协同照射装置的制作方法
1.本技术涉及一种协同照射装置,例如用于放射疗法。
2.这种装置也被称为“协同机器人(cobot)”。
背景技术:
3.外放射疗法或术中放射疗法(iort:intraoperative radiotherapy)是治疗癌症的局部区域方法。外放射疗法或术中放射疗法与手术是最常见的癌症治疗方法,并且本身可以导致明显的缓解。外放射疗法或术中放射疗法可以单独使用或与手术和化疗联合使用。外放射疗法或术中放射疗法的适应症与肿瘤的类型、肿瘤的位置、肿瘤的阶段和靶(通常是患者中待治疗的区域)的总体状态有关。在一些情况下,外放射疗法或术中放射疗法具有在门诊患者基础上进行的优点,因为疗程可以持续时间短并且继发效应小于化疗的继发效应。
4.为此,放射疗法使用电离辐射(x射线、电子、质子等)通过影响癌细胞的再生能力来破坏癌细胞。照射旨在破坏所有肿瘤细胞,同时保护健康的周边组织。
5.然而,对于一些类型的癌症,通过x射线的治疗存在困难,即肿瘤的位置可能非常靠近优选避免照射的器官部分。
6.此外,已经变得明显的是,在非常短的时间段(通常小于一秒)内递送非常高的剂量对健康组织的危害比在更长的时间内(即,对于常规治疗模式,几秒或甚至几分钟)递送相同剂量或甚至更少剂量要小得多。例如在论文“the advantage of flash radiotherapy confirmed in mini-pig and cat-cancer patients[快速放射疗法的优点在迷你猪和猫癌患者身上得到证实]”,marie-catherine vozenin et al.,clin cancer res 2018,american association for cancer research(美国癌症研究协会)中描述了这种现象。
[0007]
特别地,这种治疗模式被指定为“快速放射疗法(flash radiotherapy)”。
[0008]
因此,快速放射疗法使得可以产生与常规放射疗法相同的疗效,同时限制可能的不期望的副作用。
[0009]
此外,快速放射疗法使得可以避免提前切除肿瘤,如果肿瘤不可手术(例如当肿瘤位于患者的颈动脉或胰腺附近时,由于影响神经系统的风险太大而不能手术),这是特别方便的。
[0010]
因此,快速放射疗法使得可以治疗更多种类的肿瘤,特别是通常不可手术(例如通过常规手段,例如通过解剖刀)的肿瘤。
[0011]
还需要准确地递送、测量和/或控制在非常短的时间段内施用的高剂量的电离辐射。对剂量和/或靶吸收的剂量率的不适当控制造成的影响可能导致健康细胞、组织或器官的破坏,并且由此产生的继发效应在一些情况下可能对处于风险中的器官具有有害影响。
[0012]
例如,文献ep 3071292描述了一种使用电离辐射进行放射治疗和/或放射生物学、能够使用快速模式的照射装置。因此,该装置包括离子或电子束直线加速器(通常称为“linac”)以及控制和致动电子器件,这些控制和致动电子器件能够在已经达到由操作者规
定的剂量时总体上停止电离辐射的发射,并且更特别地,该装置包括使用电离辐射的照射装置,该照射装置被配置成以准确且受控的方式在非常短暂的瞬间(也就是说,例如小于100ms、可能小于1ms、可能小于100μs、可能小于0.1μs)内、以包括在1mev至50mev之间的能量范围递送至少0.25gy(格雷)、优选为10gy的电离辐射剂量。它还涉及一种使用电离辐射的照射装置,该照射装置设置有功率脉冲控制系统,该功率脉冲控制系统能够产生在1mev至50mev之间的范围内可调节、以期望频率(f)进行脉冲的、脉冲持续时间(d)可调节的能量粒子束,并且能够在从几cm2(平方厘米)至10cm2的曝光场中递送至少250gy/s、可能500gy/s或甚至至少1000gy/s的吸收剂量率。
[0013]
在实践中,由辐射源(例如linac)发射的射束必须相对于靶以特定角度和特定距离施加。
[0014]
存在例如包括6轴机器人(6轴机器人的一端支承linac)的常规放射疗法装置。
[0015]
