取出装置的制作方法
1.本发明涉及介入医疗器械技术领域,尤其涉及一种用于取出长期地植入在患者体内的电极导线的取出装置。
背景技术:
2.多种医疗处理和外科手术方法需要在人类或牲畜患者的身体内植入细长结构。这种细长结构可以包括导液管、鞘管、心脏电极导线(例如起搏器导线或除颤器导线),以及多种其它装置。其中,心脏起搏器通常植入患者胸壁内的皮下组织袋口内,心脏起搏器的多根导线从起搏器经由静脉延伸到患者心脏的腔室内;除颤器导线可以固定在心脏的内部或者外部。
3.在某些情况下,需要将植入患者身体内的导线去除,比如植入患者体内的导线断开而无法传输信号、电极尖端形成大量纤维(或钙化)组织而导致起搏器无法提供足够的能量来运行、导线部位感染、凝块或瘢痕组织阻塞静脉,或产生其他故障。然而,由于细长结构植入患者体内时间较长,导线上会附着有很多纤维(或钙化)组织,使多根导线之间,导线与血管壁之间,或导线与心脏内壁之间附着在一起,导线无法直接取出,强行取出会出现导线断裂、损坏周边完好的导线、损坏血管壁或心脏内壁等问题。
技术实现要素:
4.本发明提供了一种取出装置,用于取出植入在体内的细长结构,所述取出装置包括操控手柄、连接于所述操控手柄远端的鞘管,及连接于所述鞘管远端的扩张头,所述操控手柄包括驱动件及连接于所述驱动件的转动件,所述驱动件向近端运动的过程中,所述驱动件用于驱动所述转动件沿一个方向旋转,所述转动件带动所述鞘管及所述扩张头做同步运动。
5.本发明的取出装置的操控手柄能带动扩张头及鞘管在患者的血管内移动,且操控手柄能控制驱动件来驱动转动件旋转,所述转动件的旋转能带动鞘管及扩张头同步旋转。所述细长结构(如导线)的近端穿过穿线内腔并从操控手柄穿出取出装置而延伸至体外的过程中,扩张头及鞘管在血管中向远端推进,以切割包裹在细长结构周围的纤维组织,使细长结构与血管的内壁分离。由于操控手柄通过驱动所述转动件能带动鞘管及扩张头同步旋转,能使扩张头有效地切割包裹在细长结构周围的纤维组织,方便安全和顺利地取出患者体内的细长结构。
附图说明
6.为了更清楚地说明本发明实施例的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
7.图1是本发明其中一实施例提供的取出装置的结构示意图。
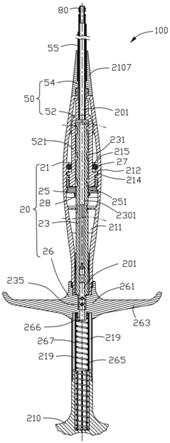
8.图2是图1中的取出装置沿ii-ii线的剖视结构示意图。
9.图3是图2中的取出装置的部分剖视放大图。
10.图4是图2中的蜗杆、蜗轮组件与内鞘管接头的立体构结分解示意图。
11.图5是图4中的蜗杆的放大示意图。
12.图6是图4中的内鞘管接头的放大示意图。
13.图7是图4中的蜗轮组件与内鞘管接头的放大示意图。
14.图8是图4中的蜗轮组件、蜗杆及内鞘管接头的组装后的剖视图。
15.图9是图1中的取出装置沿viii-viii线的剖视结构示意图。
16.图10是图9中的部分剖视放大图。
17.图11是图10中的取出装置的其一状态的示意图。
18.图12是图9中的取出装置的使用状态的剖视结构示意图。
具体实施方式
19.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
20.此外,以下各实施例的说明是参考附加的图示,用以例示本发明可用以实施的特定实施例。本发明中所提到的方向用语,例如,“上”、“下”、“前”、“后”、“左”、“右”、“内”、“外”、“侧面”等,仅是参考附加图示的方向,因此,使用的方向用语是为了更好、更清楚地说明及理解本发明,而不是指示或暗指所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。“部件a与部件b的连接”是指部件a直接与部件b接触连接,或者部件a通过其他部件与部件b进行间接连接。
