一种柔性下肢外骨骼与助行器共融康复助力方法及装置与流程
[0001]
本发明涉及面向行动障碍患者,集康复训练配套设备领域,特别是涉及一种柔性下肢外骨骼与助行器共融康复助力方法及装置。
背景技术:
[0002]
助行器可以为行走障碍人群提供行走支撑,协助行走训练。目前,大多助行器依旧采用功能简单的纯机械结构,局限于助行器本体,依靠使用者本身肢体运动进行行走训练,容易肢体疲劳,产生厌烦情绪,缺乏训练热情,且大多数助行器不能进行跌倒预测,存在安全性差等问题。
[0003]
近年来康复外骨骼技术到飞速发展,能针对下肢瘫痪、脊髓损伤、中风患者进行有效的康复训练,使得患者的肌力得到有效恢复,但这些康复外骨骼系统大多为固定装备,康复训练情景单一,康复患者易出现运动疲态,且外骨骼机构大多笨重,便携性差。
[0004]
亟需一种既能够协助康复训练,又能激发使用者训练热情的新型康复助力系统。
技术实现要素:
[0005]
为了克服上述现有技术的不足,本发明提供了一种柔性下肢外骨骼与助行器共融康复助力方法及装置,可以实现外骨骼服与助行器协调共融康复助力,激发使用者的训练热情;外骨骼服与助行器融合康复助力,在帮助使用者稳定行走训练的同时,减缓使用者肢体疲劳;融入外骨骼服以及助行器运动信息的防跌倒反馈控制,从外骨骼服与助行器两个方面保证了使用过程中的安全性。
[0006]
为了实现上述目的,本发明采取如下技术方案:
[0007]
一种柔性下肢外骨骼服与助行器共融康复助力方法,包括:
[0008]
通过外骨骼服服获取套索力信息与下肢位姿信息;通过助行器获取肘托力信息、速度与里程信息;
[0009]
根据获取的所述获取套索力信息和下肢位姿信息进行使用者人体下肢运动意图判断,并生成与所述使用者人体下肢运动意图判断结果对应的第一操控指令;根据获取的所述肘托力信息和速度信息进行助行器方向与速度意识判断,并生成与所述助行器方向与速度意识判断结果对应的第二操控指令;根据获取的所有感知信息进行防跌倒预测,并生成与所述防跌倒预测判断结果对应的第三操控指令;
[0010]
根据所述第一操控指令或第三操控指令控制外骨骼服驱动单元做出与所述使用者人体下肢运动意图判断或防跌倒预测判断结果对应的机械运动;根据所述第二操控指令或第三操控指令控制助行器驱动单元做出与所述助行器方向与速度意识判断以及防跌倒预测判断结果对应的机械运动。
[0011]
一种柔性下肢外骨骼服与助行器共融康复助力装置,包括:
[0012]
传感感知模块,包括外骨骼服测力单元、姿态测量单元、助行器肘托测力单元以及速度与里程计量单元,用于分别用于获取套索力信息、下肢位姿信息、肘托力信息、速度与
里程信息;
[0013]
信息处理融合控制模块,包括外骨骼导纳助力控制单元、助行器导纳助行控制单元、防跌倒反馈控制单元;其中,
[0014]
外骨骼导纳助力控制单元用于根据获取的所述获取套索力信息和下肢位姿信息进行使用者人体下肢运动意图判断,并生成与所述使用者人体下肢运动意图判断结果对应的第一操控指令;
[0015]
助行器导纳助行控制单元用于根据获取的所述肘托力信息和速度信息进行助行器方向与速度意图判断,并生成与所述助行器方向与速度意图判断结果对应的第二操控指令;
[0016]
防跌倒反馈控制单元根据用于获取的所述传感感知模块获取的所有感知信息进行防跌倒预测,并生成与所述防跌倒预测判断结果对应的第三操控指令。
[0017]
驱动模块,包括外骨骼服驱动单元、助行器驱动单元;其中,
[0018]
外骨骼服驱动单元用于根据所述第一操控指令或第三操控指令控制外骨骼服驱动单元做出与所述使用者人体下肢运动意图判断或防跌倒预测判断结果对应的机械运动;
[0019]
