一种全自动杀鱼去鳞装置
1.本发明属于水产品加工处理技术领域,具体涉及一种全自动杀鱼去鳞装置。
背景技术:
2.鱼的营养价值体现在它富含丰富的蛋白质、硫胺素、尼克酸、核黄素、脂肪、维生素d、钙元素、铁元素、磷元素等矿物质,对人体的健康十分有益。鱼所含有的蛋白是优质蛋白,能补益人体的需要,增强人体的体质,所含有脂肪多为不饱和脂肪酸,具有较好的对抗动脉硬化的作用,对预防心脑血管疾病有好处,并且,经常食用鱼可以促进骨骼发育,预防骨质疏松。但鱼鳞较为密集坚硬,难以处理。因此,在买卖鱼类时会对其进行去鳞操作,现有的去鱼鳞方式一般为人工操作和小型机器处理;人工具体操作为:一只手固定鱼类,另一只手使用刀来回刮削鱼鳞,而小型机器处理操作为:双手抓住鱼身将鱼放进进鱼口,通过机器内的毛刺摩擦达到去鳞的目的。此类方法虽然在一定程度上满足了对鱼类去鳞的要求,但是存在以下几点不足:第一,鱼类鱼鳞密集且坚硬,不管是人工还是机器操作,去鳞操作难度大,工作效率低,并且去鳞效果不佳,影响观感和口感;第二,鱼类加工处理效率低。无论是人工处理还是机器加工,一次只能处理一条鱼;第三,自动化程度低。目前市面上存在的杀鱼去鳞装置仍需要人工进行操作,大多数是半自动化机器;第四,安全性低。双手直接接触刀具易损伤人的机体(手指、手臂等),同时长时间的人工去鳞在一定程度上对人体产生疲劳累积损伤;第五,容易污染环境。操作过程中没有考虑到去除的鱼鳞的收集环节,去除的鱼鳞污染环境。因此设计一种快速高效,安全卫生且去鳞质量高的适合于大规模加工处理的全自动杀鱼去鳞装置很有必要也势在必行。
3.本
技术实现要素:
4.本发明的目的是提供一种全自动杀鱼去鳞装置,解决了现有技术中存在的杀鱼去鳞去皮效率低、功能单一、自动化程度低,且无法保证去鳞安全卫生的问题。
5.本发明所采用的技术方案是:一种全自动杀鱼去鳞装置,包括设置在最前方的鱼类视觉分拣机构,贯穿整个装置的链条模具送料装置,沿链条模具送料装置前进方向设置有沿上下运动去鳞装置,上下运动去鳞装置与链条模具送料装置镶嵌安装,上下运动去鳞装置把模具上的鱼从上下两个方向夹紧,上下运动去鳞装置后面设置有可替换内脏去除装置,循环水结构设置在整个装置下方。
6.本发明的特点还在于,
7.鱼类视觉分拣机构的具体结构为:包括设置在底板上的两个支撑台,两个支撑台之间设置有鱼箱,并且每个支撑台上均设置有机械手臂,机械手臂前端安装有手爪,用来夹取待杀的鱼,手爪附近均设置有摄像头,摄像头与控制器连接,同时摄像头和机械手臂之间通过连接件连接。
8.链条模具送料装置的具体结构为:包括通过螺栓连接在底板上的机架,机架前端设有轴承座a、轴承座b,机架后端设有轴承座c和轴承座d,每个轴承座都通过螺栓与机架连接在一起,轴承座a、轴承座b通过轴a连接链轮a、链轮b,链轮a与轴承座a配合安装,链轮b与
轴承座b配合安装,轴承座c、轴承座d通过轴b连接链轮c、链轮d,轴承座c与链轮c配合安装,轴承座d与链轮d配合安装,轴b上链轮c所在一端的v带轮b与电机a的v带轮a通过皮带连接,链轮a和链轮c之间、链轮b和链轮d之间均设置有链条,两条链条之间铺设有两组并排模具,两组并排的模具通过合页与链条连接在一起,并排的两组模具表面均匀开设有若干中空的内凹结构,内凹结构的形状类似一个鱼的形状,模具下面均匀铺设有若干细铁丝,细铁丝呈网状铺设,细铁丝横穿过内凹结构的底部,链条与模具的结合形成链条模具送料装置,链条模具送料装置与上下运动去鳞装置镶嵌。
