一种新式智能自动拔罐诊断与治疗系统的制作方法
1.本发明涉及智能在线诊断和治疗系统技术领域,特别是涉及一种新式智能自动拔罐诊断与治疗系统。
背景技术:
2.拔罐作为中医的治疗手段之一,经过长期的临床实践,证实其无论是在治病、防病还是在养生上都是有效可行的。但是现有拔罐治疗采用人工操作和经验方法,没有科学监测与量化手段,使很多人对其持怀疑态度。另外,通过调查发现,现阶段我国从事该行业的医疗人员人数较少,缺口较大,供不应求。而培养一个专业的拔罐人员需要的时间长,且不确定性因素较多,拔罐的效果也因人而异,因此当前对一种高效、科学且安全的智能拔罐仪器的需求迫在眉睫。
技术实现要素:
3.本发明的目的在于发明一种新式智能自动拔罐诊断与治疗系统,实现智能化、个性化、柔性化康复治疗。
4.本发明新式智能自动拔罐诊断与治疗系统包括拔罐工作模块、线束自收机构、数据处理可视化模块、负压控制模块和可移动机体,其中拔罐工作模块包括分体式罐体、多传感器模组与多自由度关节臂;线束自收机构包括两侧设有限位槽的滑轮支撑、两侧设有限位销轴的配重滑轮和小滑轮,其中配重滑轮和小滑轮两侧及正下方设有限位板;数据处理可视化模块包括中央控制器、显示器;负压控制模块包括真空发生器和中央控制器;可移动机体包括机体、脚轮、便捷推杆、显示器支撑及机体连接支撑。
5.更进一步地,分体式罐体由顶部开有传感器安装孔及导气孔的罐身和顶部开有集成线束安装孔的罐盖构成,罐身顶部设有用于安装传感器模组的安装区,罐身和罐盖同轴上下分布。
6.更进一步地,传感器模组包括压力传感器、位移传感器、表面张力传感器、微型摄像头、和远红外传感器,其中微型摄像头安装于罐身顶部的中心位置,其余传感器均布于微型摄像头四周。
7.更进一步地,罐体安放架可同时安装8个分体式罐体,每个分体式罐体安放区上方均有与多关节自由臂内部主线束通道相通的次线束通道。
8.更进一步地,罐体安放架上分体式罐体安放区设有罐体固定套,分体式罐体通过罐体固定套约束固定在罐体安放架上。
9.更进一步地,负压控制模块包括用于产生负压并维持负压的真空发生器及中央控制器,中央控制器通过线束与分体式罐体和真空发生器相连,真空发生器通过导气管与分体式罐体相连。
10.更进一步地,配重滑轮两侧限位销轴与滑轮支撑上的限位槽配合,限位销轴可在限位槽内上下移动,滑轮支撑顶部两侧安装小滑轮。
11.更进一步地,显示器支撑一端通过回转元件与固定在机体上的机体连接支撑相连接,另一端与显示器连接,显示器支撑各个关节均采用回转件连接。
12.本发明与背景技术相比:罐内内置微型摄像头用以采集罐印,获取不同区域罐印的特征,结合体质和基础疾病等信息,实现基于罐印的诊断;内置多种精密传感器以智能监测负压的大小,完善干预剂量的系统精准设定,解决拔罐治疗中无法精确控制拔罐力度难题;植入远红外热成像技术以监控罐印处皮肤温度,拔罐时罐区皮下血流量会相应发生变化,导致人体局部温度改变,以有效预防或减少皮肤损伤、淤血过多、水泡等副作用。
附图说明
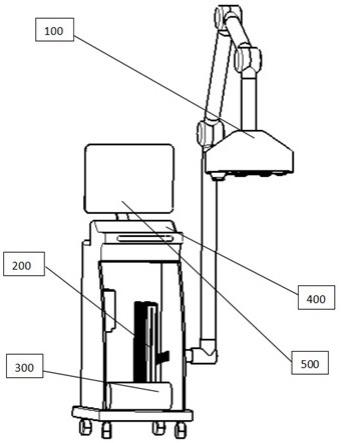
13.图1是本发明的一种新式智能自动拔罐诊断与治疗系统的外部及内部结构示意图;图2是本发明中分体式罐体的结构示意图,a为外部结构示意图,b为内部结构示意图;图3是本发明中线束自收机构的结构示意图,a为等轴侧视图,b为局部剖视图,c为局部放大图;图4是本发明中负压控制模块的结构示意图;图5是本发明中罐体安放架的结构示意图,a为外部示意图,b为剖视图;图6是本发明中拔罐工作模块的结构示意图;图7是本发明中可移动机体结构示意图。
具体实施方式
14.下面结合附图对本发明进行详细说明,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
