一种蟹类立体养殖污物处理方法及系统
本发明涉及水产养殖,特别是涉及一种蟹类立体养殖污物处理方法及系统。
背景技术:
1、蟹类立体养殖增加了单位面积蟹的养殖数量,也增加了单位面积饵料的投喂量,相应地也带来污物产出增多问题。污物主要包括蟹的排泄物和残余饵料,若得不到及时清理容易引起水质快速恶化,造成养殖蟹死亡。目前传统的解决方法是吸污设备全天运转或定时运转,全天运转模式水体不间断流动,并不适合养殖蟹生长,且运行成本高;定时运转模式虽然节省成本,但是养殖蟹不同生长周期产出污物不同,无法保证有效清除。因此,亟需开发一种蟹类立体养殖中污物智能处理方法及系统,根据养殖蟹不同养殖周期污物的数量智能处理,做到精准控制的同时降低运行成本。
技术实现思路
1、本发明的目的是提供一种蟹类立体养殖污物处理方法及系统,通过检测每次投喂后不同时间点污物的类别和数量,自动开启和停止吸污装置,并提高投喂精度,减少污物产出量。
2、为实现上述目的,本发明提供了如下方案。
3、一种蟹类立体养殖污物处理方法,包括以下步骤。
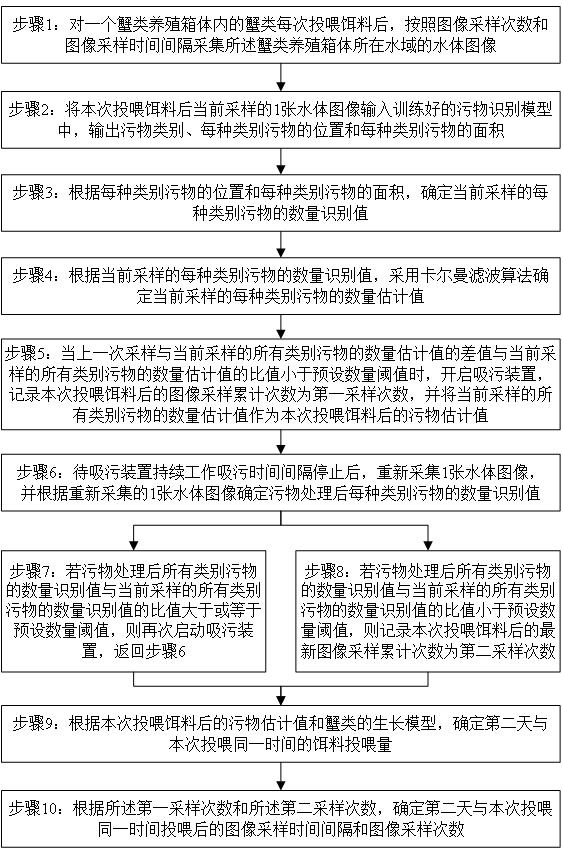
4、对一个蟹类养殖箱体内的蟹类每次投喂饵料后,按照图像采样次数和图像采样时间间隔采集所述蟹类养殖箱体所在水域的水体图像。
5、将本次投喂饵料后当前采样的1张水体图像输入训练好的污物识别模型中,输出污物类别、每种类别污物的位置和每种类别污物的面积。
6、根据每种类别污物的位置和每种类别污物的面积,确定当前采样的每种类别污物的数量识别值。
7、根据当前采样的每种类别污物的数量识别值,采用卡尔曼滤波算法确定当前采样的每种类别污物的数量估计值。
8、当上一次采样与当前采样的所有类别污物的数量估计值的差值与当前采样的所有类别污物的数量估计值的比值小于预设数量阈值时,开启吸污装置,记录本次投喂饵料后的图像采样累计次数为第一采样次数,并将当前采样的所有类别污物的数量估计值作为本次投喂饵料后的污物估计值。
9、待吸污装置持续工作吸污时间间隔停止后,重新采集1张水体图像,并根据重新采集的1张水体图像确定污物处理后每种类别污物的数量识别值。其中,所述吸污时间间隔由所述图像采样时间间隔确定。
10、若污物处理后所有类别污物的数量识别值与当前采样的所有类别污物的数量识别值的比值大于或等于预设数量阈值,则再次开启吸污装置,返回执行待吸污装置持续工作吸污时间间隔停止后,重新采集1张水体图像,并根据重新采集的1张水体图像确定污物处理后每种类别污物的数量识别值的步骤。
11、若污物处理后所有类别污物的数量识别值与当前采样的所有类别污物的数量识别值的比值小于预设数量阈值,则记录本次投喂饵料后的最新图像采样累计次数为第二采样次数。
12、根据本次投喂饵料后的污物估计值和蟹类的生长模型,确定第二天与本次投喂同一时间的饵料投喂量。
13、根据所述第一采样次数和所述第二采样次数,确定第二天与本次投喂同一时间投喂后的图像采样时间间隔和图像采样次数。
14、可选地,对一个蟹类养殖箱体内的蟹类每次投喂饵料后,按照图像采样次数和图像采样时间间隔采集所述蟹类养殖箱体所在水域的水体图像,之前还包括:全天实时检测每一个蟹类养殖箱体所在水域的水体浊度;根据每次投喂后经预设时间段后实时检测的水体浊度,当at-a0>b时,开启吸污装置,直到at-a0<c时,控制吸污装置停止工作;其中,at为每次投喂后经预设时间段后的t采样时刻检测的水体浊度,a0为根据蟹类不同的生长期设定的浊度标准值,b为吸污装置开始工作时的浊度阈值,c为吸污装置停止工作时的浊度阈值。
