部均向所述齿轮传动轴一端弯曲;靠近所述齿轮传动轴一端的一组所述旋耕刀组件的所述弧形耕刀的翻土部向左右相反方向弯曲。
[0057]
作为一种优选的实施方式,所述履带行走组件7包括履带71、安装在所述履带71内部的两个行走轮72,所述履带70内部位于两个所述行走轮72中间位置处设有用于自动调节履带张力的履带张紧轮系76。在两个行走轮中间设置履带张紧轮系,使得履带在不同地形环境中行驶时均可保持稳定的张力,使得田园管理机在不同地形中的行走更平稳,同时也由于履带一直处于稳定张力状态,对其表面泥土的清理也更为容易。
[0058]
作为一种优选的实施方式,所述履带张紧轮系76包括张紧支撑辊761、位于所述张紧支撑辊761正上方的上张紧辊762、位于所述张紧支撑辊下方的第一下张紧辊763和第二下张紧辊764,所述张紧支撑辊中心轴与两个所述行走轮中心轴处于同一水平面上且所述张紧支撑辊两端通过张紧安装杆765固定安装在两个所述行走轮两端;所述上张紧辊、所述第一下张紧辊和所述第二下张紧辊表面顶抵在所述履带内且通过伸缩杆766安装在所述张紧支撑辊上。
[0059]
作为一种优选的实施方式,所述伸缩杆766外套有伸缩弹簧767,所述伸缩弹簧一端固定安装在所述上张紧辊、第一下张紧辊或第二下张紧辊上,另一端固定安装在所述张紧支撑辊上。
[0060]
作为一种优选的实施方式,用于安装所述上张紧辊的所述伸缩杆固定安装在所述张紧支撑辊上;用于安装所述第一下张紧支撑辊和第二下张紧支撑辊的所述伸缩杆可旋转地安装在所述张紧支撑辊上,且所述第一下张紧支撑辊和所述第二下张紧支撑辊之间通过伸缩杆连接。
[0061]
作为一种优选的实施方式,位于所述第一下张紧支撑辊和所述第二下张紧支撑辊
之间伸缩杆外套设有伸缩弹簧,其一端固定安装在所述第一下张紧支撑辊上,另一端固定安装在所述第二下张紧支撑辊上。
[0062]
采用上张紧支撑辊、第一下张紧支撑辊和第二下张紧支撑辊配合顶抵在履带内,根据地形和土质的变化,利用伸缩弹簧对这三个支撑辊施加稳定力的作用,使履带一直保持稳定的张力,从而确保田园管理机可以在不同地形上保持稳定的行驶。
[0063]
田园管理机上还设有田园管理机控制系统,通过智能终端控制田园管理机控制系统,以实现控制摄像头组件拍摄、田园管理机耕作等活动。在田园管理机上安装摄像头组件来替代驾驶员,并通过远程控制来实现对田园管理机的控制,达到无人驾驶的目的。
[0064]
作为一种优选的实施方式,所述履带行走组件7还包括挡泥板73,所述挡泥板安装在所述履带与所述旋转耕刀中间。
[0065]
作为一种优选的实施方式,所述挡泥板为弧形,其一端固定安装在所述机架上,另一端为自由端,且其高度低于所述主行走轮轴心;所述挡泥板内侧与所述履带外侧形成刮泥区域。
[0066]
在履带外侧安装挡泥板,可将履带外侧的泥土和杂质从履带上刮下,减少了泥土和杂质在履带上的附着,提高了田园管理机的工作效率,降低了劳动强度。
[0067]
作为一种优选的实施方式,所述挡泥板73内侧形成有刮刀74,所述刮刀下表面从所述挡泥板到所述履带方向为向下倾斜的斜面,且所述刮刀顶部与所述履带外侧的距离为0.5~2cm。
[0068]
在挡泥板内侧设置刮刀,刮刀顶端靠近履带,将履带上的泥土和杂质刮下,从而减少了泥土等对履带的负重。
[0069]
作为一种优选的实施方式,所述挡泥板73内侧位于所述刮刀下方位置处安装有刮泥辊轮75,所述刮泥辊轮表面与所述履带外侧之间的距离为0.1~0.5cm。
[0070]
由于刮刀在刮泥实践中会存在刮泥量过大时堵塞的问题,这里采用两级刮泥,通过刮泥辊轮将履带中绝大部分泥土刮下,使得在刮刀刮泥时履带上附着的数量较少,从而降低了刮刀刮泥的强度。
[0071]
上述说明示出并描述了本发明的优选实施例,如前所述,应当理解本发明并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述发明构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本发明的精神和范围,则都应在本发明所附权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1