通常,医师将施加器定位在靶上(在患者上,或根据情况部分地在患者体内)并用手握住它。接下来,另一个医师移动该装置,以将linac出口处的辐射源连接至施加器。接下来,每个人都离开患者所在的房间,并且激活辐射以执行治疗。为此,人机界面(mmi)通常被安排在被称为“控制室”的房间中,该房间位于患者和照射装置所在的被称为“操作室”的房间旁边。然后,操作室配备有辐射防护掩体。
[0016]
例如,文献us 2019/0314645描述了一种放射疗法装置,该放射疗法装置包括6轴机器人,该6轴机器人被配置成将具有固定的施加器的治疗头对准至操作台。
[0017]
因此,由于linac必须根据特定的处方相对于靶(并且因此相对于施加器)定向,而装置非常重并且难以操纵,因此用于操纵照射装置的过程非常长且精细(delicate)。
[0018]
因此,已经开发了自动化装置,例如能够检测靶的装置,或者例如由外部系统引导的装置,或者(例如经由操纵杆)远程控制的装置。
[0019]
然而,这种装置不仅难以远程控制,而且对于医师来说能够直接操纵照射装置通常更令人愉快和实用。
[0020]
此外,为了执行快速放射疗法,必须具有比常规放射疗法更大的可用功率,从而在照射装置中产生更大的重量,这抵消了操纵装置的容易性。
技术实现要素:
[0021]
因此,本发明的目的是提供一种至少部分地克服上述缺点的使用电离辐射的照射装置,特别是用于放射疗法和/或放射生物学的照射装置。
[0022]
为此,根据第一方面,提供一种被配置成以快速或常规模式照射靶的照射装置,包括:
[0023]-6轴机器人,该6轴机器人包括基部和6轴臂,该6轴臂的第一端附接至基部,并且第二端被指定为自由端;
[0024]-照射系统,该照射系统包括微波频率源和由微波频率源供应的辐射源,该照射系统定位在6轴臂的自由端处;
[0025]-操纵手柄,该操纵手柄接合至辐射源;
[0026]-至少一个负载传感器,该至少一个负载传感器被放置在操纵手柄与6轴臂之间,或者可以在操纵手柄与辐射源之间;以及
[0027]-控制-致动单元,该控制-致动单元被配置成从负载传感器接收信息并且根据从负载传感器接收的信息来控制6轴臂。
[0028]
至少一个负载传感器将其所经受的负载转换成电信号。
[0029]
由负载传感器发送的电信号测量被转换成辐射源移动和定向控制。
[0030]
传感器在方向x上受到的负载被转换成用于在方向x上以取决于负载水平(也就是说,取决于由负载传感器在方向x上发送的电信号的幅度)的加速度和速度移动的指令。
[0031]
当位于方向y的轴上的两个负载传感器在相同的方向x上经受不同水平的负载时,水平的差异构成根据垂直于包含方向y的轴和方向x的平面的方向z施加的力偶,负载传感器位于方向y的轴上。
[0032]
这种负载水平差异引起由负载传感器在方向x上发送的信号的幅度的差异。
[0033]
这种电信号的幅度差异然后被转换成用于围绕方向z以取决于负载水平差异(也就是说,由两个负载传感器在方向x上发送的电信号的幅度的差异)的加速度和速度旋转的指令。
[0034]
因此,负载传感器能够对照射装置进行反馈控制,使得照射装置于是形成协同机器人或“cobot”,照射装置的操纵得到辅助。
[0035]
该装置可以例如由一个人操纵,而通常需要至少两个人来操纵常规装置。
[0036]
根据本发明,传感器因此能够解释医师的移动意图并补偿不同接口之间的应力,这为装置提供更好的人体工程学,即,使装置更容易操纵。
[0037]
因此,例如,照射装置被配置成至少采用使用配置以及用于存储和/或移动的配置,在使用配置中,6轴臂处于伸出位置,在用于存储和/或移动的配置中,6轴臂则处于折叠位置。在这种配置中,照射装置的紧凑性更好,这使得照射装置在需要时更容易移动。
[0038]
照射装置,更特别地是照射系统,包括操纵手柄。
[0039]
至少一个负载传感器被放置在操纵手柄与6轴臂之间。
[0040]
然而,如果将至少一个负载传感器放置在6轴臂与照射系统之间,则传递的负载非常大,因为位于6轴臂的自由端的照射系统的重量大约为150kg。
[0041]
因此,在特别实用以减小这些负载的示例实施方式中,至少一个负载传感器被放置在操纵手柄与辐射源之间。
[0042]
在有利的示例实施方式中,照射装置包括至少两个(可以是三个)负载传感器。