9.上下运动去鳞装置的具体结构为:包括通过螺栓连接在机架上的竖直支撑板a、竖直支撑板d,以及与竖直支撑板d相向设计的竖直支撑板b、与竖直支撑板a相向设计的竖直支撑板c,分别设计在链条模具送料装置两侧,其中,竖直支撑板a和竖直支撑板d,竖直支撑板a和竖直支撑板c的上侧之间设置有宽水平支撑板a,下侧设置有窄水平支撑板a,竖直支撑板d与竖直支撑板b的上侧之间设置有宽水平支撑板b,下侧设置有窄水平支撑板b,竖直支撑板在面对所述上下运动去鳞装置的一侧的竖直方向上设置有滑槽,同时,水平运动板a、水平运动板b设计有滑槽形状的凹陷,水平运动板a、水平运动板b通过螺栓连接两个侧壁a,侧壁a设计为中空机构,设置高压水回路,一端与水管连接,两个侧壁a中间水平设计有毛刷a、毛刷b、毛刷c、毛刷d、履带a,毛刷表面覆有毛刺设计用来增加摩擦,并且,毛刷a、毛刷b、毛刷c、毛刷d、履带a均通过轴连接在侧壁上,且一端均设有v带轮,位于所述链条模具送料装置的下方水平设置有毛刷a、毛刷b、毛刷c、毛刷d、履带b,毛刷a、毛刷b、毛刷c、毛刷d、履带b均通过轴连接在侧壁上,且一端均设有v带轮,履带a、履带b中间均设有按板,机架下方、模具链条正下方处安装有电机b,电机b的输出轴通过v带连接侧壁一端的v带轮,毛刷a、毛刷b、毛刷c、毛刷d、履带b与位于上方的毛刷a、毛刷b、毛刷c、毛刷d、履带a一一上下对齐设置,毛刷a、毛刷b、毛刷c、毛刷d、履带b均位于所述链条模具送料装置形成的传输带内部,毛刷a、毛刷b、毛刷c、毛刷d、履带a的下表面直接与模具上的鱼接触,毛刷a、毛刷b、毛刷c、毛刷d、履带b通过所述模具上的内凹结构的开孔与鱼接触,所述上下运动去鳞装置的上层结构的侧壁下表面设置有压力传感器,压力传感器与控制器连接;所述宽水平支撑板a与窄水平支撑板a所成面的同一侧通过螺栓设置有丝杠a和丝杠c,宽水平支撑板b与窄水平支撑板b所成面的同一侧通过螺栓设置有丝杠b、丝杠d,四个丝杠上方设置为固定端,中间为圆柱形的滑动部分,下方设置为支撑端,丝杠a、丝杠c的顶部与电机a、电机c连接,丝杠b、丝杠d的顶部与电机b、电机d连接,由四个电机为四个丝杠的上下运动提供动力,电机a、电机b、电机c、电机d均配设有减速机,设计水平运动板a、水平运动板b通过滑槽带动上下运动去鳞机构做上下运动,且水平运动板a、水平运动板b外侧设有圆柱形缺口,丝杠滑动部分设计为圆柱形,与水平运动板a、水平运动板b的圆柱形缺口连接,实现水平运动板、上部去鳞机构的整体上下运动。
10.毛刷a、毛刷b、毛刷c、毛刷d、毛刷a、毛刷b、毛刷c、毛刷d上均开设有小孔,毛刷内部通过水管与水箱连接。
11.可替换内脏去除装置的具体结构为:包括四个矩形导轨和间歇机构,导轨a、导轨c通过缺口插入宽水平支撑板a,导轨b、导轨d通过缺口插入在宽水平支撑板b下方,导轨a、导轨c通过螺栓连接窄水平支撑板a,导轨b、导轨d通过螺栓连接窄水平支撑板b,其中,两个宽水平支撑板均是面对内侧方向,在板下方设有缺口,两组导轨设计有梯形槽口且上下封闭,
