移动注射设备及其作业方法与流程
1.本发明涉及农业领域,更具体地涉及一移动注射设备及其作业方法。
背景技术:
2.养殖业随着养殖技术的进步,需求的上升,开始规模化。但是疫病对养殖业的发展规模和速度产生制约。
3.一般为了防止牲畜产生疫病,需要对牲畜进行药物注射,以保障牲畜的健康。药物注射需要在短时间内完成,规模化的养殖场中,药物注射量大,及时、有效地完成药物注射对于防止疫病十分重要。但是目前主要通过人工对牲畜进行药物注射,这对较大规模的养殖场来说,效率有限。药物注射,时间紧,任务量大,如果人员数量少,则无法及时完成任务,有可能导致疫病产生。但是配备足够的人员,又产生较大的人工成本,这对养殖场也是一种负担。
4.此外,药物注射的剂量要正确,剂量不足,可能药物效果不足,剂量过大,对牲畜健康可能产生不利影响。因此,人工注射需要正确把握剂量,这对经验不足的工人是一种考验。且注射时,可能由于剂量把控不准确,导致药物效果不足,或者对牲畜健康造成损害。此外,工人进入养殖区牲畜进行药物注射,人员进出可能会将病菌带入养殖区,损害牲畜监控,也可能携带养殖区的细菌,对人体造成不利影响。
5.因此人工为牲畜注射药物存在一定的问题。
技术实现要素:
6.本发明的一个优势在于提供一移动注射设备及其作业方法,所述移动注射设备代替人工对牲畜进行药物注射。
7.本发明的另一个优势在于提供一移动注射设备及其作业方法,所述移动注射设备可以被安装于圈养设施的上方空间,不对圈养设施的环境造成影响。
8.本发明的另一个优势在于提供一移动注射设备及其作业方法,所述移动注射设备包括一移动装置和一作业装置,所述作业装置被所述移动装置驱动以被调整在水平面的位置,可以为不同位置的牲畜注射药物。
9.本发明的另一个优势在于提供一移动注射设备及其作业方法,所述移动装置包括一纵向移动设施和一横向移动设置,以引导所述作业装置沿纵向和横向移动,进而被调整在水平面的位置。
10.本发明的另一个优势在于提供一移动注射设备及其作业方法,所述作业装置可以被调整垂直方向的位置,以被调整高度,接近需要注射的目标对象,在移动过程中从上向下移动,避免被干扰。
11.本发明的另一个优势在于提供一移动注射设备及其作业方法,通过一视觉模块对所述目标对象的位置进行识别,以使所述作业装置接近所述目标对象,实现自动跟踪。
12.本发明的另一个优势在于提供一移动注射设备及其作业方法,通过一管理模块建
立至少一作业任务,以自动控制所述作业装置按照所述作业任务作业,以有效减少作业失误。
13.本发明的另一个优势在于提供一移动注射设备及其作业方法,所述作业装置识别所述目标对象的信息,以判断所述目标对象是否正确,避免作业失误。
14.本发明的另一个优势在于提供一移动注射设备及其作业方法,通过所述管理模块远程控制所述作业装置,以表面人员对牲畜的环境和健康造成影响。
15.本发明的另一个优势在于提供一移动注射设备及其作业方法,根据所述作业任务确定药物注射的正确剂量,由所述作业装置自动注射,避免剂量错误。
16.本发明的另一个优势在于提供一移动注射设备及其作业方法,所述作业装置对所述目标对象的注射位置进行消毒,以保障注射安全和卫生。
17.本发明的另一个优势在于提供一移动注射设备及其作业方法,所述移动注射设备可以随时、全天候工作,根据牲畜情况自动择机注射,可以提高注射有效率。
18.本发明的另一个优势在于提供一移动注射设备及其作业方法,通过一视觉模块监控牲畜状态,以自动根据牲畜状态选择合适的药物进行注射,实现药物注射的智能化。
19.本发明的其它优势和特点通过下述的详细说明得以充分体现并可通过所附权利要求中特地指出的手段和装置的组合得以实现。
20.依本发明的一个方面,能够实现前述目的和其他目的和优势的本发明的一移动注射设备,为一目标对象作业,包括:
21.一移动装置;和
22.一作业装置,所述作业装置被可移动地安装于所述移动装置,其中所述移动装置驱动所述作业装置,以使所述作业装置接近该目标对象,为该目标对象注射药物。
23.根据本发明的一个实施例,其中所述作业装置包括至少一机械臂,所述机械臂的一端被可驱动地连接于所述移动装置,所述移动装置驱动所述机械臂移动,以调整所述机械臂的位置。
24.根据本发明的一个实施例,所述作业装置包括一执行模块,所述执行模块被设置于所述机械臂的另一端,所述执行模块随着所述机械臂的移动被调整位置。
25.根据本发明的一个实施例,所述作业装置包括一调整模块,所述调整模块可控制地连接于所述机械臂,其中所述调整模块调整所述机械臂的高度和姿态,以调整所述执行模块和该目标对象的相对位置。
26.根据本发明的一个实施例,所述执行模块包括一读取单元,所述读取单元被设置于所述机械臂的一端,以随着所述机械臂的调整被移动至该目标对象的一标签,其中所述读取单元感应该目标对象的标签以识别该目标对象是否正确。
