语音控制吻合器的方法和吻合器与流程
[0001]
本申请实施例涉及医疗器械技术领域,具体涉及语音控制吻合器的方法和吻合器。
背景技术:
[0002]
在外科手术中,医用吻合器已成为人体组织缝合过程中的必不可少的辅助医疗器械。随着医学的发展和产品研发,越来越多功能的各种吻合器类产品应用于临床,适用范围已涉及到胃肠外科、肝胆外科、胸外科、泌尿外科、普外科、妇科等各个领域,成为医生必不可少的工具之一。医用吻合器的应用具有手术中出血较少、手术时间较短、可减少手工操作误差、避免感染、术后功能恢复快等诸多优点。
[0003]
现有的吻合器系统通常通过手动或电动控制来激发推刀移动或缝钉的缝合,尤其是需要长时间频繁切割或缝合的一些复杂精细的手术中,操作者会因手部疲劳而影响手术的效果。
技术实现要素:
[0004]
本申请实施例提出了语音控制吻合器的方法和吻合器,来解决以上背景技术部分提到的技术问题。
[0005]
第一方面,本申请实施例提供了一种语音控制吻合器的方法,该方法包括:接收声音采集设备发送的语音信号,其中,语音信号是声音采集设备采集操作人员的语音生成的信号;对语音信号进行识别,得到识别结果;响应于确定识别结果为表征使吻合器包括的推刀组件执行动作的信息,基于识别结果,控制吻合器包括的动作执行装置带动推刀组件执行相应的动作。
[0006]
在一些实施例中,接收声音采集设备发送的语音信号,其中,语音信号是声音采集设备采集操作人员的语音生成的信号;对语音信号进行识别,得到识别结果;响应于确定识别结果为表征使吻合器包括的推刀组件执行动作的信息,基于识别结果,控制吻合器包括的动作执行装置带动推刀组件执行相应的动作。
[0007]
在一些实施例中,至少一个电机包括推刀激发电机;以及基于识别结果,从至少一个电机中确定目标电机,以及生成与识别结果对应的控制指令,包括:响应于确定识别结果表征使推刀组件包括的刀头执行切割缝合操作,确定推刀激发电机为目标电机,以及生成第一控制指令,其中,第一控制指令用于使推刀激发电机带动刀头闭合并使推刀组件前进,以使刀头进行切割缝合操作。
[0008]
在一些实施例中,至少一个电机包括推刀组件旋转电机;以及基于识别结果,从至少一个电机中确定目标电机,以及生成与识别结果对应的控制指令,包括:响应于确定识别结果表征使推刀组件执行旋转操作,确定推刀组件旋转电机为目标电机,以及生成第二控制指令,其中,第二控制指令用于使推刀组件旋转电机带动推刀组件旋转第一目标角度。
[0009]
在一些实施例中,生成第二控制指令,包括:响应于确定识别结果包括用于表征推
刀组件的旋转角度的角度信息,基于角度信息确定第一目标角度,以及生成第二控制指令。
[0010]
在一些实施例中,至少一个电机包括刀头开闭控制电机;以及基于识别结果,从至少一个电机中确定目标电机,以及生成与识别结果对应的控制指令,包括:响应于确定识别结果表征使推刀组件包括的刀头执行开闭操作,确定刀头开闭控制电机为目标电机,以及生成第三控制指令,其中,第三控制指令用于使刀头开闭控制电机带动刀头张开或闭合。
[0011]
在一些实施例中,至少一个电机包括组件摆向电机;以及基于识别结果,从至少一个电机中确定目标电机,以及生成与识别结果对应的控制指令,包括:响应于确定识别结果表征使推刀组件包括的刀头执行摆向操作,确定组件摆向电机为目标电机,以及生成第四控制指令,其中,第四控制指令用于使组件摆向电机带动刀头摆动第二目标角度。
[0012]
在一些实施例中,该方法还包括:响应于确定识别结果表征使至少一个电机停止,生成用于使至少一个电机停止的第五控制指令。
[0013]
第二方面,本申请实施例提供了一种吻合器,该吻合器包括:驱动柄、主控制器、推刀组件、动作执行装置和声音采集装置;主控制器和动作执行装置设置在驱动柄内部,动作执行装置、声音采集装置分别与主控制器连接;主控制器用于执行上述第一方面中任一实施例描述的方法。
[0014]
在一些实施例中,动作执行装置包括以下至少一个电机:推刀激发电机、推刀组件旋转电机、刀头开闭控制电机、组件摆向电机。
[0015]