上下按压压片、刀片、旋转伸缩刀尾部均设计为截面为梯形的梯形连接部,梯形连接部与梯形槽口匹配,刀片与旋转伸缩刀可在导轨上上下滑动,旋转伸缩刀为长条圆柱体,表面设有小孔和毛刺,旋转伸缩刀头部连接手爪,并且刀片和旋转伸缩刀与梯形连接部的连接处上下均设置有弹簧;
12.间歇机构设置在机架上,位于装置右侧导轨a正下方,间歇机构设计有拨盘和槽轮,拨盘通过轴连接v带轮c,且通过带连接电机b,电机b为间歇机构提供动力。
13.循环水结构具体为:包括放置在整个装置下面的筛网装置,筛网装置从上至下依次水平设有两层滤网,筛网装置底部通过水管与水箱连接,水箱内设置有水泵,水泵与控制器连接。
14.底板的底部四角均设置有万向轮。
15.本发明的有益效果是,提供一种全自动杀鱼去鳞装置,将鱼鳞的去除,鱼类内脏的处理,鱼鳞的收集及去鳞和去除内脏之后的鱼的清洗等操作一气呵成,不仅自动化程度高、去鳞去内脏效率高,并能满足多样化处理需求;去鳞采用带有毛刷的连续快速旋转的辊筒,在链条模具中间布置了三组去鳞毛刷,实现类似手工连续作业的鱼鳞去除操作,由于去鳞毛刷的连续快速旋转,三组去鳞毛刷将会实现和模仿完全类似手工连续作业的鱼鳞去除操作,实现高速有效地去除鱼鳞;上下运动毛刷去鳞机构的上下运动距离是通过压力传感器和丝杠与毛刷机构的连接实现,精准有效地控制去鳞毛刷机构的高度,使得不同大小的鱼类在去鳞装置紧密结合,保证去鳞效果;设计模具传送鱼,实现可更换不同大小的模具,以适应不同大小的鱼类去鳞处理的需求,保证机构的功能性和应用适用性;间歇机构的加入实现对鱼类内脏去除操作的把控,与去鳞装置连接的上下按压压片随着去鳞装置而上下运动,有效地控制刀片与旋转伸缩刀的高度,实现的对鱼类内脏的剥离和捣碎;并且设有冲洗装置,毛刷和旋转伸缩刀类似狼牙棒结构并且是中空结构,中间设置高压水回路,通过毛刷、旋转伸缩刀旋转和中间高压水的带压力的冲洗实现对鱼类内脏的清除和清洗,提高食品卫生性;整个装置自动化程度高,操作简单,安全卫生,快速高效,应用广泛,可满足消费者的多种需求。
附图说明
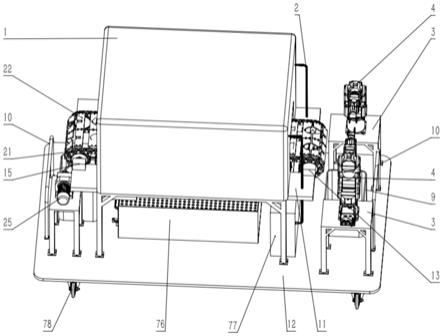
16.图1是本发明一种全自动杀鱼去鳞装置整体结构示意图;
17.图2是本发明一种全自动杀鱼去鳞装置分拣机构示意图;
18.图3是本发明一种全自动杀鱼去鳞装置分拣机构局部放大示意图;
19.图4是本发明一种全自动杀鱼去鳞装置链条模具送料机构俯视示意图;
20.图5是本发明一种全自动杀鱼去鳞装置链条模具送料机构示意图;
21.图6是本发明一种全自动杀鱼去鳞装置上下运动去鳞机构示意图;
22.图7是本发明一种全自动杀鱼去鳞装置上下运动去鳞机构上下去鳞局部放大示意图;
23.图8是本发明一种全自动杀鱼去鳞装置上下运动去鳞机构中毛刷局部放大示意图;
24.图9是本发明一种全自动杀鱼去鳞装置可替换去内脏机构示意图;
25.图10是本发明一种全自动杀鱼去鳞装置可替换去内脏机构局部放大示意图;
26.图11是本发明一种全自动杀鱼去鳞装置循环水资源机构示意图;
27.图12是本发明一种全自动杀鱼去鳞装置链条模具送料结构与上下运动去鳞机构镶嵌示意图;