21.为了更加清楚地描述取出装置的结构,本发明所述的限定术语“近端”、“远端”及“轴向”为介入医疗领域惯用术语。具体而言,“远端”表示手术操作过程中远离操作人员的一端;“近端”表示手术操作过程中靠近操作人员的一端;“轴向”指装置中轴线所在方向,径向为与中轴线垂直的方向。除非另有定义,本发明所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本发明在说明书中所使用的惯用术语只是为了描述具体实施例的目的,并不能理解为对本发明的限制。
22.请参阅图1及图2,本发明提供一种取出装置100,用于剥离植入体内的细长结构(如图11所示)周围附着的身体组织,并取出在体内的所述细长结构。细长结构可以为心脏导线、神经起搏和刺激导线、导液管、护套、套管和其他管状类似物。为了方便起见,下面以细长结构为起搏器的导线500为例进行说明,导线500的远端还连接有固定在心脏上的电极。应该理解的是,取出装置100可以用于取出于至少以上所述的其它细长结构。
23.取出装置100包括操控手柄20、连接于所述操控手柄20远端的鞘管50,及连接于鞘管50远端的扩张头80;其中,操控手柄20、鞘管50及扩张头80沿取出装置100的轴向设有用于传输导线500的穿线内腔201,导线500用于依次穿过扩张头80、鞘管50以及操控手柄20中的穿线内腔201从取出装置100的近端伸出。操控手柄20用于控制鞘管50及扩张头80旋转。具体地,操控手柄20包括驱动件及连接于驱动件的转动件,鞘管50远离扩张头80的一端连
接于转动件,所述驱动件向近端运动的过程中,所述驱动件用于驱动所述转动件沿一个方向旋转,使得所述转动件带动鞘管50及扩张头80做同步运动。扩张头80的远端具有用于切割包裹在导线500周围的纤维组织的刀刃,以便在导线500的取出过程中切穿或者以其它方式断裂所遇到的障碍物。所述一个方向旋转,是指在所述驱动件向近端运动的过程中,所述驱动件不会驱动所述转动件改变旋转方向。
24.使用取出装置100时,医生将患者体内的导线500的近端(靠近医生的一端)插入扩张头80中。医生抓握操控手柄20并向远端(远离医生的一端)推动操控手柄20,使得鞘管50与扩张头80沿着所述电极导线逐渐进入患者的血管内。当向远端推动操控手柄20的阻力较大时,则说明扩张头80抵触到结合在导线500周围的组织,通过操控手柄20控制所述驱动件驱动所述转动件旋转,转动件的旋转能带动鞘管50及扩张头80同步旋转,从而使扩张头80的锋利的刀刃对结合在所述电极导线周围的组织进行切割,实现导线与组织分离,以便利后续的电极导线的取出操作。
25.本发明取出装置100的操控手柄20能带动扩张头80及鞘管50在患者的血管内移动,且操控手柄20能控制驱动件来驱动转动件旋转,所述转动件的旋转能带动鞘管50及扩张头80同步旋转。导线500的近端经过穿线内腔201从操控手柄20穿出取出装置100而延伸至体外的过程中,扩张头80及鞘管50在血管中向远端推进,以切割包裹在导线500周围的纤维组织,使导线500与血管的内壁分离。由于操控手柄20通过驱动所述转动件能带动鞘管50及扩张头80同步旋转,能使扩张头80有效地切割包裹在导线500周围的纤维组织,方便安全和顺利地取出患者体内的导线500。
