具智能采摘功能的植栽系统的制作方法
具智能采摘功能的植栽系统
1.技术领域:本发明为植物栽培的技术领域,尤指一种具智能采摘功能的植栽系统。
背景技术:
2.已知,现有一种植栽塔,例如中国台湾专利号m630113以及m624159所揭示者,其可供用户在其上实施垂直栽种,以达节省空间之效。实际应用前述植栽塔之时,可以将多数个所述植栽塔依行排列或依列排列,或将多数个所述植栽塔排列成一个植栽塔阵列,从而实现大规模的植栽工作。
3.又,另有一种植栽墙,例如中国台湾新型专利号m622189所揭示者,其包含一背板以及设置在所述背板上的多数个植栽盆,供用户在各所述植栽盆内上实施栽种,以达空间绿化和大量植栽之效。
4.实务经验指出,无论是植栽塔阵列或植栽墙,当栽种于其上的植物的叶菜或瓜果成熟时,需要执行横向及纵向的大面积且高单位的采摘作业。易于理解的,若是运用人力来进行此采摘作业,则需要雇用工人势必花费不赀。因此,利用自动采摘设备来执行此采摘作业会是较佳的方案。可惜的是,目前并不存在用于对植栽塔阵列或植栽墙进行叶菜(瓜果)的自动采摘的有关机器/设备。
5.综上所述,可以得知现有的植栽塔阵列或植栽墙具有难以利用人力采摘的缺陷。因此,本案的发明人是极力加以研究发明,而终于研发完成本发明的一种具智能采摘功能的植栽系统。
技术实现要素:
6.本发明的主要目的在于提供一种具智能采摘功能的植栽系统,其具有以下实务优点:(1)可进行纵向自动化瓜果/叶菜采摘,不受高度的限制;(2)可进行横向自动化瓜果/叶菜采摘,不受宽度的限制;(3)可进行纵、横双轴向自动化瓜果/叶菜采摘,实现大面积采摘,节省人力及时间成本;(4)有效率的采摘,不会伤害到瓜果/叶菜;(5)自动判断瓜果/叶菜成熟与否;以及(6)给予最佳的采摘时机点建议。
7.为达成上述目的,本发明提出所述具智能采摘功能的植栽系统的一实施例,其中,包括:
8.一植栽装置,具有多数个植栽件,且各所述件之中系栽种有一植物;
9.一自动移动车辆(automated guided vehicle,agv),包括一车体以及用以使所述车体移动的至少一移动机构;
10.一第一机械手臂,设置在所述车体之上,且持有一摄像机;
11.一第二机械手臂,设置在所述车体之上,且持有一夹持机构;以及
12.一第三机械手臂,设置在所述车体之上,且持有一切割机构;
13.一采收箱,设置在所述车体之上;以及
14.一控制与处理装置,设置在所述车体之上,电性连接所述移动机构、所述第一机械手臂、所述第二机械手臂、与所述第三机械手臂,且包括一微处理器与一记忆体;其中,所述
记忆体内储存有利用一程序语言编辑成的一应用程序,使所述微处理器通过存取所述记忆体以执行所述应用程序,从而启用以下功能:
15.控制所述自动移动车辆移动至邻近所述植栽装置之处;
16.控制所述第一机械手臂移动所述摄像机以对所述植物的一叶菜及/或一瓜果执行一影像撷取作业,从而获得一叶菜影像及/或一瓜果影像;
17.依据所述叶菜影像及/或所述瓜果影像判断所述叶菜及/或所述瓜果是否满足至少一可摘采条件;
18.在满足所述可摘采条件的情况下,控制所述第二机械手臂移动所述夹持机构至所述叶菜及/或所述瓜果之处,并驱动所述夹持机构夹持所述叶菜或所述瓜果;
19.控制所述第三机械手臂移动所述切割机构至受到所述夹持机构夹持的所述叶菜或所述瓜果之处,并驱动所述切割机构切断与所述叶菜或所述瓜果连结的一茎部;以及
20.控制所述第二机械手臂移动所述夹持机构至所述采收箱之处,并驱动所述夹持机构释放所述叶菜或所述瓜果,使其落入所述采收箱。
21.在一实施例中,其中,所述植栽装置为选自于由植栽塔、植栽塔阵列和植栽墙所组成群组之中的任一者。
22.在一实施例中,其中,所述植栽装置进一步设有一电子元件节点(electronic component node)。
23.在一实施例中,其中,所述电子元件节点为选自于由rfid芯片、gps芯片、和无线传输芯片所组成群组之中的任一者。
24.在一实施例中,其中,所述车体上设有一平台,且所述第一机械手臂、所述第二机械手臂、与所述第三机械手臂皆设置在所述平台之上。