27.根据本发明的一个实施例,所述执行模块包括一作业单元,所述作业单元被设置于所述机械臂的一端,以对着所述机械臂的调整被移动,其中所述作业单元被移动至该目标对象的一作业位置,所述作业单元对该目标对象的作业位置进行消毒和药物注射。
28.根据本发明的一个实施例,所述移动注射设备进一步包括一视觉模块,所述视觉模块被通信地连接于所述移动装置和所述作业装置,其中所述视觉模块视觉识别所述目标对象所在的一目标地点的位置,以使所述移动装置驱动所述作业装置移动至所述目标地点。
29.根据本发明的一个实施例,所述视觉模块识别所述目标对象的位置,以使所述移动装置驱动所述作业装置接近所述目标对象。
30.根据本发明的一个实施例,所述视觉模块包括一图像生成单元和一识别单元,所述图像生成单元被设置于所述作业装置,其中所述图像生成单元生成所述目标地点的图像,所述识别单元被通信地连接于所述图像生成单元,以根据所述目标地点的图像识别所述目标对象的位置。
31.根据本发明的一个实施例,所述识别单元识别所述目标对象的所述标签所在的位置。
32.根据本发明的一个实施例,所述识别单元识别所述目标对象的所述作业位置。
33.根据本发明的一个实施例,所述移动注射设备进一步包括一管理模块,所述管理模块被通信地连接于所述作业装置,其中所述管理模块为所述作业装置建立至少一作业任务。
34.根据本发明的一个实施例,所述管理模块包括一任务单元和一控制单元,所述任务单元建立所述作业任务,所述控制单元被通信地连接于所述任务单元,以获取所述作业任务,其中所述控制单元被连接于所述移动装置,以指示所述移动装置调整所述作业装置的位置,所述控制单元被连接于所述作业装置,以指示所述作业装置装填相应种类和剂量的药物。
35.根据本发明的一个实施例,所述移动装置沿水平面分布,以调整所述作业装置在水平面的位置。
36.根据本发明的一个实施例,所述移动装置包括至少一导轨和至少一驱动件,所述驱动件被安装于所述导轨,其中所述作业装置被所述驱动件可驱动地安装于所述导轨。
37.根据本发明的一个实施例,所述导轨沿水平面分布,以调整所述作业装置在水平面的位置。
38.依据本发明的另一个方面,本发明进一步提供一作业方法,用于一移动注射设备,所述作业方法包括以下步骤:
39.(a)根据需要被注射的至少一目标对象建立至少一作业任务;
40.(b)移动一作业装置接近所述目标对象;和
41.(c)为所述目标对象注射相应剂量的药物。
42.根据本发明的一个实施例,所述步骤(b)进一步包括以下步骤:
43.沿着一移动装置移动以调整所述作业装置在水平面的位置;和
44.移动所述作业装置到达所述目标对象所在的一目标地点。
45.根据本发明的一个实施例,所述步骤(b)进一步包括以下步骤:
46.识别所述目标对象所在的位置;
47.调整所述作业装置的一机械臂的姿态;以及
48.将所述机械臂末端的一执行模块移动至所述目标对象附近。
49.根据本发明的一个实施例,所述步骤(b)进一步包括以下步骤:
50.识别所述目标对象的一标签的位置;
51.移动所述执行模块接近所述标签;以及
52.读取所述标签信息,以确定正确的所述目标对象。
53.根据本发明的一个实施例,所述步骤(b)进一步包括以下步骤:
54.识别所述目标对象的一作业位置;和
55.移动所述执行模块接近所述作业位置。
56.根据本发明的一个实施例,所述步骤(c)进一步包括以下步骤:
57.对所述作业位置消毒;
58.在所述作业位置为所述目标物注射相应剂量的药物;以及
59.再次对所述作业位置消毒。
60.通过对随后的描述和附图的理解,本发明进一步的目的和优势将得以充分体现。
61.本发明的这些和其它目的、特点和优势,通过下述的详细说明,附图和权利要求得以充分体现。
附图说明
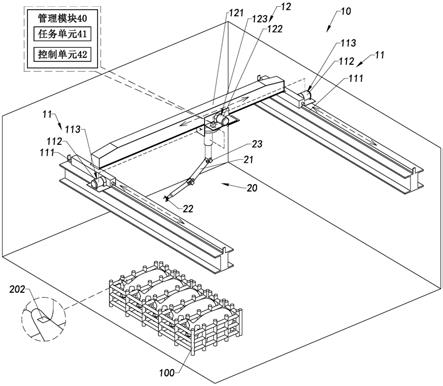
62.图1是根据本发明的一个较佳实施例的一移动注射设备的一示意图。
63.图2是根据本发明的上述较佳实施例的一移动注射设备的一作业装置的示意图。
64.图3a是根据本发明的上述较佳实施例的一移动注射设备的应用场景的示意图。
65.图3b是根据本发明的上述较佳实施例的一移动注射设备的应用场景的另一示意图。
66.图3c是根据本发明的上述较佳实施例的一移动注射设备的应用场景的另一示意图。
67.图4是根据本发明的一个较佳实施例的作业流程的另一示意图。
具体实施方式
68.以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。在以下描述中界定的本发明的基本原理可以应用于其他实施方案、变形方案、改进方案、等同方案以及没有背离本发明的精神和范围的其他技术方案。