28.图13是本发明一种全自动杀鱼去鳞装置可替换去内脏机构和履带的局部放大示意图;
29.图14是本发明一种全自动杀鱼去鳞装置上下运动去鳞机构上部结构局部放大示意图;
30.图15是本发明一种全自动杀鱼去鳞装置循环水资源机构局部放大示意图。
31.图中,1.外壁,2.水管,3.支撑台,4.机械手臂,5.连接件,6.摄像头,7.圆形连接件,8.手爪,9.鱼箱,10.扶手把,11.机架,12.底板,13.轴承座a,14.轴承座b,15.轴承座c,16.轴承座d,17.链轮a,18.链轮b,19.链轮c,20.链轮d,21.链条,22.模具,23.轴a,24.轴b,25.电机a,26.v带轮a,27.v带轮b,28.竖直支撑板a,29.竖直支撑板b,30竖直支撑板c,31.竖直支撑板d,32.宽水平支撑板a,33.宽水平支撑板b,34.窄水平支撑板a,35.窄水平支撑板b,36.水平运动板a,37.水平运动版b,38.滑槽,39.侧壁a,40.侧壁b,41.毛刷a,42.毛刷b,43.毛刷c,44.毛刷d,45.履带a,46.毛刷a,47.毛刷b,48.毛刷c,49.毛刷d,50.履带b,51.丝杠a,52.丝杠b,53.丝杠c,54.丝杠d,55.电机a,56.电机b,57.电机c,58.电机d,59.导轨a,60.导轨b,61.导轨c,62.导轨d,63.刀片,64.旋转伸缩刀,65.手爪,66.上下按压压片,67.梯形槽口,68.弹簧,69.小孔,70.毛刺,71.间歇机构,72.拨盘,73.槽轮,74.v带轮c,75.电机b,76.筛网装置,77.水箱,78.万向轮,79.压力传感器,80.按板,81.水泵。
具体实施方式
32.下面结合附图和具体实施方式对本发明进行详细说明。
33.本发明一种全自动杀鱼去鳞装置,如图1所示,包括设置在最前方的鱼类视觉分拣机构,贯穿整个装置的链条模具送料装置,沿链条模具送料装置前进方向设置有沿上下运动去鳞装置,上下运动去鳞装置与链条模具送料装置镶嵌安装,上下运动去鳞装置把模具22上的鱼从上下两个方向夹紧,上下运动去鳞装置后面设置有可替换内脏去除装置,循环水结构设置在整个装置下方。
34.之所以设置去鳞装置可以上下运动主要是为了使得不同大小的鱼类在去鳞装置紧密结合,保证去鳞效果。在去除鱼鳞的过程中,放置在模具22上的鱼,通过与其上下两面接触的上下两个去鳞毛刷的连续旋转,模拟类似用人手持毛刷的去鳞操作,用以实现鱼鳞的去除操作,为了保证鱼鳞的去除效果,本技术在链条模具中间布置了三组去鳞毛刷,实现类似手工连续作业的鱼鳞去除操作,由于去鳞毛刷的连续快速旋转,三组去鳞毛刷将会实现和模仿完全类似手工连续作业的鱼鳞去除操作,并且效果明显要优于手工去鳞操作。去鳞完毕后,链条模具送料装置将已去除鱼鳞的鱼类送至可替换内脏去除装置,可替换内脏去除装置通过间歇结构71驱动,当鱼被送至可替换内脏去除装置时,间歇机构71使得运输装置短暂停止运动,去鳞以后的鱼类可做短暂停留,在可替换内脏去除装置通过安装其中的刀片63和旋转伸缩刀64的共同作用,割破鱼类肚子,清除鱼类内脏。旋转伸缩刀64外置毛刺70,类似狼牙棒结构并且是中空结构,中间设置高压水回路,通过旋转伸缩刀64旋转和中间高压水的带压力的冲洗实现对鱼类内脏的清除和清洗。狼牙棒状的旋转刀具实现的对鱼