25.在一可行实施例中,其中,所述具智能采摘功能的植栽系统更包括:
26.一信号传/收装置,设置在所述车体之上,且耦接所述控制与处理装置;以及
27.一升降机构,连接于所述车体21与所述平台211之间,且耦接所述控制与处理装置。
28.在一实施例中,其中,所述应用程序包含多数个子程序,且所述多数个子程序包括:
29.一定位程序,含有指令(instructions)用以配置所述微处理器控制所述信号传/收装置与所述电子元件节点通信,从而确定所述植栽装置的一位置信息;
30.一车辆移动程序,含有指令用以配置所述微处理器依据所述位置信息而控制所述自动移动车辆移动至邻近所述植栽装置之处;
31.一第一机构控制程序,含有指令用以配置所述微处理器控制所述第一机械手臂移动所述摄像机;
32.一摄像机控制程序,含有指令用以配置所述微处理器控制所述摄像机执行所述影像撷取作业;
33.一第二机构控制程序,含有指令用以配置所述微处理器控制所述第二机械手臂移动所述夹持机构;
34.一夹持机构控制程序,含有指令用以配置所述微处理器控制所述夹持机构夹持所述叶菜或所述瓜果或释放所述叶菜或所述瓜果;
35.一第三机构控制程序,含有指令用以配置所述微处理器控制所述第三机械手臂移动所述切割机构;
36.一切割机构控制程序,含有指令用以配置所述微处理器控制所述切割机构切断所述茎部;以及
37.一升降机构控制程序,含有指令用以配置所述微处理器控制所述升降机构以抬升/下降所述平台。
38.在一实施例中,其中,所述控制与处理装置进一步包括一第一通信介面,使得一电子装置利用其一第二通信介面与所述控制与处理装置的所述第一通信介面信息连结。
39.在一实施例中,其中,所述电子装置安装有一用户应用程序,且通过操作所述用户应用程序可控制所述控制与处理装置,从而通过所述控制与处理装置控制所述自动移动车辆、所述第一机械手臂、所述摄像机、所述第二机械手臂、所述夹持机构、所述第三机械手臂、所述切割机构、或所述升降机构。
附图说明:
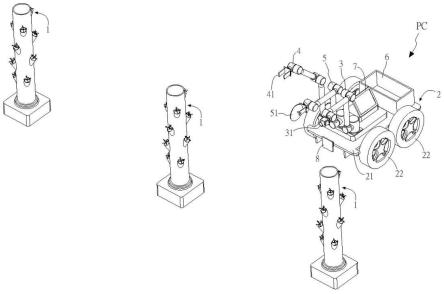
40.图1a为本发明的一种具智能采摘功能的植栽系统的第一立体图;
41.图1b为本发明的具智能采摘功能的植栽系统的第二立体图;
42.图2为本发明的具智能采摘功能的植栽系统的方块图;
43.图3为本发明的具智能采摘功能的植栽系统的第三立体图;
44.图4为本发明的具智能采摘功能的植栽系统的第四立体图;以及
45.图5为图1a所示控制与处理装置的方块图。
46.附图标记:
47.pc:具智能采摘功能的植栽系统
48.1:植栽装置
49.2:自动移动车辆
50.21:车体
51.211:平台
52.212:升降机构
53.22:移动机构
54.3:第一机械手臂
55.31:摄像机
56.4:第二机械手臂
57.41:夹持机构
58.5:第三机械手臂
59.51:切割机构
60.6:采收箱
61.7:控制与处理装置
62.7p:微处理器
63.7m:记忆体
64.7m0:数据库
65.7m1:定位程序
66.7m2:车辆移动程序
67.7m3:第一机构控制程序
68.7m4:摄像机控制程序
69.7m5:第二机构控制程序
70.7m6:夹持机构控制程序
71.7m7:第三机构控制程序
72.7m8:切割机构控制程序
73.7m9:升降机构控制程序
74.7w:第一通信介面
75.8:信号传/收装置
76.9:电子装置
具体实施方式:
77.为了能够更清楚地描述本发明所提出的一种具智能采摘功能的植栽系统,以下将配合附图,详尽说明本发明的较佳实施例。
78.图1a、图1b分别显示本发明的一种具智能采摘功能的植栽系统的第一、第二立体图。并且,图2为本发明的具智能采摘功能的植栽系统的方块图。如图1a、图1b和图2所示,本发明的具智能采摘功能的植栽系统pc包括:一植栽装置1、一自动移动车辆2、持有一摄像机31的一第一机械手臂3、持有一夹持机构41的一第二机械手臂4、持有一切割机构51的一第三机械手臂5、一采收箱6、以及一控制与处理装置7。其中,所述植栽装置1具有多数个植栽件10,且各所述件10之中是栽种有一植物。
