一种珊瑚礁区棘冠海星的采集装置的制作方法
1.本发明属于海洋生态环境治理技术领域,涉及一种珊瑚礁区棘冠海星的采集装置。
背景技术:
2.珊瑚虫在白色幼虫阶段便自动固定在先辈珊瑚的石灰质遗骨堆上,珊瑚是珊瑚虫分泌出的外壳,珊瑚的化学成分主要为碳酸钙,以微晶方解石集合体形式存在,成分中还有一定数量的有机质,形态多呈树枝状,上面有纵条纹,每个单体珊瑚横断面有同心圆状和放射状条纹,颜色常呈白色,也有少量蓝色和黑色,珊瑚不仅形象像树枝,颜色鲜艳美丽,可以做装饰品,并且还有很高的药用价值,但是相对于药用价值而言它在环境方面的作用更是无可替代的。
3.珊瑚礁是具有极高生物生产力和生物多样性的海洋生态系统之一,在所有海洋生态系统中生物多样性和生产力最高,有约90万种生物,虽然面积仅占世界海洋生态系统的0.2%,但其价值和提供的服务占海洋生态系统的2.85%,显示了珊瑚礁对于全球的贡献。目前有几亿人生活在珊瑚礁的附近,珊瑚礁为当地居民提供了食物来源,也为潜水者提供了休闲娱乐的场所。
4.由于台风天气、珊瑚礁鱼类减少、全球升温、人类活动等因素影响,海星在全球主要珊瑚礁分布海域都出现过大规模的暴发,对珊瑚礁生态系统造成毁灭性的影响。特别是棘冠海星,每年可以吃掉大部分的健康珊瑚礁。
5.目前防治海星暴发的方法主要有人工移除清理、水下机器人注射和利用诱饵捕获等方法,人工移除清理是指通过潜水员潜入海底对附着在珊瑚礁上的海星进行移除,这种方式效率低、安全隐患大;水下机器人注射是指利用能够杀死海星的药剂注入到海星体内,通过快速杀死海星达到清除珊瑚礁上海星的目的,但致死的海星腐烂在珊瑚礁生态系统中,可能引起二次污染,对珊瑚礁生态系统仍存在新的威胁,缺少二次收拣;利用诱饵捕获海星是利用海星喜欢的饵食吸引海星离开珊瑚礁区域,这种方式虽安全,但可能吸引其他海洋生物,并且在饵食消失后,海星仍会重新回到珊瑚礁上,清除并不彻底。
6.成龄的棘冠海星几乎没有天敌,除了大法螺,因此采用大法螺进行生物防治,大法螺捕获棘冠海星后,就会用它们有如锉刀一般粗糙的舌齿将海星撕扯成微小的碎片后吞入腹中,令棘冠海星们无法重生。
7.基于此,我们提出一种珊瑚礁区棘冠海星的采集装置,通过伸缩臂机构、夹爪机构和调节机械臂配合,实现快速夹持采集捕捉棘冠海星;通过伸缩输送机构和放置布袋配合,实现输送采集捕捉的棘冠海星;通过伸缩臂机构和注药机构配合,实现有效对棘冠海星进行定量注药,快速杀死棘冠海星,便于后期采集;通过旋转机构与伸缩输送机构及调角输送机构配合,实现快速将大法螺导入珊瑚区,进行生物防治,污染小、效果好、成本低。
技术实现要素:
8.本发明的目的是针对现有的技术存在上述问题,提出了一种珊瑚礁区棘冠海星的采集装置,该发明要解决的技术问题是:如何实现快速有效的夹取采集输送棘冠海星,并还能进行生物防治。
9.本发明的目的可通过下列技术方案来实现:
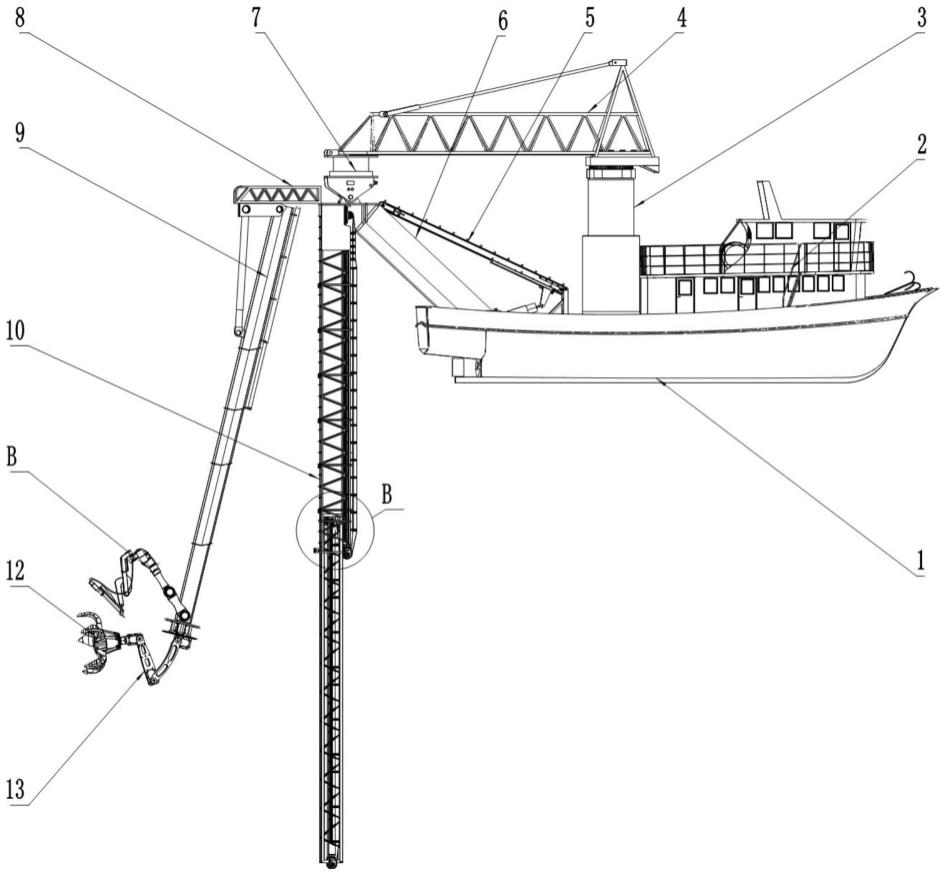
10.一种珊瑚礁区棘冠海星的采集装置,包括采集船,所述采集船上端设有放置仓、升降液压柱和调角输送机构,升降液压柱上端设有主支撑架,主支撑架的下侧端部设有旋转机构,旋转机构的下端设有伸缩输送机构,旋转机构的前侧固定有连接架,连接架的下端设有伸缩臂机构,伸缩臂机构的下端设有注药机构和调节机械臂,注药机构位于调节机械臂的上侧,调节机械臂的端部设有夹爪机构,旋转机构的下端后侧设有放置布袋。
