一种水果采摘无人机以及作业方法
本发明涉及水果采摘装置及方法,具体涉及一种水果采摘无人机以及作业方法。
背景技术:
1、荔枝、龙眼等串型水果是热带亚热带地区的特产名果,具有重要的经济价值,其主要生长在高约10米的树上。
2、目前荔枝、龙眼采摘以人工手动采摘为主,人工采摘时一般通过爬树或者借助梯子进行采摘,作业位置高且空间移动不便,因此采摘效率不高,很容易因为采摘不及时,延误了对采后果实的保鲜储藏,导致果实品质变差。因此,为降低荔枝、龙眼等串型水果的采摘成本,开发能够自动采摘此类水果的农业机器人是具有经济价值的。
3、因此,发展机器智能化采收具有较强的实用价值和现实意义。机器智能化采收克服了传统采摘劳动强度大、人工成本高、采摘效率低、工作环境差等缺陷,是将来果实采摘的发展趋势。而现有的采摘装置主要依靠地面行走的结构,行走在果树之间进行采摘,难以够到位于高处或者背面位置的水果,且效率较低。
技术实现思路
1、本发明的目的在于克服上述存在的问题,提供一种水果采摘无人机,该水果采摘无人机能够对任意位置的水果进行采摘,尤其是位于高处或者背面位置的水果,可以提高荔枝、龙眼等串型水果采摘的自动化水平。
2、本发明的另一个目的在于提供一种水果采摘无人机的作业方法。
3、本发明的目的通过以下技术方案实现:
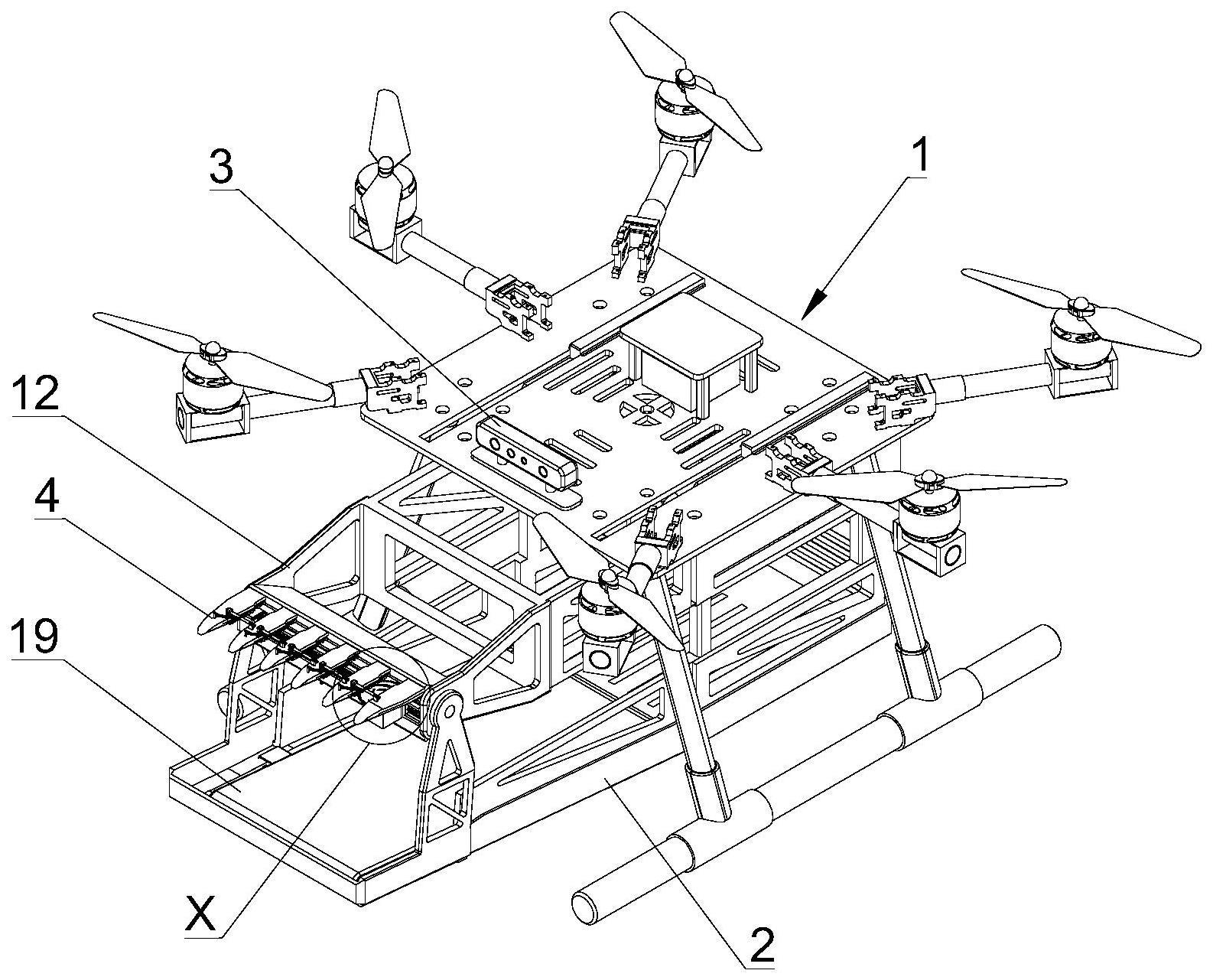
4、一种水果采摘无人机,包括无人机本体和采摘模块,所述采摘模块固定连接在无人机本体上;
5、所述采摘模块包括用于确定水果所处位置的视觉定位机构、用于对水果的枝条进行切割的切枝机构和用于对水果进行存放的收果筐;所述视觉定位机构包括用于获取水果的图像的相机和用于对图像进行处理得出水果的位置的定位处理单元;所述定位处理单元分别与相机、无人机本体电连接;
6、所述切枝机构设置在收果筐的上方,该切枝机构包括切枝梳和切割机构,所述切枝梳转动连接在收果筐的上方,该切枝梳包括多个直线均匀分布的梳齿;相邻的两个梳齿之间的间隙构成切割空间;所述切割机构包括切割轮、用于驱动切割轮进行旋转的旋转驱动机构和用于驱动切割轮进行横向移动的横向驱动机构,所述横向驱动机构的驱动方向与所述梳齿的排列方向平行。
7、上述水果采摘无人机的工作原理为:
8、工作时,通过无人机本体搭载采摘模块围绕果树飞行;通过相机对果树进行拍摄,并将获取到的图像传输至定位处理单元中,由定位处理单元对图像进行分析处理,从而得到水果的相对位置;无人机本体调整自身的位置,使得无人机本体准确飞到待剪果树枝前面,并将切枝梳插向果实的母枝,使得果实的母枝进入两个梳齿之间的切割空间中。通过旋转驱动机构驱动切割轮进行旋转,并通过横向驱动机构驱动切割轮进行横向移动,由切割轮对插在切割空间中的枝条进行切割,从而将果实带枝进行切断。进一步,由于切枝梳转动连接,在剪枝过程中,可以确保切枝梳与果枝时刻保持垂直状态,以便顺利完成切割工作。切断后的果实掉落至下方的收集筐中,由收集筐进行统一收集。
