一种自适应仿形双刀轴电动微耕机及其控制方法
本发明涉及茶垄除草,具体的,涉及一种自适应仿形双刀轴电动微耕机及其控制方法。
背景技术:
1、茶园杂草种类繁多,发生危害时较严重,尤其是幼龄茶园的地表空间较大,更易生长杂草。茶园杂草既与茶树争地争光争水争肥,影响茶叶的产量和质量,又是传播茶树病虫害的重要中间寄主。茶园除草为茶园田间管理中的一项重要工作。机械除草克服了人工除草效率低和化学除草的污染问题,还具有疏松土壤、提高地温、蓄水保墒的作用,茶园机械化除草已经成为重要的除草方法,是农艺与农机技术的有机结合,茶园除草方法根据机械除草的原理及特点,分为两种类型:机械深松法和机械表土法。
2、机械深松法又称深耕深翻或人工深松,是指在茶树新梢发芽前或发芽后,用农机具、拖拉机或人工进行的茶园土壤耕作作业。机械深松法对土壤扰动小,不影响茶树正常生长,并且能有效控制杂草生长。在我国南方茶园多采用机械深松的方法。
3、我国茶园主要分布在丘陵地带、茶树种植不规范、茶垄间距较小市场上多数除草机宽度大、机器质量大,在茶垄间作业不便,行间和地块间转移不便,对茶园除草机的研发较少。目前,茶园除草普遍采用采用微耕机、田园管理机等机具对茶园进行土壤耕作,可以起到疏松土壤、除去杂草、减少病虫害的作用。当前微耕机具有操作繁琐,在茶蓬间作业不便,人力操纵难度大同时行走速度难以精确控制,除草时间较长等问题。本发明针对现存的问题,研制了一种自适应仿形双刀轴电动微耕机及其控制方法。
技术实现思路
1、本发明的目的在于提供一种自适应仿形双刀轴电动微耕机及其控制方法,解决以下技术问题:
2、如何解决当前微耕机具有操作繁琐,在茶蓬间作业不便,人力操纵难度大同时行走速度难以精确控制,除草时间较长等问题。
3、本发明的目的可以通过以下技术方案实现:
4、一种自适应仿形双刀轴电动微耕机及其控制方法,包括:
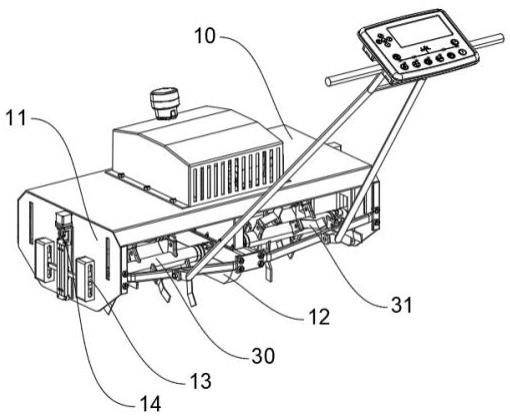
5、机架,所述机架上连接有把手,所述机架两侧设有垂直于水平面的侧护板,所述机架中央设有与所述侧护板平行的安装室;
6、一对传动轴,所述传动轴转动连接在所述安装室上,所述传动轴两端转动连接有第一万向轴,一对所述传动轴由固定在所述机架上的第一驱动结构和第二驱动结构分别驱动转动;
7、刀轴,所述刀轴上固定有若干微耕刀片,所述刀轴一端与所述第一万向轴相连接,所述刀轴另一端连接有伸缩万向轴;
8、移动滑块,所述移动滑块上固定有所述伸缩万向轴,所述移动滑块由设置在所述侧护板上的动力件驱动上下滑动;
9、传感器模块,所述传感器模块包括设置于所述微耕刀片上的压力传感器,以及设置在所述传动轴上的转速传感器;
10、地形探测装置,固定在所述机架前方,包括用于探测地形信息的雷达探头以及获取图像信息的摄像探头;
11、控制器,所述控制器固定在所述把手上,用于控制机架的移动速度,以及一对所述传动轴的转速。
12、通过上述技术方案:在使用茶园垄间除草作业时,可以使双轴旋转方向相反,增加稳定性的同时又增加微耕的作业次数,双电机独立控制,双轴独立控制,可控性更强,相对于传统的单轴微耕机双轴控制在增加作业频率的同时,大大降低了单轴微耕机作业的不稳定性,降低操纵人员的操纵难度,同时仿形结构在茶园垄间作业针对性强,在使用时,可根据不同的垄间形状自适应调节双轴夹角,满足仿形结构,移动上下滑块的位置调整刀轴远离安装箱一端的位置,地面三维激光雷达在作业过程中实时采集垄间地形信息,作业中持续保持刀轴与茶垄间作业面积达到最大,创新性茶垄仿形结构设计较大程度的增强了茶园机械化除草作业效率。
13、作为本发明的进一步技术方案:所述微耕刀片螺旋等间距阵列并通过螺栓固定在刀轴上,相邻所述微耕刀片角度间隔在20-40度之间,且距离间隔在160-190毫米之间,一个所述刀轴的所述微耕刀片数量在5-9片之间,一对所述传动轴上连接刀轴的微耕刀片安装方向相互相反。
14、一种自适应仿形双刀轴电动微耕机的控制方法,其特征在于,包括如下步骤:
15、s1、控制器获得地形探测装置勘测的地形信息,并根据地形信息生成第一工作命令;
16、s2、控制器根据第一工作命令在茶垄除草的行走过程中调整刀轴与茶垄双边的夹角值;
17、s3、控制器根据传感器模块和地形探测装置反馈的数据生成第二工作命令,并根据第二工作命令控制微耕机行走过程的移动速度。
18、所述根据地形信息生成第一工作命令的过程包括:
19、按照地形信息将待除草的区域沿着微耕机移动方向划分为若干相同的分区;
20、获取每个分区的茶垄斜面角度值;
21、根据所述若干分区的茶垄斜面角度值生成第一工作命令,所述第一工作命令用于控制微耕机在分区移动过程中所述刀轴的角度。
22、通过上述技术方案:在获取土地信息后将待除草区域划分为若干个分区,然后在除草过程中对每个分区进行分析,对杂草密度低,不需要仔细除草的区域使用第二速度快速通过,从而从整体上减少除草用时,提升除草效率。
23、作为本发明的进一步技术方案:所述控制微耕机行走过程的移动速度的过程的方式包括:
24、所述一对传动轴反向转动;
25、对微耕机一对所述传动轴的速度比例进行控制调节,调整微耕机工作运动速度。
26、作为本发明的进一步技术方案:所述控制微耕机行走过程的移动速度过程包括:
27、对微耕机即将进入的分区进行分析,判断是否需要进行仔细除草;
28、除草模式,对需要仔细除草的分区,其根据茶垄除草作业以及微耕机作业相关要求确定第一速度,使机架以第一速度进行移动;
29、快速通过模式,对不需要仔细除草的分区,获取大于第一速度的第二速度,使机架以第二速度进行移动。
30、作为本发明的进一步技术方案:所述判断是否需要进行仔细除草的判断过程包括:
31、通过摄像探头获取微耕机即将进入的分区的图像信息;
32、根据图像信息获取即将进入的分区的杂草密度,将杂草密度与预设的标准密度相比较;
33、若杂草密度大于等于预设的标准密度,则需要进行仔细除草;
34、若杂草密度小于预设的标准密度,则不需要进行仔细除草。
35、作为本发明的进一步技术方案:所述第二速度的确定方式包括:
36、通过公式:,获取第二速度;
37、其中,;
38、其中, ;
39、其中,是在标准耕作条件下进行仔细除草的微耕机移动速度,是修正系数,是补偿函数,是密度权重系数,是即将进入的分区的杂草密度,是预设的标准密度,是微耕机在即将进入的分区的前一个分区内除草过程中,刀轴上所有微耕刀片受力大小的算术平均数随着时间的变化曲线,是标准耕作条件下以进行除草的过程中刀轴上所有微耕刀片受力大小的算术平均数随着时间的变化曲线,和是微耕机在即将进入的分区的前一个分区内除草过程中的起始时间点和终止时间点,是取值范围在速度变化系数,通过经验数据确定,是比例系数,通过经验数据确定。
40、本发明的有益效果:
41、(1)本发明在使用茶园垄间除草作业时,可以使双轴旋转方向相反,增加稳定性的同时又增加微耕的作业次数,双电机独立控制,双轴独立控制,可控性更强,相对于传统的单轴微耕机双轴控制在增加作业频率的同时,大大降低了单轴微耕机作业的不稳定性,降低操纵人员的操纵难度。
42、(2)本发明仿形结构在茶园垄间作业针对性强,在使用时,可根据不同的垄间形状自适应调节双轴夹角,满足仿形结构,移动上下滑块的位置调整刀轴远离安装箱一端的位置,地面三维激光雷达在作业过程中实时采集垄间地形信息,作业中持续保持刀轴与茶垄间作业面积达到最大,创新性茶垄仿形结构设计较大程度的增强了茶园机械化除草作业效率。
43、(3)本发明通过在获取土地信息后将待除草区域划分为若干个分区,然后在除草过程中对每个分区进行分析,对杂草密度低,不需要仔细除草的区域使用第二速度快速通过,从而从整体上减少除草用时,提升除草效率。
44、(4)本发明在除草过程中对每个分区进行分析及第二速度确定的过程中,通过仿形的刀轴采集微耕刀片工作时与土壤接触的平均阻力与时间的关系曲线,使用该曲线反应即将前往的下一个除草区域的土壤状态并根据该状态获取第二速度,避免快速通过时使用过高的第二速度。
- 还没有人留言评论。精彩留言会获得点赞!