15.如附图1-图7所示,本发明一种新式智能自动拔罐诊断与治疗系统包括拔罐工作模块100、线束自收机构200、数据处理可视化模块500、负压控制模块300和可移动机体400。所述拔罐工作模块100包括自由臂关节110、自由臂120、连接关节130、法兰盘140、罐体安放架150、分体式罐体160,其中罐体安放架150由安放架外壳151、罐体固定套152构成,分体式罐体160由罐盖161和罐身162构成;所述线束自收机构200包括小滑轮210、滑轮支撑220、配重滑轮230;所述数据处理可视化模块500包括中央控制器310、显示器410;所述负压控制模块300包括中央控制器310、线缆320、真空发生器330、导气管340以及分体式罐体160;所述可移动机体400包括显示器支撑420、机体连接支撑430、便捷推杆440、机体450、脚轮460。
16.进一步地,如附图2a所示,所述分体式罐体160由顶部开有传感器安装孔与导气管安装孔的罐身162和顶部开有集成线束安装孔的罐盖161构成,二者同轴上下分布。
17.进一步地,如附图2b所示,所述罐身162安装有压力传感器164、位移传感器165、表面张力传感器166、微型摄像头167、远红外传感器168,其中微型摄像头167安装于罐身162顶部的中心位置,其余传感器均布于微型摄像头167四周。
18.进一步地,如附图3、图6所示,所述配重滑轮230两侧限位销轴与滑轮支撑220上的限位槽配合,限位销轴可在限位槽内上下移动,滑轮支撑220顶部两侧设有滑轮安装区域用于安装小滑轮210。当分体式罐体160从罐体安放架150上取出,机体内部与各个分体式罐体160相连接的集成线束随着分体式罐体160的移动而拉伸,进一步的带动集成线束上的配重滑轮230沿着滑轮支撑220上的限位槽向上移动,当分体式罐体160重新放回罐体安放架150时,配重滑轮230将会沿着滑轮支撑220上的限位槽下移,同时带动缠绕在配重滑轮230上的集成线束下移,达到线束自动回收的目的。
19.进一步地,如附图4所示,所述真空发生器330和中央控制器310分别通过线束320和橡胶软管340与分体式罐体160相连,同时,真空发生器330和中央控制器310通过线束320相连通,形成闭环。接通电源后,设备启动,真空发生器330开始工作,待分体式罐体160接触人体时整个系统开始工作,真空发生器330阀门开启,分体式罐体160内部开始产生负压进行拔罐,同时,分体式罐体160内传感器模组中各个传感器开始工作,中央控制器310通过各分体式罐体160内部传感器模组感知分体式罐体160内部负压,并对分体式罐体160内部负压进行调节,各传感器采集患者皮肤状态的图像、影像及温度等信号后传递给中央控制器310进行分析处理,数据处理完毕后将在显示器410上进行显示,医护人员结合实时数据和现有的基于罐印的诊断体系进行个性化诊断。
20.进一步地,如附图5、图6所示,所述罐体安放架150上的罐体安放区153用于安放分体式罐体160,与各个分体式罐体160所连接的集成线束通过次线束通道155汇聚成总线束,再通过主线束通道154与中央控制器310相连。
21.进一步地,如附图5、图6所示,所述分体式罐体160通过置于罐体安放架150内的罐体固定套152进行固定。
22.进一步地,如附图7所示,所述显示器支撑420一端与显示器410相连,另一端与机体连接支撑430相连,同时机体连接支撑430与机体450相连,显示器支撑420和机体连接支撑430都可沿接头处轴线转动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1