15、可选地,全天实时检测每一个蟹类养殖箱体所在水域的水体浊度,之后还包括:每间隔一个小时,计算每一个蟹类养殖箱体的相邻四个蟹类养殖箱体所在水域的水体浊度的平均值am;若am>2(b-c)/3,则开启吸污装置,直到am<c时,控制吸污装置停止工作。
16、可选地,根据当前采样的每种类别污物的数量识别值,采用卡尔曼滤波算法确定当前采样的每种类别污物的数量估计值,具体包括:以采集水体图像的摄像头正下方为坐标原点,记录每种类别污物中面积最大的实例中心位置坐标、最大实例面积以及每种类别污物中所有实例的面积和;当污物为剩余饵料时,分别计算每种类别剩余饵料中面积最大的实例中心位置与投喂点的距离di;若di <q且si /ci ≥3,则判定投喂的饵料有堆叠,且依据公式计算每种类别剩余饵料的数量估计值;其中,q为饵料投喂范围,si为第i种类别剩余饵料的最大实例面积,ci为第i种类别剩余饵料的参考面积,mi为第i种类别剩余饵料的数量估计值,bi为第i种类别剩余饵料的类别系数,si为第i种类别剩余饵料的最大实例面积,wi为第i种类别剩余饵料的实例的面积和;依据公式mr=brwr,计算剩余饵料以外的每种类别污物的数量估计值;式中,mr为当前采样的剩余饵料以外的第r种类别污物的数量识别值,br为剩余饵料以外的第r种类别污物的类别系数,wr为剩余饵料以外的第r种类别污物的面积。
17、可选地,所述当前采样的每种类别污物的数量估计值的计算公式为:;式中,为第k次采样的所有类别污物的数量估计值向量,为第k-1次采样的所有类别污物的数量估计值向量,为第k次采样的所有类别污物的数量识别值向量。
18、可选地,当上一次采样与当前采样的所有类别污物的数量估计值的差值与当前采样的所有类别污物的数量估计值的比值小于预设数量阈值时,开启吸污装置,具体包括:当时,开启吸污装置;式中,和分别为第k次采样和第k-1次采样的所有类别污物的数量识别值向量,为的模,为与相减后的模,l为预设数量阈值。
19、可选地,所述吸污时间间隔为t-e;式中,t为图像采样时间间隔,e为水体恢复平静的缓冲时间。
20、可选地,根据本次投喂饵料后的污物估计值和蟹类的生长模型,确定第二天与本次投喂同一时间的饵料投喂量,具体包括以下子步骤。
21、根据本次投喂饵料后的污物估计值,依据公式,计算本次投喂实际饵料消耗量的估计值;式中,为本次实际投喂量,为本次投喂饵料后剩余饵料的估计值,,m1为第1种类别剩余饵料的数量估计值,m2为第2种类别剩余饵料的数量估计值,m3为第3种类别剩余饵料的数量估计值,mi为第i种类别剩余饵料的数量估计值。
22、根据蟹类的生长模型,依据公式,确定本次需要投喂量的先验状态估计;式中,为第j天本次需要投喂量的先验状态估计,为第j-1天本次需要投喂量的后验状态估计,为状态矩阵,为输入矩阵,为第j-1天输入向量。
23、依据公式,计算先验状态估计误差协方差矩阵;式中,为第j天先验状态估计误差协方差矩阵,为第j-1天后验状态估计误差协方差矩阵,为过程噪声的协方差矩阵,为状态矩阵的转置。
24、根据先验状态估计误差协方差矩阵,依据公式,计算卡尔曼增益;式中,kj为第j天卡尔曼增益,hm为观测矩阵,为观测矩阵的转置,rc为测量噪声的协方差矩阵。
25、根据本次投喂实际饵料消耗量的估计值、本次需要投喂量的先验状态估计和卡尔曼增益,依据公式,计算本次需要投喂量的后验状态估计;式中,为第j天本次需要投喂量的后验状态估计,为第j天本次投喂实际饵料消耗量的估计值。