[0043]
操纵手柄包括例如固定的轮或环;然而,它可以包括能够将负载传递到至少一个负载传感器以移动和定向辐射源的装置的任何部分。
[0044]
轮可以例如围绕辐射源的出口,以不阻挡发射的辐射,从而无论医师的位置如何都可以为医师提供抓握。
[0045]
在示例实施方式中,照射装置特别地使得可以执行快速疗法。
[0046]
例如,在上述文献ep 3071292中详细描述了能够执行快速疗法的装置。
[0047]
这里特别地,为了执行快速疗法,需要具有最大的辐射功率。为了最大化可用功率,微波频率源因此被定位为尽可能靠近辐射源,这使得可以最小化微波频率源与粒子束加速器腔之间的电磁功率损耗,从而提供有用的辐射。
[0048]
凭借本发明,因此可以产生能够递送更多辐射功率的装置,因此能够执行快速疗法,但是该装置不会比已知的现有技术系统更笨重。
[0049]
此外,由于较高的相应重量,本领域技术人员对将微波频率源和linac型的辐射源两者定位在紧固在臂的端部处的同一组件中抱有反对偏见。
[0050]
事实上,在现有装置中,微波频率源通常用作辐射源的配重;这种布置促进装置的平衡,但导致微波频率电磁功率的高损耗。
[0051]
然而,由于此后可用6轴臂,实际上已经证明将微波频率源和辐射源两者定位在臂的端部处是可行的。
[0052]
然而,另一方面,优选的是限制可能由臂的端部处的其他部件引起的超重。
[0053]
这里,微波频率源是指被配置成产生频率为至少300mhz、优选地在电磁频率的s频带(即,在2ghz至4ghz之间)中、或在c频带(即,在4ghz至8ghz之间)中、或例如在x频带(即,在8ghz至12ghz之间)中的电磁场的电磁波源。
[0054]
照射系统例如被配置成发射电离辐射并在小于100ms或可以小于1μs递送至少一份剂量(至少20gy、例如30gy)的这种电离辐射。
[0055]
根据有利的示例实施方式,辐射源包括被称为linac的电子的直线加速器。
[0056]
照射系统例如被配置成通过重复频率(f)包括在10hz至1khz之间的脉冲发射电离辐射,每个脉冲具有例如包括在10ns至100μs之间的持续时间(d)。
[0057]
例如,这里,照射系统被配置成递送包括在1gy至10gy之间的每脉冲剂量。
[0058]
在有利的示例实施方式中,可能例如辐射源包括超快传感器,例如碳化硅或金刚石的固态传感器,或者具有一个或多个电离室的传感器,或者如果电离辐射是带电粒子(诸如电子或质子)的辐射,则超快传感器是例如电流互感器(即,例如bergoz牌的电流互感器)。
[0059]
这里,超快传感器优选地定位在电离辐射束的源的出口处,以被来自辐射源的全部辐射流穿过。
[0060]
以这种方式,超快传感器被配置成监测递送至靶的辐射剂量。
[0061]
这里,超快传感器是被配置成在小于0.01ns内并且在至少0.01gy/s、或甚至25gy/s、或甚至50gy/s、或优选地甚至250gy/s、又一种可能性是500gy/s或甚至1000gy/s的剂量通量下检测电离辐射剂量的传感器。
[0062]
这种传感器使得可以检测在小于0.01ns内并且在至少0.01gy/s、或甚至25gy/s、或甚至50gy/s、或优选地甚至250gy/s、又一种可能性是500gy/s或甚至1000gy/s的剂量通量下产生的电离辐射的剂量。
[0063]
在有利的示例实施方式中,照射系统包括壳体,微波频率源和辐射源被放置在该壳体中,并且操纵手柄紧固在该壳体上;至少一个负载传感器被插设在操纵手柄与壳体的表面之间。
[0064]
根据有利的选择,基部还包括稳定系统,该稳定系统被配置成补偿由定位在6轴臂的自由端处的照射系统引入的重量。
[0065]
稳定系统使得可以更好地补偿由于辐射系统的定位而引起的杠杆臂或悬臂效应,并且使得可以更大程度地到达6轴臂并避免装置的倾斜。
[0066]
稳定系统包括例如至少一个腿架。
[0067]
根据有利的方面,稳定系统还包括可伸缩板,该可伸缩板被配置成采取伸出位置和缩回位置,该板于是在伸出位置时与辐射相对。
[0068]