助行器驱动单元用于根据所述第二操控指令或第三操控指令控制助行器驱动单元做出与所述助行器方向与速度意识判断以及防跌倒预测判断结果对应的机械运动;
[0020]
进一步的,助行器肘托测力单元位于助行器中扶手位置处;速度与里程计量单元由电机编码器组成;
[0021]
进一步的,所述外骨骼导纳助力控制单元,根据输入关节套索力信息经由理想导纳模型输出为关节参考速度,比例处理为电机驱动力矩形成第一操控指令。
[0022]
进一步的,所述助行器导纳助行控制单元主体为导纳控制器,模拟一种动态过程,根据输入的肘托力信息得出运动意图作为助行导纳模型的输入,输出线性控制速度与角度控制速度,二者形成第二操控指令。
[0023]
进一步的,利用助行器实际前进方向信息和使用者实际转矩意图方向信息之间的误差来实时改变所述导纳控制器的阻尼参数,实时调整助行导纳模型。;
[0024]
进一步的,所述防跌倒反馈控制单元,采用一种基于机器人插补运动规划的改进型防跌倒控制策略,该策略是先通过计算zmp检测跌倒状态,然后通过防跌倒控制将摆动脚快速移动到期望的位置以防跌倒,通过插补运动规划以及逆运动学求解,输出速度补偿量,形成第三操控指令;
[0025]
进一步的,外骨骼服驱动单元输出为外骨骼关节速度,通过lq控制器实现轨迹跟踪闭环控制;
[0026]
进一步的,外骨骼服驱动单元和助行器驱动单元,根据第三操控指令,实现外骨骼服和助行器在运动失稳状态下的同步协调快速补偿控制效果。
[0027]
与现有技术相比,本发明的有益效果是:
[0028]
在进行康复训练时,使用者穿戴外骨骼服落地行走康复训练,此时助行器上的把手和肘托为使用者提供行走支撑;采用柔性外骨骼服与助行器,可摆脱训练场景单一限制,通过本发明公开的控制方法和装置可以实现外骨骼服与助行器协调共融康复助力,激发使用者的训练热情;外骨骼服与助行器融合康复助力,在帮助使用者稳定行走训练的同时,减缓使用者肢体疲劳;融入外骨骼服以及助行器运动信息的防跌倒反馈控制,从外骨骼服与
助行器两个方面保证了使用过程中的安全性。
附图说明
[0029]
为了更清楚地说明本申请实施例的技术方案,下面将对本申请实施例中所需要使用的附图作详细介绍,以下附图仅示出了本申请的某些实施例,因此不应被看作是对范围的限定。
[0030]
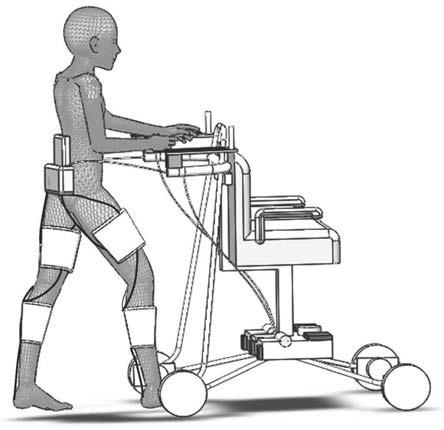
图1是本发明具体实施方式中一种柔性外骨骼服与助行器共融康复助力装置结构示意图;
[0031]
图2是本发明具体实施方式中所述外骨骼导纳助力控制单元、助行器导纳助行控制单元、防跌倒反馈控制单元的控制原理和过程示意图;
[0032]
图3是本发明具体实施方式中一种柔性外骨骼服示意图;
[0033]
图4是本发明具体实施方式中助行器肘托测力单元(即助行器扶手传感模块);
[0034]
图5是本发明具体实施方式中一个人机系统运动学模型。
具体实施方式
[0035]
为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本申请的实施例及实施例中的特征可以相互组合。
[0036]
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
[0037]
如图1所示,为提供了一种柔性下肢外骨骼服与助行器共融康复助力装置的较优实施例;
[0038]
具体的,在本实施例中,如图3所示,柔性下肢外骨骼服采用电机带动套索传动进行驱动,驱动电机内置在助行器底盘,减轻了穿戴者肢体负重,柔性套索线采用快速接头实现即插即用,减小穿戴复杂;在本实施例中所提出的助行器为类轮椅机构,后置把手为使用者提供行走支撑,前置座椅为使用者提供坐姿支撑,在不进行康复训练的时候可成为使用者的代步工具;所提出的柔性外骨骼服与助行器的共融控制策略,可实现穿戴者的按需助力,减少康复训练的疲劳感提高训练积极性。
