一体式莲藕采收清洗机器人的制作方法
本发明涉及一体式莲藕采收清洗机器人,属于莲藕采收清洗。
背景技术:
1、随着我国经济和社会的发展,人们的生活水平逐渐提高,在饮食方面从以前的温饱问题已经过渡到营养问题,而莲藕微甜而脆,可生食也可做菜,而且药用价值相当高,它的根根叶叶,花须果实,无不为宝,都可滋补入药。用莲藕制成粉,能消食止泻,开胃清热,滋补养性,预防内出血,是妇孺童妪、体弱多病者上好的流质食品和滋补佳珍,所以人们对莲藕倍加关注。
2、但是莲藕的采收比较麻烦,莲藕生在淤泥中,人工采收困难,需要一种自动化的莲藕采收机械代替人工进行采收,所以莲藕采收机器人逐渐发展起来。但是,现在的大部分莲藕采收机器人的自动化程度还需进一步提高,采收的速度也需增加,采收机器人的灵活性还需加强,在采摘结束后,还需要手动对这些莲藕进行清洗处理,增大了工作人员的劳动量。
技术实现思路
1、本发明的目的在于提供一体式莲藕采收清洗机器人,本发明结构简单,使用方便,能够自动对莲藕进行采集处理,不仅节省了大量的时间,同时也会提高采摘的效率,并且在采摘结束后,能够对采摘后的莲藕进行清洗,并且能够将清洗后的莲藕打捞出,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
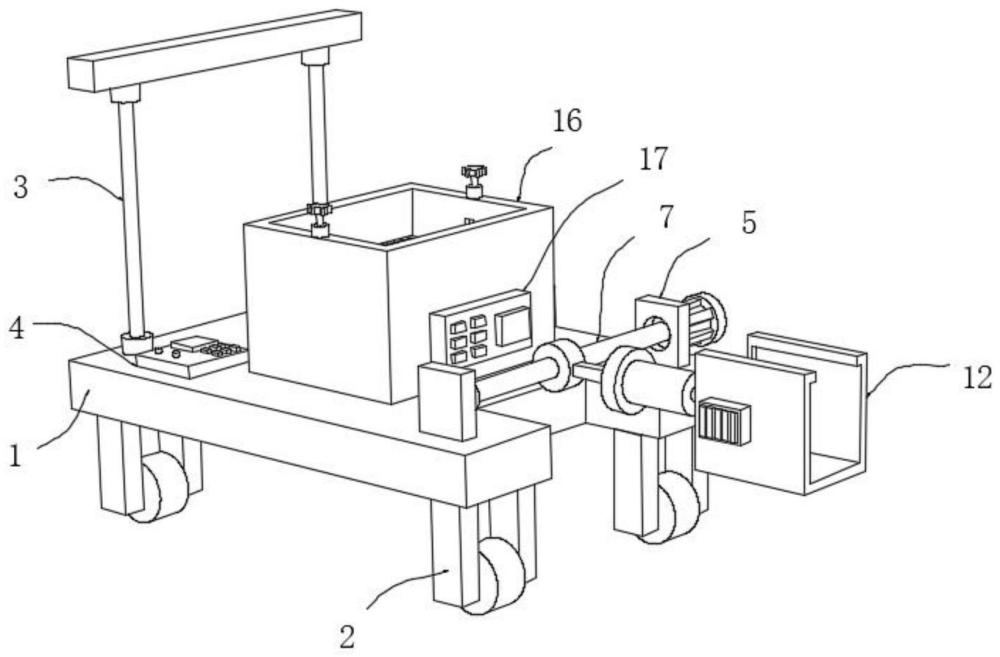
3、一体式莲藕采收清洗机器人,包括运输底座,所述运输底座的底部固定连接有支撑转向轮,所述运输底座的顶部固定连接有把手,所述运输底座的顶部固定连接有控制器,所述运输底座的顶部固定连接有衔接板,所述衔接板的外侧固定安装有电机,所述电机的输出端固定连接有转轴,所述转轴的外侧固定连接有转动圈,所述转动圈的外侧固定连接有连接杆,所述连接杆的外侧固定连接有电动伸缩杆,所述电动伸缩杆的外侧固定连接有推动杆,所述推动杆的外侧固定连接有收集框,所述收集框的外侧固定连接有启动电源,所述收集框的内壁上固定连接有电动气缸,所述电动气缸的外侧固定连接有夹持罩。
4、进一步的,所述运输底座的顶部固定连接有清洗箱,所述清洗箱的外侧固定连接有超声波振动器,所述清洗箱的外侧固定连接有抽取泵,所述清洗箱的内壁中开设有升降槽,所述清洗箱的顶部固定连接有导管,所述导管的内部螺纹连接有旋转杆,所述旋转杆的顶部固定连接有旋转罩,所述旋转杆的底部固定连接有丝杆,所述丝杆的外侧螺纹连接有螺栓,所述螺栓的外侧固定连接有固定杆,所述固定杆的外侧固定连接有过滤板。
5、进一步的,所述支撑转向轮对称分布在运输底座的底部,所述衔接板对称分布在运输底座的顶部。
6、进一步的,所述转轴转动连接在衔接板之间,所述收集框转动圈与连接杆活动连接在运输底座的外侧。
7、进一步的,所述启动电源对称分布在收集框的外侧,所述电动气缸与夹持罩对称分布在收集框的内部。