79.在一实施例中,如图1a与图1b所示,所述植栽装置1为一植栽塔,且所述植栽件10为设置在所述植栽塔之上的一植栽杯或一植栽盆。另一方面,图3显示本发明的具智能采摘功能的植栽系统的第三立体图。如图3所示,在另一实施例中,所述植栽装置1为利用多数个植栽塔排列而成的一植栽塔阵列,且所述植栽件10为设置在所述植栽塔之上的一植栽杯或一植栽盆。进一步地,图4显示本发明的具智能采摘功能的植栽系统的第四立体图。如图4所示,在又一实施例中,所述植栽装置1为植栽墙,其包含一背板以及设置在所述背板上的多数个植栽盆(即,所述植栽件10),供用户在各所述植栽盆内上实施栽种,以达空间绿化和大量植栽之效。
80.依据本发明的设计,所述自动移动车辆(automated guided vehicle,agv)2包括车体21以及用以使所述车体21移动的至少一移动机构22,其中所述移动机构22为可以是车轮或滑轨。举例而言,图1a与图1b绘示所述移动机构22为车轮。进一步地,如图1a、图1b和图2所示,所述控制与处理装置7、第一机械手臂3、所述第二机械手臂4、所述第三机械手臂5、与所述采收箱6皆设置在所述车体21之上,且第一机械手臂3、所述摄像机31、所述第二机械手臂4、所述夹持机构41、所述第三机械手臂5、与所述切割机构51皆电性连接所述控制与处理装置7。另一方面,如图4所示,所述车体21上还设有一平台211,且所述第一机械手臂3、所述第二机械手臂4、与所述第三机械手臂5皆设置在所述平台211之上。并且,
81.一升降机构212连接于所述车体21与所述平台211之间,且耦接所述控制与处理装
置7。
82.补充说明的是,所述植栽装置1进一步设有一电子元件节点(electronic component node),例如以rfid芯片、gps芯片、或无线传输芯片做为所述电子元件节点。对应地,所述车体21之上进一步设有一个信号传/收装置8,且所述信号传/收装置8耦接所述控制与处理装置7。
83.图5为图1a所示控制与处理装置的方块图。如图1a、图1b、图2、与图5所示,所述控制与处理装置7包括一微处理器7p、一记忆体7m与一第一通信介面7w,且所述记忆体7m内储存有利用一程序语言编辑成的一应用程序,使所述微处理器7p通过存取所述记忆体7m以执行所述应用程序,从而进行自动化叶菜(瓜果)采摘作业。依据本发明的设计,所述应用程序包含多数个子程序,其包括:一定位程序7m1、一车辆移动程序7m2、一第一机构控制程序7m3、一摄像机控制程序7m4、一第二机构控制程序7m5、一夹持机构控制程序7m6、一第三机构控制程序7m7、一切割机构控制程序7m8、以及一升降机构控制程序7m9。
84.更详细地说明,所述定位程序7m1含有指令(instructions)用以配置所述微处理器7p控制所述信号传/收装置8与所述电子元件节点通信,从而确定所述植栽装置1的一位置信息。换句话说,在执行所述定位程序7m1之后,所述微处理器7p是控制所述信号传/收装置8与所述电子元件节点(如:rfid芯片)通信,从而确定所述植栽装置1的一位置信息。举例而言,所述植栽装置1为如图1a所示的植栽塔,则所述位置信息包含所述植栽塔的2d座标或3d座标。再举例而言,所述植栽装置1为如图3所示的植栽塔阵列,则所述位置信息包含各个所述植栽塔的2d座标、3d座标或阵列座标。
85.另一方面,所述车辆移动程序7m2含有指令用以配置所述微处理器7p依据所述位置信息而控制所述自动移动车辆2移动至邻近所述植栽装置1之处。例如,所述植栽装置1为如图3所示的植栽塔阵列(包含m
×
n),则所述微处理器7p(控制与处理装置7)控制所述自动移动车辆2移动至所述植栽塔阵列之中的第(m,n)个植栽塔之处。应可理解,(m,n)为所述阵列座标。