类内脏的剥离和捣碎,高压水对已经剥离的鱼类内脏进行冲洗。循环水结构设置在整个装置下方,可通过水泵81将水箱77中的水抽取到水管2,将水分别运送到杀鱼去鳞装置的上方水管、侧壁、毛刷和旋转伸缩刀等其他可能使用水的位置,水箱77设有两层过滤网,用于对水进行过滤。过滤后的水可重复进入水箱77,重新使用,去除的鱼鳞置于筛网上,循环水结构实现对鱼鳞的收集处理,并且实现对水资源的循环使用。
35.结合图1~图3,鱼类视觉分拣机构的具体结构为:包括设置在底板12上的两个支撑台3,两个支撑台3之间设置有鱼箱9,并且每个支撑台3上均设置有机械手臂4,机械手臂4前端安装有手爪8,用来夹取待杀的鱼,手爪8附近均设置有摄像头6,摄像头6与控制器连接,同时摄像头6和机械手臂4之间通过连接件5连接。鱼类视觉分拣机构首先通过摄像头6识别鱼的位置与鱼肚子的方向,随后手爪8进行对鱼的分拣和在链条模具送料装置中的放置,为了保证后续去鳞和内脏处理的方便,鱼类视觉分拣机构设置放置鱼类规则,使放置在链条模具送料装置中鱼的朝向一致,即鱼肚子朝向割破鱼肚子刀口方向,用以方便实现后续可替换内脏机构对鱼类肚子的割破处理。
36.如图2、图3、图7所示,所述链条模具送料装置的具体结构为:包括通过螺栓连接在底板12上的机架11,机架11前端设有轴承座a13、轴承座b14,机架后端设有轴承座c15和轴承座d16,每个轴承座都通过螺栓与机架11连接在一起,轴承座a13、轴承座b14通过轴a23连接链轮a17、链轮b18,链轮a17与轴承座a13配合安装,链轮b18与轴承座b14配合安装,轴承座c15、轴承座d16通过轴b24连接链轮c19、链轮d20,轴承座c15与链轮c19配合安装,轴承座d16与链轮d20配合安装,轴b24上链轮c19所在一端的v带轮b27与电机a25的v带轮a26通过皮带连接,电机a25为链条模具送料机构提供动力,链轮a17和链轮c19之间、链轮b18和链轮d20之间均设置有链条21,用以承载鱼并向前传送鱼类,两条链条21分别与链轮配合形成完整的闭环,链条21通过配合链轮转动,实现对鱼的传输,两条链条21之间铺设有两组并排模具22,两组并排的模具22通过合页与链条21连接在一起,并排的两组模具22表面均匀开设有若干中空的内凹结构,内凹结构的形状类似一个鱼的形状,模具22下面均匀铺设有若干细铁丝,细铁丝呈网状铺设,细铁丝横穿过内凹结构的底部,用以承载鱼类,此模块设计可根据鱼类的大小更换使用不同的模具22,链条21与模具22的结合形成链条模具送料装置,链条模具送料装置与上下运动去鳞装置镶嵌。放置有鱼一侧的链条模具位于上下运动去鳞装置的上、下层中间,上下运动去鳞装置中的上、下两层可以夹链条模具送料机构中的鱼类,用以实现鱼类在去鳞操作时的不滑动。