11.本发明的工作原理:将本发明通过采集船移动至珊瑚礁区处的上方,通过升降液压柱带动主支撑架升降,然后带动伸缩输送机构和伸缩臂机构伸入海底,旋转机构带动伸缩输送机构倾斜,控制调节机械臂,调节机械臂带动夹爪机构移动至珊瑚上的棘冠海星上方,然后将其夹住,夹住后,放入伸缩输送机构上,伸缩输送机构将棘冠海星输送至上方,棘冠海星落入放置布袋内部,棘冠海星顺着放置布袋落入采集船上,存入放置仓内部,对于停在珊瑚缝隙处的棘冠海星,通过注药机构对棘冠海星进行定量注药,快速杀死棘冠海星,棘冠海星死亡后,经过海水冲击,可飘出珊瑚,再进行采集捕捉;对于较小的棘冠海星,夹爪采集和注药杀死不方便,可通过旋转机构带动伸缩输送机构旋转度,再反向倾斜,然后将大法螺放置在调角输送机构上,调角输送机构将大法螺输送至伸缩输送机构上,伸缩输送机构反向转动输送,将大法螺输送至海底,也可再通过调节机械臂和夹爪机构将大法螺放置到珊瑚上,大法螺是棘冠海星的天敌,以棘冠海星为食,进行生物防治。
12.所述调角输送机构包括基架,基架呈l型,基架固定在采集船上端,基架的一端铰接有电动推杆,基架的另一端铰接有履带架,履带架上设有输送履带,履带架的侧部固定有送料电机,送料电机的输出轴与输送履带传动连接,履带架的下方设有下框架,下框架与电动推杆的伸缩端铰接在一起,输送履带穿过下框架,履带架的端部位于旋转机构的侧部。
13.采用以上结构,电动推杆的伸缩端伸长,从而推动下框架,下框架向上顶动履带架展开,使得履带架的端部位于旋转机构的侧部,然后送料电机的输出轴带动输送履带转动,输送履带带动大法螺,然后将大法螺输送至伸缩输送机构,输送至珊瑚上。
14.所述旋转机构包括顶板和底板,顶板固定在主支撑架的下侧端部,顶板的下端固定有旋转电机,旋转电机的输出轴下端固定有安装座,底板的上端设有双轴旋角电机,双轴旋角电机的双轴固定在安装座上,安装座的内侧固定有推杆电机,推杆电机的伸缩端部固定有抵触块,底板上方固定有限位板,限位板上开设有避让孔,避让孔的圆心与双轴旋角电机的轴心共线,抵触块抵触在限位板上。
15.采用以上结构,旋转电机带动安装座旋转,从而可带动伸缩输送机构和伸缩臂机构旋转,双轴旋角电机可带动伸缩输送机构和伸缩臂机构调节角度,角度调整完成后,推杆电机的伸缩端部伸出,带动抵触块,抵触块抵触在限位板上,将伸缩输送机构和伸缩臂机构的角度锁定。
16.所述放置布袋的上端设有两个安装杆,两个安装杆可拆卸地连接在底板的内侧,放置布袋的下端设有连接框,连接框可拆卸地连接在采集船上方,连接架可拆卸地连接在
底板的外侧。
17.采用以上结构,安装杆可拆卸地连接在底板的内侧,连接框可拆卸地连接在采集船上方,方便拆卸,安装完成后,将采集捕捉的棘冠海星从放置布袋滑落到采集船上,投放大法螺时,可将安装杆从底板的内侧拆除,或将连接框从采集船上方拆卸,方便旋转机构带动连接架和伸缩输送机构转动,连接架可拆卸地连接在底板的外侧,方便安装和拆卸。