69.本领域技术人员应理解的是,在本发明的揭露中,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系是基于附图所示的方位或位置关系,其仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本发明的限制。
70.可以理解的是,术语“一”应理解为“至少一”或“一个或多个”,即在一个实施例中,一个元件的数量可以为一个,而在另外的实施例中,该元件的数量可以为多个,术语“一”不能理解为对数量的限制。
71.参照图1至图4,本发明提供一移动注射设备,所述移动注射设备可以自动对牲畜进行药物注射,代替人工进行注射作业,提高工作效率。
72.参照图1和图2,所述移动注射设备包括一移动装置10和一作业装置20,所述作业装置20被可移动地安装于所述移动装置10,所述作业装置20被所述移动装置10驱动而调整位置。所述作业装置20对牲畜进行注射作业,所述移动装置10驱动所述作业装置20移动,以
根据需要被注射的牲畜调整所述作业装置20的位置,将所述作业装置20对准需要被注射的牲畜进行作业。
73.所述移动装置10被设置于一圈养设施100的上方或上端,所述移动装置10按照该圈养设施100的分布方式进行布置,以适应该圈养设施100的具体情况。所述移动装置10引导所述作业装置20在该圈养设施100的上方或上端移动。
74.在本发明的一个示例中,该圈养设施100可以被实施为适于限制牲畜活动空间的大小,以提高注射成功率。
75.所述移动装置10可以沿着任意方向水平分布,以调整所述作业装置20在水平面的位置。
76.在本发明的另一个示例中,所述作业装置20的一端被设置于该圈养设施100的上方或上端,所述作业装置20的另一端朝向该圈养设施100以及牲畜,以对牲畜进行药物注射。
77.值得一提的是,所述移动装置10的体积较小,具有较小的重量,相应地所述作业装置20的体积小,负重小,对于养殖空间来说,负载小。
78.参照图2,所述作业装置20包括至少一机械臂21和一执行模块22。所述机械臂21的一端被连接于所述移动装置10,所述执行模块22被安装于所述机械臂21的另一端。进一步地,所述机械臂21被所述移动装置10控制沿纵向和横向移动。所述执行模块22随着所述机械臂21的纵向和横向移动而被调整位置。所述执行模块22被设置于所述机械臂21的末端,随着所述机械臂21的移动而移动。
79.所述机械臂21被所述移动装置10调整在水平面的位置,所述机械臂21被调整高度和姿态,以调整垂直方向的位置。所述执行模块22可以从上往下移动,接近所述目标对象200,避免移动过程中被干扰。
80.所述执行模块22执行对所述目标对象200的作业任务。所述执行模块22识别所述目标对象200是否正确。所述执行模块22装填需要为所述目标对象200注射的相应剂量的药物,以为所述目标对象200注射。
81.所述作业装置20还包括至少一调整模块23,所述调整模块23被可驱动地连接于所述机械臂21,所述调整模块23调整所述机械臂21的姿态,以调整被设置于所述机械臂21末端的所述执行模块22的位置和姿态。所述调整模块23驱动所述机械臂21向该圈养设施100移动。进一步地,所述调整模块23驱动所述机械臂21向该圈养设施100中需要被注射的牲畜移动。
82.所述调整模块23驱动所述机械臂21移动和调整所述执行模块22的位置,以使所述执行模块22能够对准所述目标对象200。
83.当所述作业装置20被所述移动装置10驱动,移动至所述目标地点101的上方,所述调整模块23驱动所述机械臂21下降,使得所述执行模块22下降,接近所述目标对象200。所述调整模块23进一步地控制所述执行模块22的朝向,以将所述执行模块22对准所述目标对象200的一作业位置201。
84.所述作业装置20还包括至少一检测模块24,所述检测模块24被设置于所述机械臂21,所述检测模块24对其周围环境进行感知,检测和所述目标对象200之间的相对位置,确定所述目标对象200的方向和位置。所述检测模块24被通信地连接于所述调整模块23,所述
检测模块24将感知所得的数据反馈至所述调整模块23,以使所述调整模块23调整所述机械臂21的位置和方向,进一步地调整所述执行模块22的位置和朝向,以对准所述目标对象200的所述作业位置201。
85.在本发明的一个示例中,所述移动装置10包括至少一导轨和至少一驱动件,所述导轨沿着水平面分布延伸,所述作业装置20被所述驱动件可驱动地安装于所述导轨。所述导轨引导所述作业装置20在水平面的移动,以使所述作业装置20在水平面的位置被调整。