26.如图2所示,操控手柄20还包括外壳21。如图2所示,外壳21概呈近端密封的管状结构,外壳21的近端设置鱼尾形的端块210,所述鱼尾形的端块210能增大与外科医生的手指接触的面积,方便操作。外壳21内沿轴向开设收纳槽211,收纳槽211的远端穿通外壳21的远端面,收纳槽211的近端延伸至端块210内,且没有穿通所述端块210的近端面。驱动件及转动件收容于收纳槽211内,鞘管50的近端自外壳21的远端插入收纳槽211后连接于转动件。
27.操控手柄20还包括沿轴向滑动地设置于外壳21中的操作件26,操作件26连接于驱动件的近端。鞘管50的近端连接于转动件,操作件26控制驱动件来驱动转动件旋转,以带动鞘管50及扩张头80同步旋转。
28.如图2所示,所述驱动件沿轴向开设连通鞘管50的内腔的穿线通槽2301,导线500的近端依次穿过扩张头80、鞘管50中的穿线内腔201及驱动件的穿线通槽2301后从外壳21穿出,以便操作者,比如外科医生从操控手柄20上的取出剥离纤维组织后的导线。
29.本实施例中,所述驱动件包括蜗杆23,蜗杆23沿轴向滑动地设置于外壳21的收纳槽211内;转动件包括蜗轮25,所述蜗轮25套设于所述蜗杆23外围,鞘管50的近端自外壳21的远端开口插入收纳槽211后连接于蜗轮25,蜗杆23沿轴向滑动用于带动蜗轮25及鞘管50旋转。鞘管50包括连接于蜗轮25的内鞘管接头52及连接于内鞘管接头52远端的内鞘管54,内鞘管接头52背离内鞘管54的一端连接于蜗轮25。使用取出装置100时,导线500的近端沿轴向穿过扩张头80、内鞘管54的内腔、内鞘管接头52的穿线内腔201、驱动件的穿线通槽2301及外壳21的内腔后从外壳21穿出。
30.如图2及图3所示,外壳21的内壁设置有第一限位部212,第一限位部212用于与内鞘管接头52配合,以限定内鞘管接头52在轴向上的运动范围,使得内鞘管接头52在轴向上
无法前后移动。在第一限位部212的作用下,内鞘管接头52能够围绕取出装置100的轴心线转动。
31.具体地,第一限位部212包括设置于外壳21的内壁的间隔的一对第一限位筋213,一对第一限位筋213之间围成旋转槽214,内鞘管接头52的外周面对应旋转槽214凸设第一环形板522,第一环形板522用于容置于旋转槽214内,第一环形板522与第一限位筋213在轴向上对内鞘管接头52进行限位。
32.外壳21的内壁还设置有第二限位部,所述第二限位部用于与蜗轮25配合以在轴向上对蜗轮25进行限位。本实施方式中,所述第二限位部具体为凸设于外壳21内壁上沿周向延伸的第二环形板217。蜗轮25的外周面对应第二环形板217沿周向开设环形槽252,第二环形板217可转动地容置于环形槽252内,第二环形板217在轴向及径向上对蜗轮25进行限位,使得蜗轮25仅能以蜗轮25的轴心线旋转。
33.在其他实施例中,外壳21的内壁沿周向开设环形槽,蜗轮25的外周面对应所述环形槽凸设环形板,所述环形板可转动地容置于所述环形槽内,所述环形板在轴向及径向上对所述蜗轮25进行限位,使得蜗轮25仅能以蜗轮25的轴心线旋转。可以理解的是,在不违背本发明原理的情况下,第一限位部212与所述第二限位部的具体技术方案可以通用,在变更实施例中,第一限位部212与所述第二限位部还可以采用其他的技术方案分别对内鞘管接头52以及蜗轮25进行限位。
34.外壳21的收纳槽211的内壁设置有用于对驱动件进行限位的第三限位部218。具体地,第三限位部218是设置于外壳21内壁的环形板,并位于第二环形板217的近端。第三限位部218用于在取出装置100的径向上对驱动件进行限位。进一步地,第三限位部218沿轴向开设圆形的通孔,蜗杆23沿轴向滑动地插设于第三限位部218的通孔内,所述通孔的轴心线与蜗杆23的轴心线重合,第三限位部218的通孔的内径略大于蜗杆23的外径,以对蜗杆23在取出装置100的径向上进行限位,使得蜗杆23能围绕取出装置100的轴向旋转。