这种板例如使得可以避免辐射穿过分隔结构,例如装置所在的房间的地板,或者优选保护免受辐射的任何其他物体。
[0069]
基部还可以包括例如用于电离辐射源的电源,以使装置能够以快速模式操作。
[0070]
这里,电源是指高压电源。
[0071]
根据另一选择,基部还可以包括全向移动系统,例如包括轮。
[0072]
因此,照射装置可以在任何方向上移动。
[0073]
在有利的示例实施方式中,基部的轮是全向的。因此,移动系统使照射装置能够围绕垂直于装置在其上移动的地面的任何轴线进行旋转移动。特别地,装置本身因此可以旋转。基部的移动系统(特别是这种轮)还使得照射装置能够在地面上沿任何方向平移移动而不旋转。基部的全向轮还使得照射装置能够同时旋转和平移移动。这种移动系统的优点是照射装置在杂乱或受限的空间中就位的机动性。
[0074]
在示例实施方式中,照射装置(可选地例如照射系统)还包括施加器,该施加器被配置成紧固在辐射源的出口处。
[0075]
6轴臂的使用使得施加器能够根据医师的需要定位和取向,这使得辐射能够到达任何靶,无论靶在患者体内的位置如何。
[0076]
这里,施加器形成靶与辐射源之间的接口。
[0077]
施加器可以由面向靶的医师握持,而由6轴臂承载的辐射源由另一个医师带至连接到施加器。
[0078]
这种靠近可以是手动的,并且由6轴臂辅助,该6轴臂由施加在一个或多个负载传感器上的力机动化和控制,特别是通过操纵手柄。
[0079]
在另一示例实施方式中,辐射源的轴线与施加器的轴线的最终靠近和对准可以是自动化的。为此,照射装置包括例如连接系统,该连接系统包括用于施加器的至少一个位置基准以及传感器,该传感器优选地紧固至机器人,例如紧固至辐射源。
[0080]
传感器使得可以相对于辐射源定位施加器。施加器相对于辐射源的位置又使得可以控制承载辐射源的6轴臂的移动,以使辐射源与施加器的轴线对准,以对接施加器并自动紧固施加器,而无需操作者的特定动作。
[0081]
可替代地,尤其是对于非侵入性情况,施加器可以被手动地和/或经由一个或多个负载传感器间接地紧固至辐射源。
[0082]
因此,施加器不仅与辐射源对准而不直接接触,而且固定在辐射源的出口处。因此,医师可以通过操纵施加器或甚至被配置成移动辐射源并将力传递至一个或多个负载传感器的任何其他部件来在待治疗的靶上移动、定向和定位辐射源和施加器组。
[0083]
因此,在示例实施方式中,操纵手柄包括施加器。
[0084]
因此,这里,至少一个负载传感器被插设在施加器与照射系统壳体的表面之间。由此,施加器可以向至少一个负载传感器施加力,以用作操纵手柄。
[0085]
例如,当操纵手柄同时包括施加器和轮时,医师可以通过用一只手握住手柄而用另一只手握住施加器来施加高扭矩,使得他或她能够容易地操纵照射系统,并且特别是使施加器的自由端相对于靶更容易且更准确地定位。
附图说明
[0086]
在阅读参考附图通过非限制性的说明性示例给出的以下详细描述时,根据示例实施方式,本发明将被很好地理解并且其优点将更加清楚。
[0087]
图1是根据本发明的示例实施方式的照射装置的图形表示;
[0088]
图2是根据本发明的示例实施方式的快速照射装置的图;
[0089]
图3示出了图2的装置,其中臂伸出;
[0090]
图4示出了图3的装置,其中臂折叠,以便移动和收起它;以及
[0091]
图5示出了电离辐射源、负载传感器、操纵手柄和施加器的几何形状和界面的示例。
具体实施方式
[0092]
前述附图中表示的相同部分由相同的附图标记标识。
[0093]
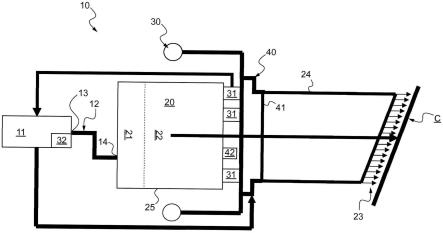
图1中图示地示出了用于照射靶c的照射装置10。
[0094]
照射装置10主要包括基部11和6轴臂12。
[0095]
6轴臂12包括第一端13和第二端14,6轴臂通过该第一端紧固至基部11,第二端被称为自由端。
[0096]
在第一端13处,6轴臂12包括例如被配置成将臂紧固至基部11的接口。
[0097]
这里,在6轴臂的自由端14处,6轴臂12设置有照射系统20。
[0098]
这里,照射系统20刚性地紧固至6轴臂12的自由端14。
[0099]