9、采摘完设定重量的果实后,无人机本体自主运行到合适的地方降落,以便取出所采摘果实,结束采摘工作。
10、本发明的一个优选方案,其中,所述定位处理单元由所述无人机本体的处理单元构成;所述相机与所述无人机本体的处理单元电连接。
11、本发明的一个优选方案,其中,所述梳齿的两侧设有多个齿牙,多个齿牙排列的方向与梳齿的长度方向平行。这样,可以增大梳齿对果实的枝条的固定力度,防止果实的枝条在切割时发生滑动,更为有效便捷的裁剪果枝。
12、本发明的一个优选方案,其中,所述切割空间的开口处设有用于防止果实的枝条逃离的闭合机构,该闭合机构包括闭合杆和用于促使闭合杆横在切割空间的开口处的闭合弹簧;
13、所述闭合杆的一端转动连接在位于切割空间一侧的其中一个梳齿上;位于切割空间另一侧的另一个梳齿上设有限位阻挡凸台;在无外力作用的状态下,所述闭合杆的另一端顶在限位阻挡凸台上。通过上述结构,可以有效的防止果树枝在裁剪过程中跑出,以提高采摘效率。
14、本发明的一个优选方案,其中,所述旋转驱动机构包括旋转驱动电机,该旋转驱动电机的输出轴与所述切割轮固定连接。
15、本发明的一个优选方案,其中,所述横向驱动机构包括横向驱动电机和横向传动组件,所述横向驱动电机的壳体固定在梳齿的安装部上;所述横向传动组件包括横向丝杆和横向丝杆螺母;所述横向丝杆螺母与所述旋转驱动机构连接。
16、本发明的一个优选方案,其中,所述收果筐通过安装架与无人机本体连接;所述切枝机构设置在安装架上。
17、本发明的一个优选方案,其中,所述采摘模块还包括用于驱动收果筐相对于无人机本体进行移动的后端驱动机构,该后端驱动机构包括后端驱动电机和后端传动组件,所述后端驱动电机设置在无人机本体上;
18、所述后端传动组件包括传动齿轮和齿条,所述传动齿轮固定连接在后端驱动电机的输出轴上,所述齿条固定设置在无人机本体上;
19、所述收果筐通过可横向滑动的连接结构连接在无人机本体上。通过上述结构,在将果实的母枝插进两个梳齿之间的切割空间后,通过后端驱动电机驱动收果筐相对于无人机本体往前移动,确保果实的母枝到位地位于切割空间中,以适应不同采摘果实距离的需求。
20、进一步,所述可横向滑动的连接结构设有两组,两组可横向滑动的连接结构沿着与后端驱动机构的驱动方向垂直的方向排列;
21、所述可横向滑动的连接结构包括连接滑轨和滑道,所述滑道开设在无人机本体上;