35.如图2所示,外壳21的近端靠近端块210处沿轴向开设连通收纳槽211的导槽219,操作件26一部分容置于外壳21中,另一部分穿过导槽219延伸至外壳21之外,导槽219的沿轴向的长度足够长,使得操作件26沿导槽219能够滑动。蜗杆23的近端固定连接于操作件26,操作件26沿导槽219滑动能带动蜗杆23沿轴向滑动。本实施例中,外壳21上开设相对的两个导槽219,操作件26包括连接于蜗杆23近端的连接部261及设置于连接部261相对两侧的手柄263,连接部261能沿轴向滑动地容置于收纳槽211中,两个手柄263穿过导槽219延伸至外壳21外。向近端拉动两个手柄263,带动连接部261沿导槽219滑动,连接部261的滑动带动蜗杆23滑动。
36.如图8所示,外壳21的侧壁上开设连通所述穿线通槽2301的出线孔2101,导线500的近端从穿线通槽2301的开口穿出后,经出线孔2101延伸出取出装置100,即导线500的近端穿过扩张头80的穿线内腔201、鞘管50的穿线内腔201及驱动件的穿线通槽2301后,从外壳21的出线孔2101伸出外壳21。出线孔2101靠近操作件26的近端处。
37.蜗杆23靠近操作件26的一端沿轴向开设连通穿线通槽2301的开口2303,导线500的近端经开口2303延伸至出线孔2101。开口2303设置于蜗杆23的外表面,外壳21在出线孔2101的近端向开口2303内倾斜延伸的引导部2105,开口2303中的导线500的近端沿引导部2105滑动后穿过出线孔2101。引导部2105的末端开口2303的内表面,蜗杆23沿轴向朝近端
滑动时,引导部2105相对于开口2303的内表面滑动。在一种实施例中,引导部2105与开口2303的内表面无间隙,不会阻挡导线500的近端,便于导线500的近端沿引导部2105穿过出线孔2101。
38.请一并参阅图4至图6,所述蜗杆23包括圆柱状的杆体230,单向螺旋槽231设置于杆体230的外周面上,单向螺旋槽231沿一个方向旋转延伸,在本发明中,如图4所示,从近端向远端看,单向螺旋槽231沿围绕轴向的顺时针旋转延伸,可以理解的是,单向螺旋槽231也可以沿围绕轴向的逆时针旋转延伸。
39.蜗轮25沿轴向开设用于穿设杆体230的通孔251,即蜗轮25呈环形,其围成的通孔251用于穿设杆体230。蜗轮25的内周面(朝向通孔251的表面)上凸设有用于容置于单向螺旋槽231中的导滑销254。在蜗杆23沿轴向在通孔251中活动的过程中,导滑销254在单向螺旋槽231内滑动,以带动蜗轮25旋转。
40.如图5所示,单向螺旋槽231是指在杆体230的外表面设置有沿一个方向旋转延伸的螺旋槽,单向螺旋槽231的远端延伸至杆体230的远端面,即单向螺旋槽231在杆体230的远端面形成有一开口。
41.在其他实施例中,导滑销254还可以设置在蜗轮25上的其他位置,比如朝向内鞘管接头52的表面。导滑通孔256也可以为圆形通孔、椭圆形通孔、梯形通孔、平行四边形通孔、多边形通孔或不规则形通孔。导滑销254的末端可以为圆滑过渡。
42.如图6所示,本实施方式中,为了蜗轮25受力平衡,导滑销254的数量为2个,两个导滑销254相对的设置于蜗轮25的通孔251的内壁,即两个导滑销254位于蜗轮25的同一轴向位置上。两个导滑销254可滑动地插设于蜗杆23的单向螺旋槽231内。
43.进一步地,杆体230近端设置有连接柱235,连接柱235用于固定连接操作件26,使得杆体230能够跟随操作件26沿轴向在壳体21的内腔中滑动。具体的,连接柱235与操作件26之间可以通过卡接或螺钉固定等方式固定连接;连接柱235与操作件26之间也可以利本领域公知的其他常规连接方式进行连接。穿线通槽2301沿蜗杆23的轴向穿通杆体230,开口2303位于单向螺旋槽231与连接柱235之间。