[0039]
如图2所示,为外骨骼导纳助力控制单元、助行器导纳助行控制单元、防跌倒反馈控制单元的控制原理和过程示意图,以下分别对着三个控制单元的控制原理和过程进行详细的说明。
[0040]
(1)外骨骼导纳助力控制单元工作原理和过程;
[0041]
所述外骨骼导纳助力控制单元基于助力外骨骼导纳模型。导纳模型由人机交互力矩作为模型输入,导纳模型输入力矩经由导纳模型输出为关节参考速度,且通过lq控制器实现轨迹跟踪控制。外骨骼关节驱动系统的输入为电机驱动力矩,输出为外骨骼服腿部转动速度。
[0042]
所述理想导纳模型是线性时变系统,使用三阶状态方程建模,并使用欧拉法离散化。外骨骼服力矩传感器采集的力矩作为输入力矩τ
adm
经由理想导纳模型输出为关节参考
速度v
adm
,二者之间的关系为:
[0043][0044]
其中是有关理想导纳模型的理想弹性系数、理想阻尼系数、理想转动惯量和采样周期的一个三阶方阵,是有关理想导纳模型的理想转动惯量和采样周期的一个三维列向量。
[0045]
导纳模型生成的关节参考速度v
adm
采用比例控制的速度跟踪控制可表示为:
[0046][0047]
其中,由lq调节器生成,v
m1
由防跌倒反馈控制得出的外骨骼补偿速度。
[0048]
然后,将电机驱动力矩τ
m
输入关节驱动系统,输出外骨骼服关节速度v
exo
。
[0049]
(2)助行器导纳助行控制单元工作原理和过程
[0050]
所述助行器导纳控制是基于一种虚拟导纳调节器的控制方法。虚拟导纳调节器利用助行器实际前进方向和使用者实际意图方向之间的误差来实时改变导纳控制器的阻尼参数。
[0051]
用户的运动意图通过布置在助行器肘托处的力传感器确定,如图4所示,计算方式如下:
[0052][0053]
其中,f
lx
、f
rx
分别表示左右肘托处三维力传感器x轴方向的测量值,d表示两个传感器之间的横向距离。
[0054]
将肘托推行力f和意图扭矩τ的值作为助行器导纳模型的输入,输出为线性控制速度v
s
和角度控制速度ω
s
,之间的关系可根据如下导纳模型计算得出:
[0055][0056]
其中,质量m
v
、m
ω
以及阻尼d
v
、d
ω
都是导纳控制模型的参数,它们决定了使用者、助行器和环境之间的相互作用。
[0057]
进一步的,将上述得出的速度v
s
与补偿速度v
m2
的合速度作为线性控制速度和角度控制速度ω
s
一起导入助行器驱动系统,控制结果表现为沿着助行器前向方向速度v
x
和助行器横向方向上的速度v
y
。
[0058]
与传统导纳控制器相比,本发明中所述导纳调节器可根据输入量的动态改变实时调节参数。导纳调节器的输入为人体意图方向和助行器实际行进方向之间的夹角δθ,输出为导纳模型的阻尼参数d
v
,d
ω
。
[0059]
在本发明中,假定助行器实际行进方向与助行器前向方向x轴之间的夹角为行进方向角θ
s
,其值可通过助行器控制系统输出的前向速度v
x
和横向速度v
y
进行反三角函数求解求得。假定助行器意图方向与助行器前向方向x轴之间的夹角为意图方向角θ
p
,意图方向角θ
p
由意图方向信息通过助行器导纳模型输入扭矩进行比例处理得出。
[0060]
进一步的,本发明设计一种导纳调节器,输出导纳模型的线速度阻尼参数可表示为:
[0061][0062]
其中,d
v max
是d
v
的最大极限值,即线速度所需最大阻尼;d
d max
是速度阻尼的最大减少量,即速度阻尼最大极限值与最小极限值之间的差值;δ
v