18.所述伸缩输送机构包括框箱和第二收置框架,框箱固定在底板下方,框箱的下方固定有第一收置框架,第一收置框架上转动设有第一刮板履带,第一收置框架上固定有第一履带电机,第一履带电机的输出轴与第一刮板履带传动连接,第一收置框架内部设有齿轮导轨,第二收置框架滑动设置在第一收置框架内部,第二收置框架的两侧转动设有齿轮导轮,第二收置框架的内部设有伸缩电机,伸缩电机的输出轴与齿轮导轮传动连接,齿轮导轮与齿轮导轨啮合,第二收置框架上转动设有第二刮板履带,第二收置框架上固定有第二履带电机,第二履带电机的输出轴与第二刮板履带传动连接。
19.采用以上结构,第一履带电机的输出轴带动第一刮板履带传动,第二履带电机的输出轴带动第二刮板履带传动,进行输送,伸缩电机的输出轴带动齿轮导轮转动,齿轮导轮与齿轮导轨啮合,从而带动第二收置框架在第一收置框架内部滑动移动,用于调整第二刮板履带的端部的深度,从而将第二刮板履带置于珊瑚上部。
20.所述伸缩臂机构包括底座,底座固定在连接架的下端,底座的两端分别铰接有多节伸缩液压臂和调节推杆,调节推杆的端部铰接在多节伸缩液压臂的最上端的液压臂体上,多节伸缩液压臂的末端设有摄像探头。
21.采用以上结构,调节推杆的伸缩,带动多节伸缩液压臂在底座上转动,从而调节多节伸缩液压臂的角度,多节伸缩液压臂可带动伸缩输送机构和伸缩臂机构的调整角度,也可带动摄像探头移动,用于观察棘冠海星的位置。
22.所述注药机构包括第一旋臂,第一旋臂设置在多节伸缩液压臂端部侧端,第一旋臂的末端设有第二旋臂,第二旋臂的端部设有注药推杆,注药推杆上设有注射器,注射器的输出端连接有三通管,三通管的另外两端均连接有单向阀,两个单向阀的方向相反,进料的单向阀连接有注药软管,注药软管的末端连接有药箱,药箱固定在采集船上方,出料的单向阀连接有注射针头。
23.采用以上结构,第一旋臂带动第二旋臂上下摆动,第二旋臂带动注药推杆左右摆动,从而可带动注药推杆上下、左右摆动,注药推杆带动注射器的活塞杆后拉,从进料的单向阀吸取,继而通过注药软管吸取药箱内部的药液,然后注药推杆带动注射器的活塞杆前推,从出料的单向阀排出,继而通过注射针头排出,注入棘冠海星内部。
24.所述调节机械臂包括旋转座,旋转座固定在多节伸缩液压臂的末端,旋转座上设有第三旋臂,夹爪机构包括夹爪基座,夹爪基座固定在第三旋臂的端部,夹爪基座的一端铰接有若干圆周均布的夹爪推杆,夹爪基座的另一端铰接有若干圆周均布的夹爪,夹爪与夹爪推杆的数量位置相对应,夹爪推杆铰接在对应位置的夹爪上,夹爪的端部固定有加固钢化端头,夹爪基座的端面中部设有摄像探头。
25.采用以上结构,旋转座带动第三旋臂转动,第三旋臂带动夹爪机构移动,通过夹爪基座的端面中部的摄像探头,观察棘冠海星的位置,移动至棘冠海星上方,夹爪推杆的伸缩端伸出,带动夹爪围绕夹爪基座转动闭合,从而将棘冠海星夹住,进行采集捕捉。
26.与现有技术相比,本珊瑚礁区棘冠海星的采集装置具有以下优点:
27.通过伸缩臂机构、夹爪机构和调节机械臂配合,实现快速夹持采集捕捉棘冠海星;通过伸缩输送机构和放置布袋配合,实现输送采集捕捉的棘冠海星;通过伸缩臂机构和注药机构配合,实现有效对棘冠海星进行定量注药,快速杀死棘冠海星,便于后期采集;通过旋转机构与伸缩输送机构及调角输送机构配合,实现快速将大法螺导入珊瑚区,进行生物防治,污染小、效果好、成本低。