26、根据卡尔曼增益,依据公式,计算后验状态估计误差协方差矩阵;式中,为第j天后验状态估计误差协方差矩阵。
27、根据后验状态估计误差协方差矩阵更新先验状态估计误差协方差矩阵,获得更新后的先验状态估计误差协方差矩阵。
28、计算更新后的本次需要投喂量的先验状态估计,并将更新后的本次需要投喂量的先验状态估计确定为第二天与本次投喂同一时间的饵料投喂量。
29、可选地,根据所述第一采样次数和所述第二采样次数,确定第二天与本次投喂同一时间投喂后的图像采样时间间隔和图像采样次数,具体包括:根据所述第一采样次数和所述第二采样次数,依据公式tnew=(e-s-1)t,确定第二天与本次投喂同一时间投喂后的图像采样时间间隔tnew;式中,e为第二采样次数,s为第一采样次数,t为图像采样时间间隔;根据第二天与本次投喂同一时间投喂后的图像采样时间间隔tnew,取小于d/tnew的最大正整数为第二天与本次投喂同一时间投喂后的图像采样次数;其中,d为第二天与本次投喂同一时间至下一次投喂的时间段时长。
30、一种蟹类立体养殖污物处理系统,包括以下模块。
31、图像采集模块,用于对一个蟹类养殖箱体内的蟹类每次投喂饵料后,按照图像采样次数和图像采样时间间隔采集所述蟹类养殖箱体所在水域的水体图像。
32、识别模块,用于将本次投喂饵料后当前采样的1张水体图像输入训练好的污物识别模型中,输出污物类别、每种类别污物的位置和每种类别污物的面积。
33、数量识别模块,用于根据每种类别污物的位置和每种类别污物的面积,确定当前采样的每种类别污物的数量识别值。
34、数量估计模块,用于根据当前采样的每种类别污物的数量识别值,采用卡尔曼滤波算法确定当前采样的每种类别污物的数量估计值。
35、吸污开启模块,用于当上一次采样与当前采样的所有类别污物的数量估计值的差值与当前采样的所有类别污物的数量估计值的比值小于预设数量阈值时,开启吸污装置,记录本次投喂饵料后的图像采样累计次数为第一采样次数,并将当前采样的所有类别污物的数量估计值作为本次投喂饵料后的污物估计值。
36、吸污停止模块,用于待吸污装置持续工作吸污时间间隔停止后,重新采集1张水体图像,并根据重新采集的1张水体图像确定污物处理后每种类别污物的数量识别值;其中,所述吸污时间间隔由所述图像采样时间间隔确定。
37、循环模块,用于若污物处理后所有类别污物的数量识别值与当前采样的所有类别污物的数量识别值的比值大于或等于预设数量阈值,则再次开启吸污装置,调用吸污停止模块。
38、记录模块,用于若污物处理后所有类别污物的数量识别值与当前采样的所有类别污物的数量识别值的比值小于预设数量阈值,则记录本次投喂饵料后的最新图像采样累计次数为第二采样次数。
39、投喂量确定模块,用于根据本次投喂饵料后的污物估计值和蟹类的生长模型,确定第二天与本次投喂同一时间的饵料投喂量。
40、采样确定模块,用于根据所述第一采样次数和所述第二采样次数,确定第二天与本次投喂同一时间投喂后的图像采样时间间隔和图像采样次数。
41、根据本发明提供的具体实施例,本发明公开了以下技术效果。
42、本发明实施例的一种蟹类立体养殖污物处理方法及系统,通过检测每次投喂后不同时间点污物的类别和数量,自动开启和停止吸污装置;使用卡尔曼滤波算法对污物估计值不断迭代,污物估计值接近真值的可信度高;且融合当次污物产生量和基于生长模型的投喂量得到第二天的实际投喂量,提高投喂精度,可以有效减少饵料浪费,降低成本。
- 还没有人留言评论。精彩留言会获得点赞!