本申请实施例提供的语音控制吻合器的方法和吻合器,通过接收声音采集设备采集的语音信号,对语音信号进行识别,进而基于识别结果,控制吻合器的推刀组件执行相应的动作,从而缓解了手术操作者手部疲劳,减少了因手部疲劳对手术效果的影响。
附图说明
[0016]
通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本申请的其它特征、目的和优点将会变得更明显:
[0017]
图1是根据本申请的吻合器的系统架构示意图;
[0018]
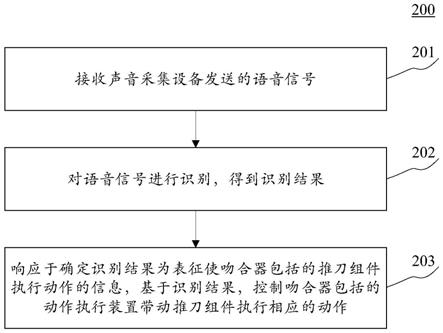
图2是根据本申请的语音控制吻合器的方法的一个实施例的流程图;
[0019]
图3是根据本申请的吻合器包括的至少一个电机的示例性示意图;
[0020]
图4是根据本申请的吻合器的一个实施例的结构示意图。
具体实施方式
[0021]
下面结合附图和实施例对本申请作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与有关发明相关的部分。
[0022]
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本申请。
[0023]
图1示出了可以应用本申请的语音控制吻合器的方法的示例性系统架构100。
[0024]
如图1所示,系统架构100可以包括主控制器101、推刀组件102、动作执行装置103和声音采集装置104。其中,主控制器101与声音采集装置104和动作执行装置103电连接,用于从声音采集装置104接收采集的语音信号,并对语音信号进行识别,基于识别结果控制动
作执行装置执行相应的动作。推刀组件102与动作执行装置103配合连接,动作执行装置103可以带动推刀组件执行相应的动作(例如切割、旋转、摆动、缝合、夹紧等)。
[0025]
上述主控制器101可以是具有信号处理功能的各种电子设备,包括但不限于微处理芯片、单板计算机、膝上型便携计算机、台式计算机、平板电脑等等。
[0026]
声音采集设备104可以通过有线或无线连接的方式与主控制器101连接。例如,声音采集设备可以是微型麦克风。
[0027]
需要说明的是,本申请实施例所提供的语音控制吻合器的方法一般由主控制器101执行。
[0028]
继续参考图2,图2示出了本申请的语音控制吻合器的方法一个实施例的流程200,该方法包括以下步骤:
[0029]
步骤201,接收声音采集设备发送的语音信号。
[0030]
在本实施中,用于执行语音控制吻合器的方法的执行主体(例如图1所示的主控制器)可以通过有线连接方式或无线连接方式接收声音采集设备(例如图1所示的声音采集设备104)发送的语音信号。其中,语音信号是声音采集设备采集操作人员的语音生成的信号。
[0031]
步骤202,对语音信号进行识别,得到识别结果。
[0032]
在本实施中,上述执行主体可以对语音信号进行识别,得到识别结果。具体地,上述执行主体可以采用现有的语音识别方法对接收的语音信号进行识别。例如,可以对语音信号进行识别,得到文字作为识别结果。或者,提取语音信号的频率成分作为识别结果。
[0033]
可选的,吻合器可以包括声音输出装置,例如蜂鸣器。当上述执行主体识别语音信号失败时,可以控制上述声音输出装置输出用于表征语音识别失败的提示音。
[0034]
步骤203,响应于确定识别结果为表征使吻合器包括的推刀组件执行动作的信息,基于识别结果,控制吻合器包括的动作执行装置带动推刀组件执行相应的动作。
[0035]
在本实施中,上述执行主体可以响应于确定识别结果为表征使吻合器包括的推刀组件执行动作的信息,基于识别结果,控制吻合器包括的动作执行装置带动推刀组件执行相应的动作。具体地,作为示例,上述执行主体或与上述执行主体通信连接的其他电子设备可以预先存储有表征识别结果与用于控制动作执行装置执行相应动作的指令的对应关系的对应关系表。在该对应关系表中,可以存储有多个识别结果(例如,可以包括但不限于文字、数字、符号等信息)和与识别结果对应的指令。上述执行主体可以将所生成的识别结果与上述对应关系表中存储的识别结果进行对比,将上述对应关系表中的与所生成的识别结果相同或相似(例如识别结果为文字时,识别出的文字的与对应关系表中的文字的拼音相同但音调不同,可以确定为相似)的识别结果对应的指令确定为目标指令,根据目标指令,控制动作执行装置执行相应的动作。例如,动作执行装置可以带动推刀组件的刀头进行夹紧、转动、向前推进等动作。