37.如图5、图7、图10、图12所示,所述上下运动去鳞装置的具体结构为:包括通过螺栓连接在机架11上的竖直支撑板a28、竖直支撑板d31,以及与竖直支撑板d31相向设计的竖直支撑板b29、与竖直支撑板a28相向设计的竖直支撑板c30,分别设计在链条模具送料装置两侧,其中,竖直支撑板a28和竖直支撑板d31,竖直支撑板a28和竖直支撑板c30的上侧之间设置有宽水平支撑板a32,下侧设置有窄水平支撑板a34,竖直支撑板d31与竖直支撑板b29的上侧之间设置有宽水平支撑板b33,下侧设置有窄水平支撑板b35,竖直支撑板在面对所述上下运动去鳞装置的一侧的竖直方向上设置有滑槽38,同时,水平运动板a36、水平运动板b37设计有滑槽形状的凹陷,之所以设置滑槽38,是用来实现上部去鳞机构在竖直方向的上下运动,水平运动板a36、水平运动板b37通过螺栓连接两个侧壁a39,侧壁a39设计为中空机构,设置高压水回路,一端与水管2连接,两个侧壁a39中间水平设计有毛刷a41、毛刷b42、毛
刷c43、毛刷d44、履带a45,其中,毛刷表面均设计为带有小孔69和毛刺70,侧壁连接装置上方的水管2,通过毛刷轴内中空空隙,从小孔69喷出,用来清洗鱼,毛刷表面覆有毛刺70设计用来增加摩擦,并且,毛刷a41、毛刷b42、毛刷c43、毛刷d44、履带a45均通过轴连接在侧壁上,且一端均设有v带轮,位于所述链条模具送料装置的下方水平设置有毛刷a46、毛刷b47、毛刷c48、毛刷d49、履带b50,毛刷a46、毛刷b47、毛刷c48、毛刷d49、履带b50均通过轴连接在侧壁上,且一端均设有v带轮,履带a45、履带b 50中间均设有按板80,保证履带可以夹紧鱼身,机架11下方、模具链条正下方处安装有电机b75,电机b75的输出轴通过v带连接侧壁一端的v带轮,为上下运动去鳞机构提供动力,毛刷a46、毛刷b47、毛刷c48、毛刷d49、履带b50与位于上方的毛刷a41、毛刷b42、毛刷c43、毛刷d44、履带a45一一上下对齐设置,毛刷a46、毛刷b47、毛刷c48、毛刷d49、履带b50均位于所述链条模具送料装置形成的传输带内部,毛刷a41、毛刷b42、毛刷c43、毛刷d44、履带a45的下表面直接与模具上的鱼接触,毛刷a46、毛刷b47、毛刷c48、毛刷d49、履带b50通过所述模具22上的内凹结构的开孔与鱼接触,所述上下运动去鳞装置的上层结构的侧壁下表面设置有压力传感器79,压力传感器79与控制器连接;当鱼运送进来时,上下运动去鳞机构的上层结构上下运动,上部结构运动的力达到可夹紧鱼身的力度,压力传感器79发挥作用,压力传感器79采集到一定的重力信号,将信号传给控制器,控制器控制电机停止转动,不再为丝杠提供动力,丝杠与水平运动板保持此时的位置,上层毛刷可根据压力传感器而运动,确保上层的毛刷a41、毛刷b42、毛刷c43、毛刷d44、履带a45压紧鱼。所述宽水平支撑板a32与窄水平支撑板a34所成面的同一侧通过螺栓设置有丝杠a51和丝杠c53,宽水平支撑板b33与窄水平支撑板b35所成面的同一侧通过螺栓设置有丝杠b52、丝杠d54,四个丝杠上方设置为固定端,中间为圆柱形的滑动部分,下方设置为支撑端,丝杠a51、丝杠c53的顶部与电机a55、电机c57连接,丝杠b52、丝杠d54的顶部与电机b56、电机d58连接,由四个电机为四个丝杠的上下运动提供动力,电机a55、电机b56、电机c57、电机d58均配设有减速机,设计水平运动板a36、水平运动板b37通过滑槽带动上下运动去鳞机构做上下运动,且水平运动板a36、水平运动板b37外侧设有圆柱形缺口,丝杠滑动部分设计为圆柱形,与水平运动板a36、水平运动板b37的圆柱形缺口连接,实现水平运动板、上部去鳞机构的整体上下运动。