附图说明
28.图1是本发明的正视结构示意图;
29.图2是本发明在采集状态时的立体结构示意图;
30.图3是本发明在释放状态时的立体结构示意图;
31.图4是本发明中部分部件的立体结构示意图;
32.图5是本发明中调节机构的立体结构示意图;
33.图6是本发明中调角输送机构的立体结构示意图;
34.图7是本发明中伸缩输送机构的立体结构示意图;
35.图8是本发明中局部部件的立体结构示意图;
36.图9是本发明a处的放大结构示意图;
37.图10是本发明b处的放大结构示意图;
38.图11是本发明c处的放大结构示意图。
39.图中,1、采集船;2、放置仓;3、升降液压柱;4、主支撑架;5、调角输送机构;6、放置布袋;7、旋转机构;8、连接架;9、伸缩臂机构;10、伸缩输送机构;11、注药机构;12、夹爪机构;13、调节机械臂;14、顶板;15、旋转电机;16、安装座;17、底板;18、双轴旋角电机;19、推杆电机;20、基架;21、电动推杆;22、下框架;23、输送履带;24、送料电机;25、框箱;26、第一刮板履带;27、第一收置框架;28、第一履带电机;29、第二收置框架;30、第二刮板履带;31、第二履带电机;32、底座;33、多节伸缩液压臂;34、调节推杆;35、第一旋臂;36、第二旋臂;37、注药软管;38、注药推杆;39、注射器;40、旋转座;41、第三旋臂;42、夹爪基座;43、夹爪推杆;44、夹爪;45、加固钢化端头。
具体实施方式
40.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
41.本珊瑚礁区棘冠海星的采集装置,如图1-图9所示,包括采集船1,所述采集船1上端设有放置仓2、升降液压柱3和调角输送机构5,升降液压柱3上端设有主支撑架4,主支撑架4的下侧端部设有旋转机构7,旋转机构7的下端设有伸缩输送机构10,旋转机构7的前侧固定有连接架8,连接架8的下端设有伸缩臂机构9,伸缩臂机构9的下端设有注药机构11和调节机械臂13,注药机构11位于调节机械臂13的上侧,调节机械臂13的端部设有夹爪机构12,旋转机构7的下端后侧设有放置布袋6。
42.将本发明通过采集船1移动至珊瑚礁区处的上方,通过升降液压柱3带动主支撑架4升降,然后带动伸缩输送机构10和伸缩臂机构9伸入海底,旋转机构7带动伸缩输送机构10
倾斜,控制调节机械臂13,调节机械臂13带动夹爪机构12移动至珊瑚上的棘冠海星上方,然后将其夹住,夹住后,放入伸缩输送机构10上,伸缩输送机构10将棘冠海星输送至上方,棘冠海星落入放置布袋6内部,棘冠海星顺着放置布袋6落入采集船1上,存入放置仓2内部。
43.对于停在珊瑚缝隙处的棘冠海星,通过注药机构11对棘冠海星进行定量注药,快速杀死棘冠海星,棘冠海星死亡后,经过海水冲击,可飘出珊瑚,再进行采集捕捉;对于较小的棘冠海星,夹爪采集和注药杀死不方便,可通过旋转机构7带动伸缩输送机构10旋转90度,再反向倾斜,然后将大法螺放置在调角输送机构5上,调角输送机构5将大法螺输送至伸缩输送机构10上,伸缩输送机构10反向转动输送,将大法螺输送至海底,也可再通过调节机械臂13和夹爪机构12将大法螺放置到珊瑚上,大法螺是棘冠海星的天敌,以棘冠海星为食,进行生物防治。