44.在其他实施例中,单向螺旋槽231也可以设于蜗轮25的内周面上,即单向螺旋槽231设置于蜗轮25朝向的通孔251的内周面上,导滑销254凸设于蜗杆23的外周面;在蜗杆23沿轴向在通孔251中滑动的过程中,导滑销254在单向螺旋槽231内滑动,以带动蜗轮25旋转。
45.如图6所示,蜗轮25为圆环结构,圆形的通孔251沿轴向开设于蜗轮25的中部,环形槽252沿周向开设于蜗轮25的外周面上。蜗轮25的远端面于通孔251的周围开设收容孔255(如图3所示),鞘管50的近端可旋转地容置于收容孔255内。
46.具体地,内鞘管接头52的近端可旋转地容置于收容孔255内。内鞘管接头52的近端旋转地容置于收容孔255内。具体地,内鞘管接头52的近端与蜗轮25之间可以通过卡接、或粘接等方式固定连接。
47.蜗轮25的近端面沿轴向开设导滑通孔256,导滑通孔256的近端穿过蜗轮25的近端面,导滑通孔256的远端连通收容孔255。本实施例中,蜗轮25的近端面上设有相对的两个方形的导滑通孔256,即两个导滑通孔256以蜗轮25的轴心线对称。蜗轮25的近端面于每一导滑通孔256相对的两侧分别开设定位孔2561及凸设定位柱2563。
48.如图2、图4及图6所示,操控手柄20还包括单向限位组件28,单向限位组件28设置于蜗轮25上,并跟随蜗轮25同步绕轴向旋转。单向限位组件28包括限位杆281、第一弹性件283、锁固件286以及具有内腔的定位盖285。
49.限位杆281包括沿轴向插设于导滑通孔256中的抵触部2811、设置于抵触部2811近端的止挡部2812,以及沿轴向凸设于止挡部2812近端的延伸部2814。当抵触部2811插入导滑通孔256,且止挡部2812贴合于蜗轮25的近端面时,抵触部2811的远端延伸至收容孔255(图3)中。第一弹性件283用于推动限位杆281向远端移动,从而使限位杆281抵接于鞘管50的近端,即第一弹性件283推动止挡部2812以带动抵触部2811沿导滑通孔256向远端滑动并抵接鞘管50的近端,直至止挡部2812贴合于蜗轮25的近端面。
50.本实施例中,第一弹性件283为套装于限位杆281的延伸部2814上的弹簧。定位盖285扣合于蜗轮25的表面,本实施例中扣合于蜗轮25近端表面。定位盖285近端沿轴向开设连通其内腔的滑孔2852,限位杆281的延伸部2814及止挡部2812能容置于定位盖285的内腔,且延伸部2814能插入滑孔2852中。第一弹性件283套设于延伸部2814外围,第一弹性件283的相对的两端分别抵接于止挡部2812及定位盖285的内壁。定位盖285的远端沿径向朝外凸设连接板2854,连接板2854沿轴向开设两个定位孔;本实施例中,定位盖285的远端设置有两个所述连接板2854。
51.本实施列中,为使蜗轮25的近端面受力平衡,及使限位杆281对内鞘管接头52的限位更稳定,操控手柄20包括两个单向限位组件28,两个单向限位组件28的限位杆281分别对应蜗轮25的两个导滑通孔256。
52.鞘管50的近端设有啮合部523。具体地,内鞘管接头52的近端设置有啮合部523。啮合部523包括齿条5230。单向限位组件28的限位杆281沿轴向抵接啮合部523,蜗杆23在向近端滑动的过程中,限位杆281的远端卡接于齿条,使得鞘管50跟随蜗轮25做同步运动;蜗杆23在向远端滑动的过程中,限位件的281远端在啮合部523的表面滑动,蜗轮25相对于鞘管50旋转,即鞘管50不随蜗轮25旋转。