22、所述收果筐上设有两个连接部,所述连接部延伸至所述滑道中;所述连接滑轨固定连接在连接部的顶部;所述连接滑轨的宽度大于滑道的宽度。
23、本发明的一个优选方案,其中,所述采摘模块还包括灵活配重机构,该灵活配重机构包括配重块和用于驱动配重块进行横向移动的配重驱动机构,所述配重驱动机构的驱动方向与所述后端驱动机构的驱动方向的平行。通过上述结构,当收果筐向前移动的同时,通过配重驱动机构驱动配重块向后移动,此时收果筐与配重块呈相对运动的趋势,以实现平衡在摘果过程前端突然增大的重量而导致的无人机平衡性降低的情况。
24、进一步,所述配重驱动机构设置在无人机本体上,该配重驱动机构包括配重驱动电机和配重传动组件;所述配重传动组件包括传动皮带和传动带轮,所述传动带轮设有两个,所述传动皮带套设在两个传动带轮上;所述配重块固定连接在所述传动皮带上。
25、本发明的一个优选方案,其中,所述收果筐上设有输送机构,该输送机构包括输送带和输送驱动机构,所述输送带倾斜地设置在收果筐上。这样,有利于剪枝完成后,通过输送带顺利地将果实输送至收果筐的内部处,便于采摘果实的存储与回收。
26、一种水果采摘无人机的作业方法,包括以下步骤:
27、通过无人机本体搭载采摘模块围绕果树飞行;
28、通过相机对果树进行拍摄,并将获取到的图像传输至定位处理单元中,由定位处理单元对图像进行分析处理,得到水果的相对位置;
29、无人机本体调整自身的位置,使得无人机本体准确飞到待剪果树枝前面,并将切枝梳插向果实的母枝,使得果实的母枝进入两个梳齿之间的切割空间中;
30、通过旋转驱动机构驱动切割轮进行旋转,并通过横向驱动机构驱动切割轮进行横向移动,由切割轮对插在切割空间中的枝条进行切割,将果实带枝切断;在剪枝过程中,切枝梳随着果枝进行转动,确保切枝梳与果枝时刻保持垂直状态,以便顺利完成切割工作;
31、切断后的果实掉落至下方的收集筐中,由收集筐进行统一收集;
32、采摘完设定重量的果实后,无人机本体自主运行到合适的地方降落,以便取出所采摘果实,结束采摘工作。
33、本发明与现有技术相比具有以下有益效果:
34、1、本发明的水果采摘无人机能够对任意位置的水果进行采摘,尤其是位于高处或者背面位置的水果,可以提高荔枝、龙眼等串型水果采摘的自动化水平。
35、2、通过将切枝梳转动连接,在剪枝过程中,可以确保切枝梳与果枝时刻保持垂直状态,以便顺利完成切割工作。
36、3、本发明采用切割轮进行横向切割,区别于刀刃闭合式的剪枝方式,更有新意且能在保持无人机稳定的情况下,更有效率的完成剪枝作业。
- 还没有人留言评论。精彩留言会获得点赞!