44.调角输送机构5包括基架20,基架20呈l型,基架20固定在采集船1上端,基架20的一端铰接有电动推杆21,基架20的另一端铰接有履带架,履带架上设有输送履带23,履带架的侧部固定有送料电机24,送料电机24的输出轴与输送履带23传动连接,履带架的下方设有下框架22,下框架22与电动推杆21的伸缩端铰接在一起,输送履带23穿过下框架22,履带架的端部位于旋转机构7的侧部;电动推杆21的伸缩端伸长,从而推动下框架22,下框架22向上顶动履带架展开,使得履带架的端部位于旋转机构7的侧部,然后送料电机24的输出轴带动输送履带23转动,输送履带23带动大法螺,然后将大法螺输送至伸缩输送机构10,输送至珊瑚上。
45.旋转机构7包括顶板14和底板17,顶板14固定在主支撑架4的下侧端部,顶板14的下端固定有旋转电机15,旋转电机15的输出轴下端固定有安装座16,底板17的上端设有双轴旋角电机18,双轴旋角电机18的双轴固定在安装座16上,安装座16的内侧固定有推杆电机19,推杆电机19的伸缩端部固定有抵触块,底板17上方固定有限位板,限位板上开设有避让孔,避让孔的圆心与双轴旋角电机18的轴心共线,抵触块抵触在限位板上;旋转电机15带动安装座16旋转,从而可带动伸缩输送机构10和伸缩臂机构9旋转,双轴旋角电机18可带动伸缩输送机构10和伸缩臂机构9调节角度,角度调整完成后,推杆电机19的伸缩端部伸出,带动抵触块,抵触块抵触在限位板上,将伸缩输送机构10和伸缩臂机构9的角度锁定。
46.放置布袋6的上端设有两个安装杆,两个安装杆可拆卸地连接在底板17的内侧,放置布袋6的下端设有连接框,连接框可拆卸地连接在采集船1上方,连接架8可拆卸地连接在底板17的外侧;安装杆可拆卸地连接在底板17的内侧,连接框可拆卸地连接在采集船1上方,方便拆卸,安装完成后,将采集捕捉的棘冠海星从放置布袋6滑落到采集船1上,投放大法螺时,可将安装杆从底板17的内侧拆除,或将连接框从采集船1上方拆卸,方便旋转机构7带动连接架8和伸缩输送机构10转动,连接架8可拆卸地连接在底板17的外侧,方便安装和拆卸。
47.伸缩输送机构10包括框箱25和第二收置框架29,框箱25固定在底板17下方,框箱25的下方固定有第一收置框架27,第一收置框架27上转动设有第一刮板履带26,第一收置框架27上固定有第一履带电机28,第一履带电机28的输出轴与第一刮板履带26传动连接,第一收置框架27内部设有齿轮导轨,第二收置框架29滑动设置在第一收置框架27内部,第二收置框架29的两侧转动设有齿轮导轮,第二收置框架29的内部设有伸缩电机,伸缩电机的输出轴与齿轮导轮传动连接,齿轮导轮与齿轮导轨啮合,第二收置框架29上转动设有第
二刮板履带30,第二收置框架29上固定有第二履带电机31,第二履带电机31的输出轴与第二刮板履带30传动连接;第一履带电机28的输出轴带动第一刮板履带26传动,第二履带电机31的输出轴带动第二刮板履带30传动,进行输送,伸缩电机的输出轴带动齿轮导轮转动,齿轮导轮与齿轮导轨啮合,从而带动第二收置框架29在第一收置框架27内部滑动移动,用于调整第二刮板履带30的端部的深度,从而将第二刮板履带30置于珊瑚上部。