53.具体地,内鞘管接头52包括近端插设于蜗轮25的收容孔255内的管体521,第一环形板522沿管体521的周向凸设于邻近管体521的近端,管体521于第一环形板522的近端容置于蜗轮25的收容孔255内;啮合部523设置于管体521的近端面。第一弹性件283用于在轴向上弹性抵顶限位杆281,使限位杆281的抵触部2811卡接于啮合部523。本实施例中,啮合部523与单向限位组件28相互配合,从而限定鞘管50在蜗轮25沿第一方向旋转(蜗杆23向近端运动)的过程中与蜗轮25同步,在蜗轮25沿第二方向旋转(蜗杆23向远端运动)的过程中不跟随蜗轮25旋转,第一方向与第二方向相反。
54.本实施例中,齿条5230包括朝向限位杆281设置的多个第一表面5231以及至少一第二表面5233,每个第二表面5233连接在两个第一表面5231之间,第一表面5231与指向近端的轴线之间的夹角为第一夹角,第二表面5233与指向近端的轴线之间的夹角为第二夹角,第一夹角大于第二夹角。即第一表面5231相对比较平缓,第二表面5233相对比较陡峭,第一表面5231与第二表面5233的连接处(第二表面5233的近端边界处)形成一锯齿5234,第二表面5233的远端边界处形成一凹陷5236。
55.蜗杆23在向近端滑动的过程中,限位杆281的远端从第二表面5233的远端向第二表面5233的近端运动,从而卡合于凹陷5236中,与第二表面5233相抵,即限位杆281卡接于
齿条,限位杆281随着蜗轮25围绕轴向转动,并带动啮合部523以及鞘管50做同步运动。
56.蜗杆23在向远端滑动的过程中,限位杆281的远端面滑过一个第一表面5231后,依次越过一第二表面5233的近端与远端后,再滑动至相邻的第一表面5231上,使得限位杆281的远端持续在啮合部523的近端面上滑动,不会与第二表面5233抵接,限位杆281与蜗轮25相对于鞘管50旋转,即限位杆281在内鞘管接头52的近端面上打滑。
57.由于第一表面5231相对于轴向具有斜率,因此第一表面5231在周向的不同位置上与取出装置100近端的距离是不同的,并且限位杆281从一个第一表面5231跨越至相邻第一表面5231的过程中,限位杆281的远端与取出装置100的近端的距离也是可能有变化的。
58.蜗杆23在向远端滑动的过程中,抵触部2811滑过多个第一表面5231,多个第一表面5231与轴向间的夹角可以相同,也可以不同。每个第一表面5231时序推动抵触部2811压缩第一弹性件283,抵触部2811滑动至第一表面5231的远端时,止挡部2812压缩第一弹性件283的程度较小,抵触部2811滑动至第一表面5231的近端时,止挡部2812压缩第一弹性件283的程度较大。
59.在变更实施例中,啮合部523的近端面还包括除第一表面5231与第二表面5233之外的其他表面,比如一垂直于轴线的一平面。
60.如图3所示,蜗杆23在向远端滑动的过程中,为保证鞘管50相对于操控手柄20的外壳21静止不动,操控手柄20还设置有阻尼件27。阻尼件27设置于鞘管50的近端与外壳21之间,进一步地,阻尼件27靠近轴线的一侧表面接触内鞘管接头52,从而产生用于阻止内鞘管接头52旋转的阻尼。
61.具体地,本实施例中,阻尼件27呈环状,可以理解的是,阻尼件27还可以呈条形、球形或其他形状。
62.外壳21的内壁于邻近一对第一限位筋213处凸设有第二限位筋215,第二限位筋215与相邻的第一限位筋213之间围成环形的定位槽216,定位槽216用于定位阻尼件27。具体地,第二限位筋215邻近位于远端的第一限位筋213,定位槽216的轴向宽度略小于定位阻尼件27的直径,以便于阻尼件27定位于所述定位槽216内。