[0036]
上述动作执行装置可以包括各种基于电信号进行运动的装置,例如,步进电机、电动推杆等。
[0037]
在本实施例的一些可选的实现方式中,动作执行装置103包括至少一个电机。其中,每个电机可以按照各种方式与推刀组件配合连接,例如,通过齿轮、皮带、链条、螺杆等方式配合连接。
[0038]
上述执行主体可以基于识别结果,按照如下步骤控制动作执行装置带动推刀组件
执行相应的动作:
[0039]
首先,基于识别结果,从至少一个电机中确定目标电机,以及生成与识别结果对应的控制指令。其中,目标电机是待基于识别结果执行相应动作的电机。上述执行主体可以按照识别结果与电机的对应关系,从至少一个电机中确定与所确定的识别结果对应的电机作为目标电机。作为示例,上述执行主体可以从预设的对应关系表中查找与上述识别结果对应的电机的编号,基于该编号,确定目标电机。例如,假设识别结果为文字“夹紧”,则确定用于控制推刀组件的刀头夹紧或放松的电机作为目标电机。
[0040]
然后,基于控制指令,控制目标电机带动推刀组件执行相应的动作。具体地,控制指令与识别结果的对应关系可以预先建立。例如,假设识别结果为文字“夹紧”,控制指令可以为用于使上述目标电机带动推刀组件的刀头进行夹紧的动作的指令。控制指令的形式可以包括但不限于以下至少一种:数字信号指令、模拟电压或电流指令、高低电平指令等。
[0041]
在本实施例的一些可选的实现方式中,如图3所示,至少一个电机包括推刀激发电机1031。上述执行主体可以基于识别结果,按照如下步骤从至少一个电机中确定目标电机,以及生成与识别结果对应的控制指令:
[0042]
响应于确定识别结果表征使推刀组件102包括的刀头1021执行切割缝合操作,确定推刀激发电机1031为目标电机,以及生成第一控制指令。其中,第一控制指令可以用于使推刀激发电机1031带动刀头闭合并使推刀组件前进,以使刀头进行切割缝合操作,还可以用于使推刀组件后退。作为示例,假设识别结果包括文字“切割”,则生成第一控制指令以使推刀组件向前移动进行切割,并带动推进组件包括的缝钉进行缝合。示例性的,推刀激发电机1031可以与推刀组件通过齿轮、链条、螺杆等方式配合连接,从而带动推刀组件前后移动。
[0043]
在本实施例的一些可选的实现方式中,如图3所示,至少一个电机包括推刀组件旋转电机1032。
[0044]
上述执行主体可以基于识别结果,按照如下步骤从至少一个电机中确定目标电机,以及生成与识别结果对应的控制指令:
[0045]
响应于确定识别结果表征使推刀组件执行旋转操作,确定推刀组件旋转电机1032为目标电机,以及生成第二控制指令。其中,第二控制指令用于使推刀组件旋转电机1032带动推刀组件旋转第一目标角度。作为示例,假设识别结果包括文字“旋转”,则生成第二控制指令以使推刀组件旋转。示例性的,推刀组件旋转电机1032可以与推刀组件通过齿轮、螺杆等方式配合连接,从而带动推刀组件沿推刀组件的刀杆轴向旋转。上述第一目标角度可以基于识别结果确定。
[0046]
在本实施例的一些可选的实现方式中,如图3所示,上述执行主体可以响应于确定识别结果包括用于表征推刀组件的旋转角度的角度信息,基于角度信息确定第一目标角度,以及生成第二控制指令。例如,识别结果可以包括文字“顺时针旋转45度”,则生成第二控制指令以使推刀组件顺时针旋转45度。
[0047]
可选地,当识别结果不包括角度信息时,可以生成第二控制指令以使推刀组件以预设速度旋转预设角度(即第一目标角度)。
[0048]
在本实施例的一些可选的实现方式中,如图3所示,至少一个电机包括刀头开闭控制电机1033。
[0049]
上述执行主体可以基于识别结果,按照如下步骤从至少一个电机中确定目标电机,以及生成与识别结果对应的控制指令:
[0050]