其中,压力传感器79将信号传递给控制器,控制器调控丝杠上下移动的距离,保证上层运动去鳞机构夹紧鱼身,该装置中的压力传感器17是以压电效应为工作原理的传感器,其敏感元件由压电材料制作而成,当压电材料受到外力作用时,其表面形成了电荷,电荷通过电荷放大器测量电路的放大以及变换阻抗以后,就会被转换成为与所受到的外力成正比关系的电量输出,控制器控制压力传感器79及四个丝杠和四个电机,实现当受力的大小一定时,控制丝杠不再继续向下运动,此时电机a55、电机b56、电机c57、电机d58不再提供动力,上、下两层的毛刷去鳞结构中间镶嵌模具链条结构,当鱼运送进来,压力传感器发挥作用,上层毛刷根据压力传感器而运动,确保上层毛刷压紧鱼,此时上下两层结构的运动由丝杠上的电机提供动力,四组毛刷同速率转动,实现对鱼鳞的有效去除。
38.结合图10~图15,毛刷a46、毛刷b47、毛刷c48、毛刷d49、毛刷a41、毛刷b42、毛刷c43、毛刷d44上均开设有小孔69,毛刷内部通过水管2与水箱77连接,去鳞的同时进行清理,保证鱼类加工处理过程的安全卫生。
39.可替换内脏去除装置的具体结构为:包括四个矩形导轨和间歇机构,导轨a59、导
轨c61通过缺口插入宽水平支撑板a32,导轨b60、导轨d62通过缺口插入在宽水平支撑板b33下方,导轨a59、导轨c61通过螺栓连接窄水平支撑板a34,导轨b60、导轨d62通过螺栓连接窄水平支撑板b35,其中,两个宽水平支撑板均是面对内侧方向,在板下方设有缺口,两组导轨设计有梯形槽口67且上下封闭,上下按压压片66、刀片63、旋转伸缩刀64尾部均设计为截面为梯形的梯形连接部,梯形连接部与梯形槽口匹配,刀片63与旋转伸缩刀64可在导轨上上下滑动,旋转伸缩刀64为长条圆柱体,表面设有小孔69和毛刺70,旋转伸缩刀64头部连接手爪65,并且刀片63和旋转伸缩刀64与梯形连接部的连接处上下均设置有弹簧68;上下按压压片66可插入设计在侧壁上面的缺口,实上现下按压压片66随着上下运动去鳞机构的上层部分而上下移动,当上下按压压片66向下运动时,弹簧68受力向下压缩,与弹簧68连接的刀63、旋转伸缩刀64受力向下运动,之所以设置梯形槽口、与弹簧连接的刀片和旋转伸缩头是为了实现割破鱼肚子时,刀片始终处于鱼肚子的位置,
40.间歇机构71设置在机架11上,位于装置右侧导轨a59正下方,间歇机构71设计有拨盘72和槽轮73,拨盘72通过轴连接v带轮c74,且通过带连接电机b75,电机b75为间歇机构71提供动力。当去除鱼鳞的鱼被链条21送至去内脏的位置时,因为上下按压压片66与上层去鳞机构连接,鱼在去内脏的整个过程中同样处于被夹紧状态,该装置设计通过弹簧68的调节可保证刀片63以及旋转伸缩刀64的位置恰当,刀片63“守株待兔”,履带压紧传送鱼身,通过履带的压紧及链条21的传送力量实现鱼肚子的割破,然后间歇机构71发挥作用,装置停止,旋转伸缩刀64柱体旋转,表面毛刺70增加摩擦,同时通过手爪65伸缩去除鱼的内脏,且旋转伸缩刀64设有小孔69,该结构通过水泵81从循环水结构中抽取水箱77中的水,利用循环水资源,通过水管将水运输至小孔处,实现对鱼的第二次清洗处理,此结构设计刀片63、旋转伸缩刀64及上下按压压片66,上述刀片63、旋转伸缩刀64及上下按压压片66通过螺栓连接,零件皆可替换,实现设备的可更换性能保障。