86.在本发明的另一个示例中,所述移动装置10沿着纵向和横向分布。所述移动装置10包括至少一纵向移动设施11和至少一横向移动设施12。所述纵向移动设施11和所述横向移动设施12相互连接,所述纵向移动设施11和所述横向移动设施12之间形成一定的夹角。所述作业装置20可以沿着所述纵向移动设施11纵向移动,以及沿着所述横向移动设施12横向移动。
87.所述纵向移动设施11包括至少一纵向导轨111、至少一纵向驱动件112和至少一纵向移动控制件113。所述作业装置20被可控制移动地沿着所述纵向导轨111移动。所述纵向导轨111引导所述作业装置20纵向移动。所述纵向驱动件112被设置于所述纵向导轨111,所述纵向驱动件112驱动所述作业装置20沿着所述纵向导轨111纵向移动。所述纵向移动控制件113被连接于所述纵向驱动件112,以控制所述纵向驱动件112对所述作业装置20的驱动。
88.所述横向移动设施12包括至少一横向导轨121、至少一横向驱动件122和至少一横向移动控制件123。所述作业装置20被可控制移动地沿着所述横向导轨121移动。所述横向导轨121引导所述作业装置20横向移动。所述横向驱动件122被设置于所述横向导轨121,所述横向导轨122驱动所述作业装置20沿着所述横向导轨121横向移动。所述横向移动控制键123被连接于所述横向驱动件122,以控制所述横向驱动件122对所述作业装置20的驱动。
89.所述纵向移动设施11和所述横向移动设施12的数量根据需要安装所述移动注射设备的养殖厂的该圈养设施100的数量和分布方式确定。由于需要对各个圈养设施100中的养殖的牲畜进行注射,因此各个圈养设施100的上方需要被布置至少一个所述纵向移动设施11或至少一个所述横向移动设施12。
90.在本发明的另一个示例中,各个圈养设施100的上方被布置至少一个所述纵向导轨111或至少一个所述横向导轨121。所述纵向导轨111和所述横向导轨121的数量和分布方式根据该圈养设施100的数量和分布方式确定。单个所述横向导轨121或单个所述纵向导轨111可以跨越多个圈养设施100。
91.所述作业装置20沿着所述纵向导轨111和所述横向导轨121沿着纵向和横向移动,以调整和该圈养设施100中的牲畜的相对位置。
92.值得一提的是,所述移动装置10可以沿着圆周方向分布,也可以沿着放射方向分布。所述移动装置10的分布方式不受限制,实现对所述作业装置20在水平面的位置调整即可。
93.所述移动装置10驱动所述作业装置20移动至需要被注射的牲畜所在的该圈养设施100。需要被注射的牲畜所在的该圈养设施100为所述作业装置20需要作业的一目标地点101。需要被注射的牲畜为一目标对象200。所述目标对象200所在位置为所述目标地点101。所述移动装置10根据所述目标地点101和所述作业装置20的相对位置,驱动调整所述作业装置20的位置,将所述作业装置20移动至所述目标地点101的上方。
94.在养殖场的该圈养设施100及其集合的上方的一定高度设置所述移动装置10。所述移动装置10的高度可以配合该圈养设施100的高度。将所述纵向移动设施11沿着养殖场的x轴方向设置,将所述横向移动设施12沿着养殖场的y轴方向设置,所述纵向移动设施11和所述横向移动设施12的分布间隔和数量和该圈养设施100的分布数量和大小相适应。将所述移动装置20被可驱动地设置于移动装置10,以使所述移动装置20沿着所述纵向移动设施11和所述横向移动设施12移动,实现在xy平面的移动。所述移动装置20能够被移动至xy平面的任意位置。
95.进一步地,设置所述移动装置20可以沿着z轴方向移动。具体地,所述调整模块23驱动盒所述机械臂21沿着z轴向下移动,接近所述目标对象200。所述调整模块23进一步地驱动被设置于所述机械臂21末端的所述执行模块22在xyz坐标轴中的位置,以使所述执行模块22能够达到所述目标对象200的所述作业位置201。
96.在本发明的另一个示例中,所述移动装置10的分布方式和延伸方向可以沿着圆周、放射等任意方向分布,以调整所述作业装置20在水平面的位置。
97.所述移动注射设备还包括一视觉模块30,所述视觉模块30被通信地连接于所述作业装置20。所述视觉模块30获取所述目标对象200的位置信息,以使所述作业装置20能够确定所述目标对象200的位置。
98.所述视觉模块30包括一图像生成单元31,所述图像生成单元31对该圈养设施100的情况进行拍照。该圈养设施100可以为所述作业装置20需要作业的所述目标地点101。所述图像生成单元31生成所述目标地点101的图像。所述视觉模块30进一步包括一识别单元32,所述识别单元32被通信地连接于所述图像生成单元31,所述识别单元32从所述图像生成单元31获取所述目标地点101的图像,从中识别所述目标对象200,以确定所述目标对象200的位置。