63.如图2所示,本实施例中,内鞘管接头52与内鞘管54之间通过螺接固定,具体地,内鞘管接头52的远端设置有内螺纹,内鞘管54的近端设置有外螺纹,所述内螺纹与所述外螺纹装配到位后用螺纹胶固定,从而使内鞘管接头52与内鞘管54固定在一起。内鞘管接头52与内鞘管54也可以用其它方式固定,如焊接等方法等。
64.请一并参阅图4-图7,组装蜗杆23、蜗轮25、内鞘管接头52及单向限位组件28时,先组装每一单向限位组件28至内鞘管接头52上,具体地,将每一单向限位组件28的第一弹性件283套装于限位杆281的延伸部2814上,将第一弹性件283、延伸部2814及止挡部2812容置于定位盖285的内腔,使延伸部2814插入滑孔2852中,将限位杆281的限位部2811插入导滑通孔256中,使得每一导滑通孔256两侧的定位柱2563插入定位盖285对应的两个定位孔中,两个锁固件286分别穿过定位盖285另外的两个定位孔锁固于内鞘管接头52对应的两个定位孔2561中,以将两个单向限位组件28安装于蜗轮25;将蜗轮25可转动地套接于杆体230外,具体地,将蜗轮25的导滑销254自杆体230的远端可滑动地插入单向螺旋槽231内;将内鞘管接头52的近端插入蜗轮25的收容孔255;此时,第一弹性件283弹性抵推限位杆281使限位部2811与啮合部523相互卡接;杆体230的远端插入内鞘管接头52的内腔,以带动转动件
相对于蜗杆23旋转。如图2所示,外壳21与操作件26之间设置有第二弹性件265,第二弹性件265与蜗杆23同步运动,当蜗杆23向近端运动时,第二弹性件265被压缩并发生形变;第二弹性件265产生的弹性回复力用于推动蜗杆23向远端运动。具体地,第二弹性件265收容于外壳21的收纳槽211内,且第二弹性件265相对的两端分别连接于操作件26的连接部261的近端及外壳21的端块210的内表面。操作件26用于接收外部拉力以带动蜗杆23以及第二弹性件265沿轴向向近端滑动;当外部拉力消失后,第二弹性件265产生的弹性回复力推动操作件26与蜗杆23向远端运动。本实施例中,第二弹性件265为弹簧,。
65.第二弹性件265靠近操作件26的一端套设有管状的护套267,护套267沿轴向延伸的长度大于导槽219沿轴向延伸的长度,第二弹性件265的远端沿轴向能在护套267内压缩或伸展。护套267的远端夹设于第二弹性件265的远端与操作件26的近端,护套267随操作件26一同滑动,护套267能防止第二弹性件265朝径向变形而进入导槽219内或穿过导槽219伸出至外壳21外。
66.如图2、图3-图8所示,将组装于一体的蜗轮25、蜗杆23、限位组件28及内鞘管接头52安装至外壳21内,具体地,蜗杆23的连接柱235连接于操作件26的连接部261的远端,第三限位部218支撑蜗杆23使所述蜗杆23能沿轴向滑动;引导部2105可滑动地插入开口2303内;将蜗轮25收容于外壳21的收纳槽211内,外壳21的第二环形板217可旋转地容置于蜗轮25的环形槽252;第二限位筋215支撑内鞘管接头52的管体521、内鞘管接头52的第一环形板522可旋转地容置于旋转槽214中,阻尼件27套装于内鞘管接头52的外周面。鞘管50的近端通过螺接方式固定连接于内鞘管接头52的远端,此时,鞘管50的内腔、蜗杆23的穿线通槽2301及外壳21的出线孔2101相互连通,形成穿线内腔201,以方便导线500的穿插。
67.如图2及图8所示,外壳21的远端设置有空心的软胶嘴2107,鞘管50穿设于软胶嘴2107;鞘管50的远端外围套设有外护套55,外护套55的近端插入到软胶嘴2107内。