是决定d
v
(t)值域的参数。
[0063]
进一步的,导纳模型的角速度阻尼参数可表示为:
[0064][0065]
其中,i
ω
是初始阻尼值,g
ω
是增益变化,k
ω
是d
ω
曲线的变化斜率。
[0066]
进一步的,设定:
[0067]
i
ω
>g
ω
,以避免d
ω
计算结果出现负值;
[0068][0069][0070]
k
ω
则由经验获得。
[0071]
进一步的,随着阻尼参数的动态变化,共同改变导纳模型的输出线性控制速度v
s
和角度控制速度ω
s
。
[0072]
(3)防跌倒反馈控制单元工作原理和过程。
[0073]
本发明基于零力矩点(zmp)的判别方法,进行人机系统在运动过程中的协同性和稳定性研究,进而实现防跌倒控制。
[0074]
所述防跌倒反馈控制环节,本发明采用一种基于机器人插补运动规划的改进型防跌倒控制。防跌倒控制策略为,首先进行跌倒状态预判,然后通过防跌倒控制将摆动脚快速移动到期望的位置以防跌倒。基于此,通过插补运动规划,摆动脚的运动可以由摆动脚从当前位置到期望地面接触点位置的初始速度来确定。
[0075]
为此,本发明进行下肢运动学建模,如图5所示。其中z
i
是模型关节的z轴,每个旋转关节围绕z轴旋转。根据各关节变量、关节连杆长度与关节偏移量这些参数通过d-h法进行正逆运动学求解,可以得出各关节变量和位姿关系。
[0076]
由于人体下肢运动具有高度复杂性,传统zmp计算公式需要计算下肢连杆模型的每个连杆质心的加速度,每部分必须视为独立末端,以获得线性和角加速度,为此,本申请使用简化模型:
[0077][0078][0079]
其中,x
com
、y
com
、z
com
分别为人机系统的质心(com)坐标,可由下列公式得出:
[0080][0081]
其中,m
j
是连杆模型各连杆部分的质量,x
j
、y
j
、z
j
是各部分的质心。
[0082]
进一步的,如图2控制策略图防跌倒控制部分所示,提出以下算法步骤实现防跌倒控制:
[0083]
①
判断距离com的最近脚:
[0084][0085]
②
根据得出使用者脚部的x与y轴的速度分量v
x
,v
y
。其中,cop
l
与cop
r
分别是左右脚压力中心点,其值可由左右脚的轨迹得出。
[0086]
③
通过比较左右脚地面反作用力分辨摆动脚,比如左脚具有较小的地面反力,即左脚处于摆动中或者即将抬起进入摆动状态,反之亦然。这里,地面反作用力可以通过机器人静力学方程计算得出。
[0087]
④
计算摆动脚落地z速度:
[0088][0089]
其中p
l
、p
r
是左右脚的位置向量,其值根据脚空间位姿的齐次变换矩阵得出。
[0090]
如若上述摆动脚不是离com最近的脚,则脚的速度取负值,即:
[0091]
v
x
=-v
x
,v
y
=-v
y
[0092]
进一步的,v
x
,v
y
,v
z
合成脚部的初速度矢量v
end
,从而进行插补运动规划。
[0093]
进一步的,使用者脚部的初速度矢量可通过人机系统动力学模型与下肢关节速度v
ad
获得。
[0094]
进一步的,将外骨骼服关节速度v
exo
与下肢关节速度v
ad
的差值作为外骨骼控制系统补偿,实现柔性外骨骼的失稳补偿控制。将助行器前向速度v
x
与使用者脚部的x轴方向速度分量v
x
的差值作为助行器控制系统补偿,实现助行器的失稳补偿控制。进而实现柔性外骨骼服与助行器关于运动失稳补偿的协调控制。
[0095]
本发明通过以上控制方式最终实现外骨骼服与助行器交互共融控制,达到协助使用者助力行走康复的目的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1