99.所述图像生成单元31可以被安装于所述机械臂21的一个或多个位置,也可以被设置于所述移动装置10,如所述移动装置10的导轨,也可以被设置于所述执行模块22的一侧。
100.所述图像生成单元31的数量和安全位置可以根据实际需求确定。
101.所述识别单元32将所述目标对象200的位置反馈至所述移动装置20,以使所述移动装置20根据所述目标对象200的位置进行移动。
102.所述视觉模块30保持对所述目标对象200的监控,以识别所述目标对象200的实时位置,使得所述移动装置20能够根据所述目标对象200的实时位置进行位置调整,实现所述作业装置20对所述目标对象200的跟踪。
103.在本发明的另一个示例中,所述检测模块24和所述视觉模块30共同为所述执行模块22的任务执行服务。所述检测模块24检测所述执行模块22和所述目标对象200之间的相对位置关系,以使所述调整模块23调整所述执行模块22的位置和方向,准确靠近所述目标对象200。所述视觉模块30识别所述目标对象200的位置,以使所述调整模块23调整所述机械臂21的姿态,进而调整所述执行模块22的位置,以使所述执行模块22接近所述目标对象200。
104.所述执行模块22包括一读取单元221,所述读取单元221被设置于机械臂21的末端。所述读取单元221读取一标签202的信息。所述标签202被设置于各个牲畜,所述标签202带有各自的牲畜的信息。通过所述标签202可以识别牲畜。所述目标对象200被设置所述标
签202,以标识所述目标对象200.所述标签202记录所述目标对象200的信息。通过所述标签202识别所述目标对象200。
105.所述读取单元221和所述标签202可以被应用rfid(radio frequency identification,无线射频识别)技术,以使所述读取单元221感应所述标签202被录入的信息,识别所述目标对象200是否正确。
106.所述视觉模块30识别所述目标对象200的所述标签202的位置。具体地,所述图像生成单元31生成所述目标地点101的图像,所述识别单元32从中识别所述目标对象200及其所述标签202的位置。所述视觉模块30将所述目标对象200及其所述标签202的位置反馈至所述移动装置20。
107.所述机械臂21被所述调整模块23驱动,调整位置,使得所述执行模块22接近所述目标对象200的所述标签202。所述读取单元221接近所述标签202,读取所述标签202的信息,以判断配置所述标签202的牲畜是否为所述执行模块22需要作业的所述目标对象200。当所述标签202的信息和所述目标对象200的信息相符,则所述执行模块22需要对所述目标对象200进行注射作业。
108.所述执行模块22还包括一作业单元222,所述作业单元222被设置于所述机械臂21的末端。所述作业单元222需要在所述目标对象200的所述作业位置201作业。
109.所述视觉模块30识别所述目标对象200的所述作业位置201所在的位置,将识别得到的信息反馈至所述移动装置20.所述调整模块23控制和驱动所述执行模块22接近所述作业位置201,将所述作业单元222对准所述作业位置201。
110.所述作业单元222对所述作业位置201进行消毒,以保障后续注射作业的安全。消毒后,所述作业单元222在所述作业位置201为所述目标对象200注射药物。药物的注射量根据所述目标对象200的具体情况确定。
111.所述移动注射设备包括一管理模块40,所述管理模块40被可管理地连接于所述移动装置10、所述作业装置20和所述视觉模块30。
112.所述管理模块40建立至少一作业任务400,确定所述作业装置20需要作业的一目标对象200和为所述目标对象200注射的药物种类和剂量。养殖场的该圈养设施100和养殖的牲畜的信息可以被存储至所述管理模块40,以记录各个圈养设置100和各圈养设施100养殖的牲畜的信息吗,以及各个牲畜的所述标签202的信息。所述管理模块40可以识别各个圈养设施100的位置、养殖的牲畜及牲畜被设置的所述标签202的信息。
113.在所述管理模块40建立所述作业任务时400,可以将需要注射的所述目标对象200的信息填写如所述作业任务400。根据存储的信息,所述管理模块40自动识别所述目标对象200所在的该圈养设施100,即为所述目标地点101。所述作业任务400包括所述目标地点101、所述目标对象200及其所述标签202和需要注射的药物种类及数量等信息。
