一种林果园风药双控式变量喷雾装置及变量喷雾方法
本发明涉及农业机械,具体涉及一种林果园风药双控式变量喷雾装置及变量喷雾方法。
背景技术:
1、我国果园分布区域广泛,种植面积与总产量均稳居世界前列。果园植保作业主要用于防治病虫害、花果管理、喷施叶肥和植物生长调节剂等,是果园种植过程中的重要环节。目前我国的植保作业已基本实现了机械化,但是传统施药机械仍存在药液用量大、防治效果差、喷洒不均匀、叶片背面及冠层内部覆盖率低等问题。
2、为实现农药的高效利用,目前的变量喷雾机一般通过传感器实时探测果树的外形轮廓、冠层体积或枝叶密度等参数实现药液的变量喷洒,在一定程度上提高了农药的利用率。但上述方法大多以理想条件下的树行参考中线为基准探测冠层深度,当机具实际行走路线偏离树行参考中线时,会造成冠层深度探测不准,降低变量喷雾的精准性。
3、此外,传统风送式喷雾机大多无法根据果树冠层的生长状况调节风速,风速不足,雾滴难以穿透冠层,风速过大又造成药液飘移严重。且传统风送式喷雾机往往产生固定方向的单一辅助气流,难以形成较强的湍流流场,不利于雾滴穿透枝叶屏蔽到达叶面背面及冠层内部,最终导致喷洒均匀性差、叶片背面和冠层内部覆盖率低。
技术实现思路
1、针对现有技术中存在的不足,本发明的目的是提供一种林果园风药双控式变量喷雾装置及变量喷雾方法,该装置及方法基于自动驾驶机构和激光雷达技术,消除了由于机组在实际作业过程中偏离树行参考中线、导致冠层厚度探测不准、变量喷雾精准性不够和单一风向的辅助气流搅动叶片效果不佳、风速不可调节造成的喷洒均匀性差、药液飘移严重、叶片背面及冠层内部覆盖率低等问题。
2、为解决上述技术问题,本发明提供的技术方案是:
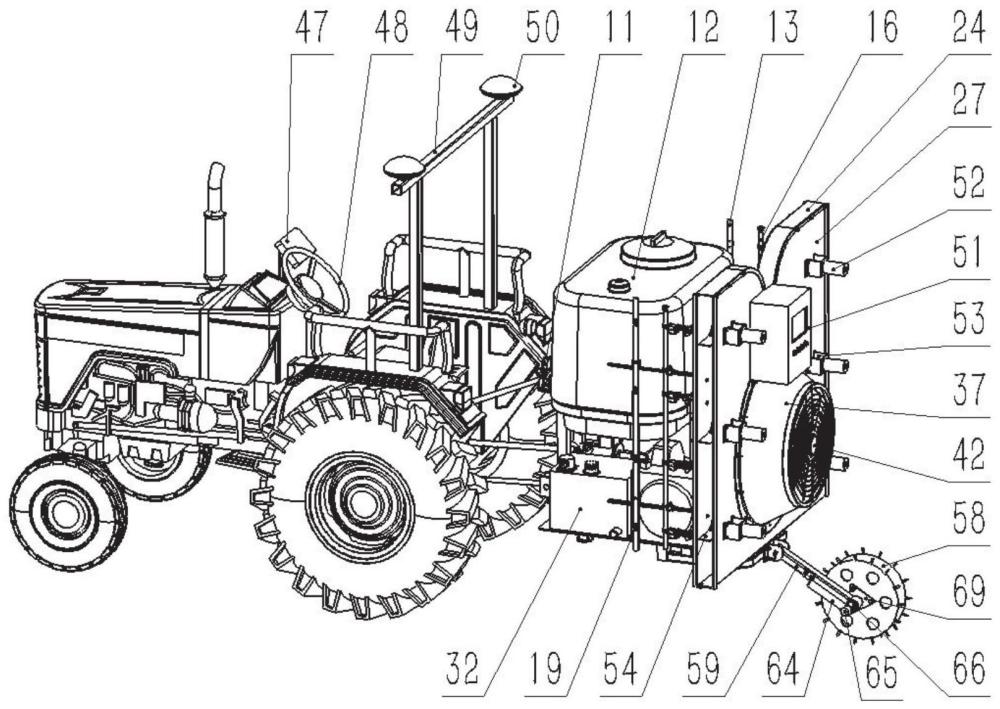
3、所述林果园风药双控式变量喷雾装置包括:机架、变量喷雾机构、风速调节机构、风向搅动机构、自动驾驶机构、仿形测速机构以及电控机构;
4、所述变量喷雾机构包括设置在所述机架顶部的药箱,所述药箱连接有喷杆,所述喷杆上设有电磁阀以及由所述电磁阀控制流量的喷头,所述变量喷雾机构还设置有激光雷达;
5、所述风速调节机构包括扇叶,还包括电磁比例阀;
6、所述风向搅动机构包括驱动电机,所述驱动电机连接有搅动板;
7、所述电控机构包括集成控制器,所述集成控制器根据所述自动驾驶机构提供的树行参考中线和所述激光雷达探测的冠层深度获得冠层叶幕厚度,所述集成控制器还结合自动驾驶机构、仿形测速机构测得的速度信息,计算机组前进速度,所述集成控制器根据获得的叶幕厚度和机组前进速度,计算冠层体积,控制所述电磁阀的占空比;
8、所述集成控制器还将根据设定的果树生长时期和机组前进速度控制电磁比例阀的开度,进而调节扇叶以不同转速旋转;所述扇叶和所述搅动板旋转产生的气流、风场叠加作用于冠层叶片。
9、进一步地,所述药箱底部经药液过滤器连接有药泵,所述药泵经压力传感器连接有调压阀;所述调压阀经流量传感器与所述喷杆底部相连;所述喷杆中部分别连接有若干个电磁阀,每个电磁阀均与一个所述喷头相连通。
10、进一步地,所述风速调节机构包括电磁比例阀、溢流阀、后部导流罩壳、风冷却器、加油过滤器、回油过滤器、油箱、液压马达、液压泵、风机变速箱、吸油过滤器、单向阀、压力表和液位计;所述液压泵的输入轴与药泵的输出轴传动连接,所述液压马达固定连接在机架上,所述液压马达的入口与电磁比例阀的出口连接,液压马达的输出轴传动连接风机变速箱的输入轴,所述风机变速箱的输出轴与扇叶相连;所述电磁比例阀、溢流阀和管路过滤器均固定连接在机架上;所述油箱和风冷却器均固定连接在机架上;所述加油过滤器、回油过滤器、吸油过滤器、单向阀、压力表和液位计集成连接在油箱上。