48.伸缩臂机构9包括底座32,底座32固定在连接架8的下端,底座32的两端分别铰接有多节伸缩液压臂33和调节推杆34,调节推杆34的端部铰接在多节伸缩液压臂33的最上端的液压臂体上,多节伸缩液压臂33的末端设有摄像探头;调节推杆34的伸缩,带动多节伸缩液压臂33在底座32上转动,从而调节多节伸缩液压臂33的角度,多节伸缩液压臂33可带动伸缩输送机构10和伸缩臂机构9的调整角度,也可带动摄像探头移动,用于观察棘冠海星的位置。
49.注药机构11包括第一旋臂35,第一旋臂35设置在多节伸缩液压臂33端部侧端,第一旋臂35的末端设有第二旋臂36,第二旋臂36的端部设有注药推杆38,注药推杆38上设有注射器39,注射器39的输出端连接有三通管,三通管的另外两端均连接有单向阀,两个单向阀的方向相反,进料的单向阀连接有注药软管37,注药软管37的末端连接有药箱,药箱固定在采集船1上方,出料的单向阀连接有注射针头;第一旋臂35带动第二旋臂36上下摆动,第二旋臂36带动注药推杆38左右摆动,从而可带动注药推杆38上下、左右摆动,注药推杆38带动注射器39的活塞杆后拉,从进料的单向阀吸取,继而通过注药软管37吸取药箱内部的药液,然后注药推杆38带动注射器39的活塞杆前推,从出料的单向阀排出,继而通过注射针头排出,注入棘冠海星内部。
50.调节机械臂13包括旋转座40,旋转座40固定在多节伸缩液压臂33的末端,旋转座40上设有第三旋臂41,夹爪机构12包括夹爪基座42,夹爪基座42固定在第三旋臂41的端部,夹爪基座42的一端铰接有若干圆周均布的夹爪推杆43,夹爪基座42的另一端铰接有若干圆周均布的夹爪44,夹爪44与夹爪推杆43的数量位置相对应,夹爪推杆43铰接在对应位置的夹爪44上,夹爪44的端部固定有加固钢化端头45,夹爪基座42的端面中部设有摄像探头;旋转座40带动第三旋臂41转动,第三旋臂41带动夹爪机构12移动,通过夹爪基座42的端面中部的摄像探头,观察棘冠海星的位置,移动至棘冠海星上方,夹爪推杆43的伸缩端伸出,带动夹爪44围绕夹爪基座42转动闭合,从而将棘冠海星夹住,进行采集捕捉。
51.珊瑚礁区棘冠海星的采集装置的操作方法:
52.1、将本发明通过采集船1移动至珊瑚礁区处的上方,通过升降液压柱3带动主支撑架4升降,然后带动伸缩输送机构10和伸缩臂机构9伸入海底。
53.2.1、采集珊瑚上方较易采集捕捉的棘冠海星:
54.旋转电机15带动安装座16旋转,从而可带动伸缩输送机构10和伸缩臂机构9旋转,双轴旋角电机18可带动伸缩输送机构10和伸缩臂机构9调节角度,角度调整完成后,推杆电机19的伸缩端部伸出,带动抵触块,抵触块抵触在限位板上,将伸缩输送机构10和伸缩臂机构9的角度锁定;
55.第一履带电机28的输出轴带动第一刮板履带26传动,第二履带电机31的输出轴带动第二刮板履带30传动,进行输送,伸缩电机的输出轴带动齿轮导轮转动,齿轮导轮与齿轮导轨啮合,从而带动第二收置框架29在第一收置框架27内部滑动移动,用于调整第二刮板
履带30的端部的深度,从而将第二刮板履带30置于珊瑚上部;