114.所述管理模块40包括一任务单元41和一控制单元42,所述任务单元41建立所述作业任务400,所述控制单元42被通信地连接于所述任务单元41,以获取所述作业任务400。所述控制单元42可通信地连接于所述移动装置10和所述作业装置20,以输出所述作业任务400。所述控制单元42根据所述作业任务400的药物种类和剂量,指示所述作业装置20装填相应种类和剂量的药物。所述控制单元42根据所述作业任务400的所述目标地点101指示所述移动装置10调整所述作业装置20的位置至所述目标地点101。
115.所述移动装置10从所述作业任务400获取所述目标地点101,所述移动装置10控制所述作业装置20移动至所述目标地点101的上方。
116.其中所述纵向移动设施11调整所述作业装置20在x轴方向的位置,所述横向移动设施12调整所述作业装置20在y轴方向的位置,以使所述作业装置20被移动至所述目标地点101的上方。
117.在本发明的一个示例中,所述移动装置10移动所述作业装置20至所述目标对象200的上方。所述视觉模块30识别所述目标对象200在所述目标地点101的具体位置,将所述目标对象200的具体位置传输至所述移动装置10。所述移动装置10继续调整所述作业装置20在xy平面的位置,以使所述作业装置20被移动至所述目标对象200的上方。所述作业装置20在水平面的位置可以被调整。
118.所述作业装置20调整在z轴方向的位置,以下降,接近所述目标对象200。
119.所述作业装置20从所述控制单元42获取主要注射的所述目标对象200及所述标签202的信息。所述调整模块23调整所述执行模块22的位置,以使所述执行模块22接近所述目标对象200。
120.所述视觉模块30识别所述目标对象200的所述标签202在所述目标对象200的具体位置,并反馈至所述作业装置20。所述调整模块23调整所述执行模块22接近所述目标对象200的所述标签202,所述执行模块22的所述读取单元221读取所述标签202的信息,判断所述标签202的信息是否和所述作业任务400相符,若相符,则所述目标对象200正确。
121.所述视觉模块30识别所述目标对象200可供注射的所述作业位置201。所述调整模块23继续调整所述执行模块22的位置,以使所述执行模块22接近所述目标对象200的所述作业位置201。所述执行模块22的所述作业单元221对准所述作业位置201,对所述作业位置201消毒。消毒完成后,所述作业单元221按照所述作业任务400指示的需要注射的剂量,在所述作业位置201向所述目标对象200注射相应的药物和剂量。注射后,所述作业单元221对所述祖业位置201再次消毒,以保障作业安全、卫生和所述目标对象200的安全。
122.作业完成后,所述管理模块40对被注射的所述目标对象200进行标记,存储数据,以防止重复注射。进一步地,所述执行模块20将识别的所述标签202的信息和注射的药物及剂量反馈至所述管理模块40,以检查注射情况。也可以人工对所述目标对象200进行检查,以观察注射情况。也就是通过所述视觉模块30对注射后的所述目标对象200进行观察,以判断所述目标对象200是否出现异样,实时监控,以保证及时救治,保障所述目标对象200的健康和安全。
123.在作业的过程中,所述视觉模块30保持对所述目标地点101的监控和识别,以根据实际情况,实时调整所述作业装置20,适应实时情况。所述视觉模块30还可以对其他的该圈养设施100进行监控。
124.用户可以通过所述管理模块40建立所述作业任务400和向所述移动装置10和所述作业装置20发出控制指令,以远程操控所述移动装置10和所述作业装置20,避免人员进入该圈养设施100,可以防止人员携带病菌对牲畜造成不利影响。
125.用户通过所述管理模块40实时操控所述移动装置10和所述作业装置20,以根据实际情况进行适时调整作业。
126.所述视觉模块30对该圈养设施100及养殖的牲畜进行实时监控,以识别各个牲畜
的状态,以识别一作业时机。当所述作业时机生成,所述作业装置20被所述移动装置10控制箱所述目标对象200移动,对所述目标对象200进行注射。所述视觉模块30可以识别所述目标对象200适宜被注射药物的时机,比如牲畜放松的时刻,作为所述作业时机,并自动控制所述移动装置10调整所述作业装置20的位置,和控制所述作业装置20为所述目标对象200进行药物注射。
127.所述管理模块40通过所述视觉模块30监控牲畜的状态,以根据牲畜的健康状态自动生成所述作业任务400,将健康状况不佳的牲畜作为所述目标对象200,建立所述作业任务400,确定注射的药物种类和剂量。所述任务单元41建立所述作业任务400,确认需要注射的所述目标对象200和其所在的所述目标地点101,所述视觉模块30获取所述作业任务400,使得所述目标对象200的位置。所述移动装置10控制所述作业装置20移动至目标地点101,接近所述目标对象200,所述作业装置20为所述目标对象20注射药物,以及时控制所述目标对象20,防止疫病产生或者其他不利健康的状况产生。