8、进一步的,所述升降槽对称分布在清洗箱的内部,所述抽取泵与超声波振动器和控制器之间电性连接。
9、进一步的,所述旋转杆通过旋转罩转动连接在导管的内部,所述清洗箱的内壁中为镂空的状态。
10、进一步的,所述丝杆转动连接在清洗箱的内壁中,所述固定杆滑动连接在升降槽的内部,所述过滤板活动连接在清洗箱的内部。
11、本发明的有益效果是:
12、(一)、本发明通过设置了运输底座,首先运输底座通过把手与支撑转向轮的配合使用,从而对运输底座进行移动,这时使运输底座移动到所需要工作的区域,这时通过启动电源,使电机带动转轴进行转动,通过转轴与转动圈的外侧配合使用,从而使连接杆进行转动,由于在连接杆的外侧固定连接有电动伸缩杆,并且收集框固定连接在推动杆的外侧,因此通过转轴的旋转使收集框转动到与地面垂直的角度,这时再通过电动伸缩杆带动推动杆向下进行移动,从而使收集框深入到地下,通过启动电源使电动气缸启动,可以使夹持罩对莲藕进行处理,当夹持结束后,再通过使收集框在转轴的带动下进行转动,使其移动到清洗箱的上方,这时再使夹持罩将莲藕松开,使其掉落到清洗箱的内部,达到了方便采摘的效果。
13、(二)、本发明通过设置了清洗箱,当采摘后的莲藕进入到清洗箱的内部时,通过控制器使超声波振动器启动,可以对清洗箱内部过滤板顶部的莲藕进行清洗,当清洗结束后,通过旋转罩带动旋转杆在导管的内部进行转动,从而使旋转杆带动丝杆在清洗箱的内壁中进行转动,由于在丝杆的外侧螺纹连接有螺栓,并且在螺栓的外侧固定连接固定杆,同时固定杆滑动连接在升降槽的内部,当丝杆带动螺栓旋转时,可以使螺栓在丝杆的外侧进行移动,通过螺栓与固定杆的配合使用,从而使过滤板在清洗箱的内部进行移动,使清洗后的莲藕移出清洗箱的内部,达到了自动清洗的效果。
技术特征:
1.一体式莲藕采收清洗机器人,包括运输底座(1),其特征在于:所述运输底座(1)的底部固定连接有支撑转向轮(2),所述运输底座(1)的顶部固定连接有把手(3),所述运输底座(1)的顶部固定连接有控制器(4),所述运输底座(1)的顶部固定连接有衔接板(5),所述衔接板(5)的外侧固定安装有电机(6),所述电机(6)的输出端固定连接有转轴(7),所述转轴(7)的外侧固定连接有转动圈(8),所述转动圈(8)的外侧固定连接有连接杆(9),所述连接杆(9)的外侧固定连接有电动伸缩杆(10),所述电动伸缩杆(10)的外侧固定连接有推动杆(11),所述推动杆(11)的外侧固定连接有收集框(12),所述收集框(12)的外侧固定连接有启动电源(13),所述收集框(12)的内壁上固定连接有电动气缸(14),所述电动气缸(14)的外侧固定连接有夹持罩(15)。