11、进一步地,所述风向搅动机构的驱动电机连接在后部导流罩壳上并可通过所述电控机构设定转速,驱动电机的输出轴通过搅动联轴器连接有转轴,所述转轴中部通过键连接搅动板,所述驱动电机通过搅动联轴器带动搅动板绕转轴旋转并产生气流。
12、进一步地,所述仿形测速机构包括地轮、地轮管、悬挂支架组合体、销轴、开口销、编码器支架、编码器、测速联轴器、地轮轴承、地轮轴承座、地轮轴和扭簧;所述悬挂支架组合体固定连接在机架上,所述地轮管一端通过套装有扭簧的销轴和开口销固定在悬挂支架组合体上,所述扭簧的一条支腿与悬挂支架组合体的一侧相接触,另一条支腿与地轮管管壁内部相接触;地轮管一端焊接固定有地轮轴承座;内部连接有地轮轴的地轮轴承固定连接在地轮轴承座上;地轮轴的一端固定连接有地轮;所述编码器支架的一端固定连接在地轮管上,另一端连接有编码器;所述测速联轴器的一端与编码器的输出轴相连,另一端与地轮轴相连。
13、进一步地,所述自动驾驶机构包括显控一体机、电动方向盘和卫星天线;所述电动方向盘安装在原拖拉机的方向转轴上,所述显控一体机安装在电动方向盘一侧;卫星天线固定安装在原拖拉机机架上;所述自动驾驶机构可使机组沿着标定轨迹行进,并可实时输出机组的经纬度坐标和前进速度信息。
14、进一步地,一种基于上述林果园风药双控式变量喷雾装置的变量喷雾方法,作业前所述自动驾驶机构沿着每个果树行中线标记直线作业路径,形成树行参考中线并记录存储在集成控制器中;
15、激光雷达探测到果树冠层,集成控制器获取激光雷达获取到的探测深度,并根据作业前标定的树行参考中线实时对探测深度进行修正,获得精准的叶幕厚度;
16、集成控制器将融合自动驾驶机构和仿形测速机构测得的速度信息计算机组前进速度,并根据上述获得的精准叶幕厚度和机组前进速度实时计算果树冠层体积;
17、集成控制器通过实时计算果树冠层体积控制每个电磁阀以对应的占空比工作,实现基于冠层体积的变量喷雾。
18、进一步地,作业前,通过集成控制器上的人机交互界面选择果树的生长时期;
19、所述集成控制器根据设定的果树生长时期和计算的机组前进速度实时调节电磁比例阀的开度,并控制液压马达以不同转速带动扇叶旋转,产生风量和风速适中的辅助气流,以适应当前冠层厚度和作业速度。
20、进一步地,作业中,所述集成控制器实时记录存储机具的作业时间戳、经纬度坐标、机组前进速度、冠层叶幕厚度、喷雾流量、喷雾压力、各电磁阀的占空比、电磁比例阀的开度和搅动板的转速,生成果园不同植保作业时期下的果树冠层信息处方和作业处方,为果园精准管理提供决策参考。
21、本发明产生的有益效果是:
22、(1)利用激光雷达探测果树冠层深度,结合机组前进速度计算冠层体积,通过脉宽调制技术实时调控多路电磁阀的占空比,实现基于冠层体积的变量喷雾,提高了药液的利用率;
23、(2)喷雾机组可根据提前标定好的树行参考中线实时纠正激光雷达的探测深度,并融合自动驾驶机构和仿形机构两种测速方式下的速度数据,通过提高冠层体积的探测精度改善了变量喷雾系统的精准性;
24、(3)作业时,喷雾机组可根据果树的生长时期、冠层的生长状况和实际作业速度灵活调整风速,改善冠层沉积效果并减少飘移;
25、(4)风向搅动机构可有效搅动冠层翻腾并吹起叶片,增加雾滴穿透冠层时所需的湍流动能和输运通道,提高雾滴在叶片背面及冠层内部的沉积覆盖率和均匀性。
- 还没有人留言评论。精彩留言会获得点赞!