128.参照图3a至图3c示出的本发明的一应用场景,所述移动注射设备可以被应用于为猪注射疫苗等药物。所述移动注射设备被安装于养殖场,对养殖场养殖的猪进行药物注射。该圈养设施100可以为实施为养殖猪的猪栏。猪栏上方具有一定的空间。将所述移动装置10在猪栏上方一定的高度安装,所述作业装置20被可移动地安装于所述移动装置10。其中所述移动装置10的所述纵向移动设施11沿纵向安装,所述移动装置10的所述横向移动设施12沿横向安装,所述作业装置20沿着所述纵向移动设施11和所述横向移动设施纵向和横向地移动,进而调整所述作业装置20在猪栏上方空间的位置。
129.至少一个所述纵向导轨111和至少一个所述横向导轨121被设置于各个猪栏的上方,或者至少一个所述纵向导轨111和至少一个所述横向导轨121延伸至各个猪栏的上方,以使所述作业装置20可以被移动至各个猪栏的上方。
130.根据养殖场配置的猪栏及其分布情况和各个猪栏养殖的猪的信息,配置所述管理模块40,以适应养殖场的具体养殖情况。所述管理模块40为需要注射猪建立所述作业任务400,在所述作业任务400中添加需要注射猪为所述目标对象200。所述任务单元41建立所述目标对象200的作业任务。值得一提的是,所述目标对象200可以为多个。所述任务单元41为多个所述目标对象200建立作业执行的路径规划。
131.所述任务单元41根据所述目标对象200建立任务时,可以自动匹配所述目标对象200的所述标签202的信息以及所述目标对象200所在的所述目标地点101的信息,以添加至所述作业任务400。
132.在本发明的另一个示例中,所述任务单元41根据需要执行作业任务的所述目标地点101建立所述作业任务400,并将所述目标地点101养殖的猪自动匹配进所述作业任务400,作为所述目标对象200,以建成所述作业任务400。
133.所述作业任务400中包括所述目标对象200及其所述标签202的信息,和所述目标地点101的位置信息。
134.所述任务单元41为所述作业任务400建立所述目标对象200需要被注射的药物种类和剂量。
135.所述作业装置20从所述管理模块40获取所述作业任务400,所述执行模块22根据需要注射的药物种类和剂量,装填相应药物和剂量。
136.所述控制单元42获取所述作业任务400,以控制所述移动装置10对所述作业装置20的位置调整。所述移动装置10的所述纵向移动设施11和所述横向移动设施12调整所述作业装置20在xy平面的位置,将所述作业装置20移动至所述目标地点101的上方。
137.所述视觉模块30从所述管理模块40获取所述作业任务400的所述目标对象200及其所在的所述目标地点101。所述视觉模块30的所述图像生成单元31生成所述目标地点101的图像。所述识别模块32从所述目标地点101的图像中识别所述目标对象200的位置。所述作业装置20从所述视觉模块30获取所述目标对象200的位置。
138.所述调整模块23调整所述机械臂21的姿态和高度,以调整所述执行模块22接近所述目标对象200。
139.所述识别模块42识别所述目标对象200的所述标签202所在的位置,以使所述调整模块23调整所述机械臂21的姿态,将所述执行模块22移动至所述标签202的位置,所述读取单元221驱动所述标签202的信息,判断所述标签202的信息是否和所述作业任务400的信息相符。若相符,则所述调整模块23根据所述识别模块42识别的所述目标对象200的所述作业位置201,调整所述机械臂21的姿态,将所述执行模块22接近所述作业位置201,以使所述作业单元222在所述作业位置201作业。
140.所述作业单元222对所述作业位置201进行消毒。消毒后,所述作业单元222根据所述作业任务400确定的剂量,在所述作业位置201向所述目标物200注射相应剂量的药物。注射完成后,所述作业单元222对所述作业位置201再次消毒,使得注射过程,安全卫生。
141.对所述目标对象200的作业完成后,所述执行模块22反馈至所述管理模块40,所述管理模块40核对无误后,对所述作业任务400进行标记,作为执行记录。
142.参照图4,本发明进一步提供一作业方法,所述作业方法包括以下步骤:
143.s1:建立所述作业任务400。
144.所述管理模块40建立所述作业任务40,以确定所述目标对象200及其所在的所述目标地点101。所述作业任务400包括需要注射的所述目标对象200及所述标签202,和注射药物种类和剂量。
145.s2:移动所述作业装置20接近所述目标对象200。