41.循环水结构具体为:包括放置在整个装置下面的筛网装置76,筛网装置76从上至下依次水平设有两层滤网,筛网装置76底部通过水管2与水箱77连接,水箱77内设置有水泵81,水泵81与控制器连接。被处理后的鱼鳞经过第一层筛网的过滤会留存在第一层筛网上面,而清洗后的水会依次经过第一层网筛和第二层网筛后流至装置底部,控制器通过控制水泵81抽取最后一层的水至水箱77中,供给去鳞、去内脏以及整个装置清洗时的水资源需求,实现了对水资源的循环使用。
42.底板12的底部四角均设置有万向轮78。
43.本发明是一种全自动杀鱼去鳞装置,工作原理如下:
44.当操作者将鱼放入鱼箱中,机械手臂4使用夹爪夹取鱼,加以摄像头识别鱼的放置方向,确保鱼被同一方向地放置在模具22中,此上下运动去鳞装置与链条模具送料装置镶嵌安装,做上下运动的去鳞装置把模具22上的鱼从上下两个方向夹紧,使得不同大小的鱼类在去鳞装置紧密结合,然后,电机b75开始旋转并带动链条21向前移动,此时四个丝杠根据力传感器51的作用控制上层毛刷去鳞结构毛刷a41、毛刷b42、毛刷c43、毛刷d44运动至贴近鱼身的位置,电机a55、电机b56、电机c57、电机d58为两组丝杠提供运动动力,电机b75控制着多组毛刷辊筒,毛刷a46、毛刷b47、毛刷c48、毛刷d49、毛刷a41、毛刷b42、毛刷c43、毛刷d44同速率转动,放置在模具上的鱼,通过与其上下两面接触的上下两个去鳞毛刷的连续旋转,模拟类似用人手持毛刷的去鳞操作,用以实现鱼鳞的去除操作,实现类似手工连续作业
的鱼鳞去除操作,由于去鳞毛刷的连续快速旋转,三组去鳞毛刷将会实现和模仿完全类似手工连续作业的鱼鳞去除操作,同时,连接水管的毛刷中设有的小孔69随着旋转转动,小孔69中流出水流,冲洗鱼身,电机b75继续旋转带动被去除鱼鳞之后的鱼向前传输,上下按压压片66与上层毛刷去鳞机构镶嵌,保证刀片63和旋转伸缩刀64的适当位置,此时刀片63和旋转伸缩刀64“守株待兔”,依靠电机b75带动链条21向前运输的力量和履带a 45、履带b 50的夹紧力量实现鱼肚子的割破操作,此时间歇机构71使得运输装置短暂停止运动,去鳞以后的鱼类可做短暂停留,在可替换内脏去除装置通过安装其中的刀片63和旋转伸缩刀64的共同作用,割破鱼类肚子,清除鱼类内脏,并且,与旋转伸缩刀64外置毛刺,类似狼牙棒结构并且是中空结构,中间设置高压水回路,通过旋转伸缩刀64旋转和中间高压水的带压力的冲洗实现对鱼类内脏的清除和清洗。狼牙棒状的旋转刀具实现的对鱼类内脏的剥离和捣碎,高压水对已经剥离的鱼类内脏进行冲洗,处理过的鱼鳞掉落至筛网装置76,两层过滤后的水储存在筛网装置76下层,可重新循环到水箱77中,实现水资源的循环。首先,装置的模具22可根据鱼类形状的不同更改大小;其次,多组毛刷去鳞机构实现鱼鳞的有效去除,故本去鳞机的实用性是毋庸置疑的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1