86.再者,所述第一机构控制程序7m3含有指令用以配置所述微处理器7p控制所述第一机械手臂3移动所述摄像机31,且所述摄像机控制程序7m4含有指令用以配置所述微处理器7p控制所述摄像机31,从而对所述植物的一叶菜及/或一瓜果执行一影像撷取作业。完成所述影像撷取作业之后,是获得一叶菜影像及/或一瓜果影像,并将所述叶菜影像及/或所述瓜果影像储存在所述记忆体7m的一数据库7m0内。接着,通过所述第一通信介面7w,所述微处理器7p可以将所述叶菜影像及/或所述瓜果影像传送至一后端电子装置,从而依据所述叶菜影像及/或所述瓜果影像判断所述叶菜及/或所述瓜果是否满足至少一可摘采条件。具体地,所述后端电子装置对所述叶菜影像及/或所述瓜果影像进行影像辨识,亦即通过演算法判断瓜果/作物是否已经成熟而可以进行采摘。
87.如图1a、图1b、图2、与图5所示,所述第二机构控制程序7m5含有指令用以配置所述微处理器7p控制所述第二机械手臂4移动所述夹持机构41,所述夹持机构控制程序7m6,含有指令用以配置所述微处理器7p控制所述夹持机构41夹持所述叶菜或所述瓜果或释放所述叶菜或所述瓜果,所述第三机构控制程序7m7含有指令用以配置所述微处理器7p控制所述第三机械手臂3移动所述切割机构51,且所述切割机构控制程序7m8,含有指令用以配置所述微处理器7p控制所述切割机构51。举例而言,在满足所述可摘采条件的情况下,所述微
处理器7p控制所述第二机械手臂4移动所述夹持机构41至所述叶菜及/或所述瓜果之处,并驱动所述夹持机构41夹持所述叶菜或所述瓜果。继续地,所述微处理器7p控制所述第三机械手臂5移动所述切割机构51至受到所述夹持机构41夹持的所述叶菜或所述瓜果之处,并驱动所述切割机构51切断与所述叶菜或所述瓜果连结的一茎部。最终,所述微处理器7p控制所述第二机械手臂4移动所述夹持机构41至所述采收箱6之处,并驱动所述夹持机构41释放所述叶菜或所述瓜果,使其落入所述采收箱6。
88.补充说明的是,在对第(m,n)个植栽塔的各个所述植栽件10之内的植物进行摄像及瓜果(叶菜)采摘时,如图4所示,若有需要时,所述微处理器7p执行所述升降机构控制程序7m9,从而依据指令(instructions)控制所述升降机构212以抬升/下降所述平台211。再行补充说明的是,若后端电子装置依据所述叶菜影像及/或所述瓜果影像判断所述叶菜及/或所述瓜果还未臻成熟,后端电子装置可以进一步地推估述叶菜及/或所述瓜果的一预计采摘日。之后,当预计采摘日来临时,所述控制与处理装置7即控制搭载有所述第一机械手臂3、所述摄像机31、所述第二机械手臂4、所述夹持机构41、所述第三机械手臂5、以及所述切割机构51的自动移动车辆2,从而对栽种在所述植栽装置1之上的多数个植物执行自动化叶菜(瓜果)采摘作业。
89.在可行的实施例中,如图1a、图1b与图2所示,一电子装置9可利用其一第二通信介面与所述控制与处理装置7的所述第一通信介面7w信息连结。亦即,用户可以使用其笔记本电脑、智能型手机或平板电脑作为所述电子装置9,从而信息连结所述控制与处理装置7。其中,所述电子装置9安装有一用户应用程序,因此用户可以通过操作所述用户应用程序可控制所述控制与处理装置7,从而通过所述控制与处理装置7控制所述自动移动车辆2、所述第一机械手臂3、所述摄像机31、所述第二机械手臂4、所述夹持机构41、所述第三机械手臂5、所述切割机构51、与所述升降机构211,从而对栽种在所述植栽装置1之上的多数个植物执行自动化叶菜(瓜果)采摘作业。
90.如此,上述是已完整且清楚地说明本发明的一种具智能采摘功能的植栽系统。具体而言,本发明的具智能采摘功能的植栽系统具有以下实务优点:
91.(1)可进行纵向自动化瓜果/叶菜采摘,不受高度的限制;
92.(2)可进行横向自动化瓜果/叶菜采摘,不受宽度的限制;
93.(3)可进行纵、横双轴向自动化瓜果/叶菜采摘,实现大面积采摘,节省人力及时间成本;
94.(4)有效率的采摘,不会伤害到瓜果/叶菜;
95.(5)自动判断瓜果/叶菜成熟与否;以及(6)给予最佳的采摘时机点建议。
96.必须加以强调的是,上述的详细说明是针对本发明可行实施例的具体说明,惟所述实施例并非用以限制本发明的权利要求范围,凡未脱离本发明技艺精神所为的等效实施或变更,均应包含于本案的权利要求范围中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1