56.调节推杆34的伸缩,带动多节伸缩液压臂33在底座32上转动,从而调节多节伸缩液压臂33的角度,多节伸缩液压臂33可带动伸缩输送机构10和伸缩臂机构9的调整角度,也可带动摄像探头移动,用于观察棘冠海星的位置;
57.旋转座40带动第三旋臂41转动,第三旋臂41带动夹爪机构12移动,通过夹爪基座42的端面中部的摄像探头,观察棘冠海星的位置,移动至棘冠海星上方,夹爪推杆43的伸缩端伸出,带动夹爪44围绕夹爪基座42转动闭合,从而将棘冠海星夹住,进行采集捕捉;
58.夹住后,放入伸缩输送机构10上,伸缩输送机构10将棘冠海星输送至上方,棘冠海星落入放置布袋6内部,棘冠海星顺着放置布袋6落入采集船1上,存入放置仓2内部。
59.2.2、注药杀死珊瑚缝隙处的不易捕捉的棘冠海星:
60.通过升降液压柱3带动主支撑架4升降,然后带动伸缩臂机构9伸入海底,第一旋臂35带动第二旋臂36上下摆动,第二旋臂36带动注药推杆38左右摆动,从而可带动注药推杆38上下、左右摆动,注药推杆38带动注射器39的活塞杆后拉,从进料的单向阀吸取,继而通过注药软管37吸取药箱内部的药液,然后注药推杆38带动注射器39的活塞杆前推,从出料的单向阀排出,继而通过注射针头排出,注入棘冠海星内部,快速杀死棘冠海星,棘冠海星死亡后,经过海水冲击,可飘出珊瑚,再进行采集捕捉。
61.2.3、对于较小的夹爪采集和注药杀死都不方便的棘冠海星:
62.可通过旋转机构7带动伸缩输送机构10旋转90度,再反向倾斜,然后将大法螺放置在调角输送机构5上,电动推杆21的伸缩端伸长,从而推动下框架22,下框架22向上顶动履带架展开,使得履带架的端部位于旋转机构7的侧部,然后送料电机24的输出轴带动输送履带23转动,输送履带23带动大法螺,然后将大法螺输送至伸缩输送机构10,输送至珊瑚上,伸缩输送机构10反向转动输送,将大法螺输送至海底,也可再通过调节机械臂13和夹爪机构12将大法螺放置到珊瑚上,大法螺是棘冠海星的天敌,以棘冠海星为食,进行生物防治。
63.综上:
64.本发明通过伸缩臂机构9、夹爪机构12和调节机械臂13配合,实现快速夹持采集捕捉棘冠海星。
65.本发明通过伸缩输送机构10和放置布袋6配合,实现输送采集捕捉的棘冠海星。
66.本发明通过伸缩臂机构9和注药机构11配合,实现有效对棘冠海星进行定量注药,快速杀死棘冠海星,便于后期采集。
67.本发明通过旋转机构7与伸缩输送机构10及调角输送机构5配合,实现快速将大法螺导入珊瑚区,进行生物防治,污染小、效果好、成本低。
68.为使本发明实施例的目的、技术方案和优点更加清楚,上面结合本发明实施例中的附图,对本发明实施例中的技术方案进行了清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
69.因此,以上对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
70.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
71.在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1