响应于确定识别结果表征使推刀组件包括的刀头执行开闭操作,确定刀头开闭控制电机1033为目标电机,以及生成第三控制指令。其中,第三控制指令用于使刀头开闭控制电机1033带动刀头张开或闭合。作为示例,假设识别结果包括文字“张开”,则生成第三控制指令以使刀头张开。示例性的,刀头开闭控制电机1033可以与刀头通过齿轮、链条、螺杆等方式配合连接,从而带动刀头张开或闭合。
[0051]
在本实施例的一些可选的实现方式中,如图3所示,至少一个电机包括组件摆向电机1034。
[0052]
上述执行主体可以基于识别结果,按照如下步骤从至少一个电机中确定目标电机,以及生成与识别结果对应的控制指令:
[0053]
响应于确定识别结果表征使推刀组件包括的刀头执行摆向操作,确定组件摆向电机1034为目标电机,以及生成第四控制指令,其中,第四控制指令用于使组件摆向电机1034带动刀头摆动第二目标角度。假设识别结果包括文字“向左摆动”,则生成第四控制指令令以使刀头摆动(即刀头的延伸方向离开推刀组件的刀杆的轴向)。示例性的,组件摆向电机1034可以与刀头通过齿轮、螺杆等方式配合连接,从而带动刀头摆动。上述第一目标角度可以是刀头的延伸方向与推刀组件的刀杆的轴向的夹角。上述第一目标角度可以基于识别结果确定。
[0054]
可选的,上述执行主体可以响应于确定识别结果包括用于表征刀头的摆动角度的角度信息,基于角度信息确定第二目标角度,以及生成第四控制指令。例如,识别结果可以包括文字“向左摆动45度”,则生成第二控制指令以使推刀组件向左摆动45度。
[0055]
可选地,当识别结果不包括角度信息时,可以生成第四控制指令以使推刀组件以预设速度摆动预设角度(即第二目标角度)。
[0056]
在本实施例的一些可选的实现方式中,上述执行主体还可以响应于确定识别结果表征使至少一个电机停止,生成用于使至少一个电机停止的第五控制指令。作为示例,上述执行主体可以从识别结果中确定待使其停止的电机。例如,识别结果可以包括文字“停止所有电机”,则生成第五控制指令,以使所有的电机停止运行。再例如,假设当前正在运行的电机为推刀激发电机,当前的识别结果包括文字“停止”,则生成第五控制指令,以使推刀激发电机停止移动。
[0057]
本申请的上述实施例提供的方法,通过接收声音采集设备采集的语音信号,对语音信号进行识别,进而基于识别结果,控制吻合器的推刀组件执行相应的动作,从而缓解了手术操作者手部疲劳,减少了因手部疲劳对手术效果的影响。
[0058]
进一步参考图4,其示出了本申请的吻合器的一个实施例的结构示意图。该吻合器包括:驱动柄401、主控制器402、推刀组件403、动作执行装置404和声音采集装置405。
[0059]
主控制器402和动作执行装置404设置在驱动柄401内部,动作执行装置404、声音采集装置405分别与主控制器402连接。主控制器402用于执行上述图2对应实施例中描述的方法。需要说明的是,声音采集装置405可以设置于驱动柄401上(即驱动柄401集成了声音采集装置405),也可以设置于其他设备上(例如通过有线或无线连接方式,将声音采集装置与控制器建立通信连接)。
[0060]
在本实施例的一些可选的实现方式中,动作执行装置包括以下至少一个电机:推刀激发电机4041、推刀组件旋转电机4042、刀头开闭控制电机4043、组件摆向电机4044。
[0061]
本申请实施例提供的吻合器,通过在吻合器上设置声音采集装置,丰富了控制吻合器的方式,减少了手动控制吻合器造成的操作人员的疲劳,有助于提高手术效果。
[0062]
以上描述仅为本申请的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本申请中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离上述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本申请中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1