2.根据权利要求1所述的一体式莲藕采收清洗机器人,其特征在于:所述运输底座(1)的顶部固定连接有清洗箱(16),所述清洗箱(16)的外侧固定连接有超声波振动器(17),所述清洗箱(16)的外侧固定连接有抽取泵(18),所述清洗箱(16)的内壁中开设有升降槽(19),所述清洗箱(16)的顶部固定连接有导管(20),所述导管(20)的内部螺纹连接有旋转杆(21),所述旋转杆(21)的顶部固定连接有旋转罩(22),所述旋转杆(21)的底部固定连接有丝杆(23),所述丝杆(23)的外侧螺纹连接有螺栓(24),所述螺栓(24)的外侧固定连接有固定杆(25),所述固定杆(25)的外侧固定连接有过滤板(26)。
3.根据权利要求1所述的一体式莲藕采收清洗机器人,其特征在于:所述支撑转向轮(2)对称分布在运输底座(1)的底部,所述衔接板(5)对称分布在运输底座(1)的顶部。
4.根据权利要求1所述的一体式莲藕采收清洗机器人,其特征在于:所述转轴(7)转动连接在衔接板(5)之间,所述收集框(12)转动圈(8)与连接杆(9)活动连接在运输底座(1)的外侧。
5.根据权利要求1所述的一体式莲藕采收清洗机器人,其特征在于:所述启动电源(13)对称分布在收集框(12)的外侧,所述电动气缸(14)与夹持罩(15)对称分布在收集框(12)的内部。
6.根据权利要求2所述的一体式莲藕采收清洗机器人,其特征在于:所述升降槽(19)对称分布在清洗箱(16)的内部,所述抽取泵(18)与超声波振动器(17)和控制器(4)之间电性连接。
7.根据权利要求2所述的一体式莲藕采收清洗机器人,其特征在于:所述旋转杆(21)通过旋转罩(22)转动连接在导管(20)的内部,所述清洗箱(16)的内壁中为镂空的状态。
8.根据权利要求2所述的一体式莲藕采收清洗机器人,其特征在于:所述丝杆(23)转动连接在清洗箱(16)的内壁中,所述固定杆(25)滑动连接在升降槽(19)的内部,所述过滤板(26)活动连接在清洗箱(16)的内部。
技术总结
本发明涉及莲藕采收清洗技术领域,特别涉及一体式莲藕采收清洗机器人,包括运输底座,所述运输底座的底部固定连接有支撑转向轮,所述运输底座的顶部固定连接有把手,所述运输底座的顶部固定连接有控制器,所述运输底座的顶部固定连接有衔接板,所述衔接板的外侧固定安装有电机,所述电机的输出端固定连接有转轴,所述转轴的外侧固定连接有转动圈,所述转动圈的外侧固定连接有连接杆,所述连接杆的外侧固定连接有电动伸缩杆,本发明结构简单,使用方便,能够自动对莲藕进行采集处理,不仅节省了大量的时间,同时也会提高采摘的效率,并且在采摘结束后,能够对采摘后的莲藕进行清洗,并且能够将清洗后的莲藕打捞出。
技术研发人员:计素兰,随亮
受保护的技术使用者:安徽民意美农业科技有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!