68.请一并参阅图2-图3、图8、图9及图11,在取出装置100的具体操作过程中,医生将患者体内的导线500如电极导线的近端插入扩张头80中;医生抓握操控手柄20并向远端推动操控手柄20,使得鞘管50与扩张头80沿着所述电极导线逐渐进入患者的血管内;当向远端推动操控手柄20的阻力较大时,则说明扩张头80抵触到结合在导线500周围的组织了,向近端拉动操作件26带动蜗杆23沿轴向朝近端滑动,第一弹性件283弹性抵推限位杆281使抵触部2811与鞘管50的啮合部523卡接。蜗杆23朝近端滑动,单向螺旋槽231的内表面滑动地抵推蜗轮25的导滑销254,以带动蜗轮25旋转;由于蜗轮25通过限位杆281与内鞘管接头52卡接,因此,蜗轮25带动内鞘管接头52、鞘管50及扩张头80沿同一方向旋转,使扩张头80的锋利的刀刃对结合在导线500周围的组织进行切割;直至操作件26沿导槽219向近端滑动至连接部261抵顶导槽219的近端。所述蜗轮25旋转至所述蜗杆23的单向螺旋槽231的远端处,第二弹性件265被压缩而弹性变形。
69.在向近端拉动操作件26的整个过程中,蜗杆23带动蜗轮25及鞘管50同一方向旋转,能使扩张头80有效地切割包裹在导线500周围的纤维组织。导线500的近端沿穿线内腔201穿出外壳21,即导线500的近端依次穿过扩张头80、鞘管50的内腔及驱动件的穿线通槽2301后经引导部2105从外壳21的出线孔2101穿出。
70.请一并参阅图2、图3、图8、图10-图11,当解除对操控手柄20的拉力,即释放操控手柄20,第二弹性件265产生的弹力向远端推动操作件26带动蜗杆23沿轴向朝远端滑动,蜗轮
25旋转,限位杆281的远端在啮合部523的表面滑动,并且阻尼件27阻止内鞘管接头52随同限位杆281一同旋转,因此,蜗轮25相对于鞘管50旋转,即限位杆281与内鞘管接头52不卡接,鞘管50不会随蜗轮25旋转。从而减小了第二弹性件265回弹过程中的负载,有利于蜗轮25顺利的从单向螺旋槽231的远端滑动至近端。当操作件26沿导槽219滑动至抵顶导槽219的近端面时,第一弹性件283弹性推抵限位杆281,使抵触部2811与鞘管50的啮合部523卡接,从而实现第二弹性件265、操作件26以及驱动件回到初始位置,方便使用者朝近端再次拉动操控手柄20。
71.在其他实施例中,蜗轮25中省略单向限位组件28及鞘管50的啮合部523,蜗轮25与内鞘管接头52连接,内鞘管接头52的近端固定连接于蜗轮25的远端,或者内鞘管接头52与蜗轮25为一体结构。蜗杆23在向近端滑动的过程中,蜗杆23带动蜗轮25及鞘管50沿第一旋转方向旋转;蜗杆23在向远端滑动的过程中,蜗杆23带动蜗轮25及鞘管50沿第二旋转方向旋转,所述第一旋转方向与所述第二旋转方向相反。
72.具体地,向近端拉动操作件26以带动蜗杆23向近端滑动,单向螺旋槽231的内表面滑动地抵推蜗轮25的导滑销254,使带动蜗轮25、鞘管50及扩张头80沿第一方向旋转,使扩张头80的锋利的刀刃对结合在导线500周围的组织进行切割;当解除对操控手柄20的拉力,第二弹性件265弹性复位而向远端推动操作件26带动蜗杆23沿轴向朝远端滑动,单向螺旋槽231的内表面滑动地抵推蜗轮25的导滑销254,使蜗轮25带动内鞘管接头52、鞘管50及扩张头80沿第二方向旋转,使扩张头80有效地切割包裹在导线500周围的纤维组织。
73.需要说明的是,在不脱离本发明实施例原理的前提下,以上实施例中的具体技术方案,可以相互适用。
74.以上是本发明实施例的实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明实施例原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1