146.所述移动装置10从所述管理模块40获取所述作业任务400,以按照所述目标地点101的信息,控制所述作业装置20在xy平面移动,直至所述作业装置20移动至所述目标对象200的上方。
147.所述步骤s2进一步包括以下步骤:
148.s21:通过所述视觉模块30识别所述目标对象200的位置。
149.所述视觉模块30视觉图像识别技术识别所述目标对象200的位置。其中所述图像生成单元31生成所述目标地点101的图像,所述识别单元32识别图像中所述目标对象200的位置。
150.s22:移动所述作业装置20至所述目标对象200的上方。
151.所述移动装置10从所述视觉模块30获取所识别的所述目标对象200的位置,以调整所述作业装置20在xy平面的位置。
152.其中,所述纵向移动设施11引导所述作业装置20沿着x轴移动,调整x轴方的位置,所述横向移动设施12引导所述作业装置20沿着y轴移动,调整y轴方向的位置,使得所述作
业装置20在xy平面的位置被调整。
153.s23:识别所述目标对象200的所述标签202的位置。
154.所述视觉模块30进一步识别所述标签202的位置,以确定所述作业装置20能够读取所述标签202的位置。
155.s24:移动所述执行模块22以读取所述标签202。
156.所述调整模块23根据所述标签202被识别的位置,调整所述机械臂21的位置和方向,进而调整位于所述机械臂21末端的所述执行模块22的位置和朝向,使得所述执行模块22的所述读取单元221接近所述标签202。
157.所述读取单元202读取所述标签202,以判断被设置所述标签202的牲畜是否为所述作业任务400中的所述目标对象200,若两者相符,则所述执行模块22可以继续执行所述作业任务400。
158.s25:移动所述执行模块22至所述目标对象200的所述作业位置201。
159.所述视觉模块30进一步识别所述目标对象200的所述作业位置201,以确定所述执行模块22进行注射作业的位置。所述调整模块23根据所述作业位置201调整所述机械臂21的姿态,以使所述执行模块22接近所述作业位置201。
160.s3:在所述目标对象200的所述作业位置201注射。
161.所述调整模块23将所述执行模块22的所述作业单元222对准所述作业位置201。所述作业单元222对所述作业位置201。
162.s31:对所述作业位置201消毒。
163.所述作业单元222对所述作业位置201进行消毒,以保证注射的安全和卫生。
164.s32:按照所述作业任务400确定的剂量向所述目标对象200注射药物。
165.所述作业单元22按照所述作业任务400确定的药物注射量,在所述作业位置201所述目标对象200注射药物。
166.s33:再次对所述作业位置201消毒。
167.注射完成后,所述作业单元22再次对所述作业位置201进行消毒,以保障安全和卫生。
168.s4:检查所述目标对象200的注射情况。
169.通过所述管理模块40检查所述作业任务400的执行情况。所述执行模块22执行完成后,所述管理模块40对所述作业任务400进行核对,并做出标识,结束所述作业任务400。通过所述视觉模块30监控和识别所述目标对象200的状态,以及时记录所述目标对象200的变化。
170.通过人工观察所述目标对象200被注射药物后的情况。
171.所述管理模块40可以建立多个所述作业任务400,所述任务单元41建立多个所述作业任务400,各个所述作业任务400分别含有各自的执行任务的所述目标地点101。
172.所述控制单元42根据各个所述作业任务400的所述目标地点101规划所述作业装置20的一移动路径,以使所述作业装置20能够按照最优路径移动作业。举例地,所述控制单元42将各个作业任务400按照所述目标地点101在xy平面的位置进行分类,将同一轴向的所述目标地点101按照顺序排列,以使所述作业装置20可以先沿着x轴或y轴移动至各个所述目标地点101依次作业,再按y轴或x轴移动依次作业。
173.所述控制单元42将各个所述目标地点101排序,规划所述作业装置20在各个所述目标地点101的所述移动路径,避免所述作业装置20重复路径,保障所述作业装置20移动高效,提高作业效率,减少不必要的位置调整。
174.所述移动注射设备可以根据养殖场的具体情况进行配置。所述移动注射设备可以被安装于上方的空余空间,不对牲畜养殖区造成影响。
175.本领域的技术人员应理解,上述描述及附图中所示的本发明的实施例只作为举例而并不限制本发明。本发明的目的已经完整并有效地实现。本发明的功能及结构原理已在实施例中展示和说明,在没有背离所述原理下,本发明的实施方式可以有任何变形或修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1