这里,照射系统20主要包括微波频率源21和由微波频率源21供应的辐射源22。
[0100]
这里,辐射源22被配置成发射射束23,例如电子束。
[0101]
辐射源22例如是直线加速器(linac)。
[0102]
照射系统20(可以是辐射源22)还包括被配置成监测递送至靶的辐射剂量的量的超快传感器(未示出)。
[0103]
这里,超快传感器优选地定位在电离辐射源的出口处,以使全部的辐射流穿其而过。
[0104]
这里,超快传感器是被配置成在小于0.01ns内并且在至少0.01gy/s、或甚至25gy/s、或甚至50gy/s、或优选地甚至250gy/s、又一种可能性是500gy/s或甚至1000gy/s的剂量通量下检测电离辐射剂量的传感器。
[0105]
这种传感器使得可以检测在小于0.01ns内并且在至少0.01gy/s、或甚至25gy/s、或甚至50gy/s、或优选地甚至250gy/s、又一种可能性是500gy/s或甚至1000gy/s的剂量通量下产生的电离辐射的剂量。
[0106]
超快传感器可以是碳化硅或金刚石的固态传感器,或者是具有一个或多个电离室的传感器,或者如果电离辐射是带电粒子(诸如电子或质子)的辐射,则超快传感器可以是例如电流互感器。
[0107]
在本示例实施方式中,照射系统20包括壳体25。这里,微波频率源21和辐射源22被限定在壳体25内。
[0108]
照射装置10还包括操纵手柄30,操纵手柄优选地接合至辐射源22。
[0109]
这里特别地,操纵手柄30紧固至壳体25。
[0110]
操纵手柄30例如包括形成手柄的环。
[0111]
为了使照射装置是协同的,照射装置10包括负载传感器31,这里包括三个负载传感器31。
[0112]
这里,负载传感器31被放置在操纵手柄30与辐射源22之间,并且这里更具体地,负载传感器31插设在操纵手柄30与壳体25的表面之间。
[0113]
在优选的示例实施方式中,三个传感器呈三角形设置。
[0114]
因此,当医师操纵操纵手柄30时,负载传感器31感测传递至操纵手柄30的负载并将对应的信号发送至控制-致动单元32。
[0115]
因此,控制-致动单元32控制6轴臂以与辐射源22相对于靶c的定位和取向协同。
[0116]
这里,控制-致动单元32被表示在基部11中。
[0117]
因此,控制-致动单元32被配置成从负载传感器接收信息并根据从负载传感器接收的信息来控制6轴臂。
[0118]
这里,照射系统20还包括定位在辐射源22的出口处的施加器24。这里,施加器借由紧固系统40被刚性地紧固至手柄30的一部分,紧固系统被配置成将施加器紧固在辐射源22的出口处。
[0119]
施加器24例如是管,例如有机玻璃管。
[0120]
在示例实施方式中,紧固系统40还包括对接系统41和位置传感器42。
[0121]
位置传感器42例如被放置在照射系统20上,并且优选地被放置在辐射源22上。
[0122]
如果施加器24由医师保持在与靶c相对的位置而尚未以任何方式连接在辐射源22的出口处,则紧固系统40被配置成致动6轴臂12,以在施加器被保持的位置处将辐射源22紧固至施加器24。
[0123]
位置传感器42检测施加器24的位置,将对应的信息发送至控制-致动单元32,该控制-致动单元控制6轴臂12以定位辐射源22,并且该控制-致动单元激活紧固系统40,以在辐射源22的出口处将施加器24紧固在其由医师保持的位置。
[0124]
因此,基部11至少包括控制-致动单元32。
[0125]
如图2所示,基部11还可以包括例如用于电离辐射源的电源33,以使装置能够以快速模式操作。
[0126]
基部11还可以包括全向移动系统34,该全向移动系统包括例如轮,这些轮例如是全向的(holonomic)。因此,照射装置10可以在任何方向上同时平移地和旋转地移动。
[0127]
最后,基部11优选地包括稳定系统35。
[0128]
稳定系统35被配置成以稳定的方式固定照射装置10。
[0129]
稳定系统35例如包括腿架,并且可以还包括可伸缩板(未示出),该可伸缩板被配置成具有伸出位置和缩回位置,板于是在伸出位置时被定位为与辐射相对。
[0130]
因此,这种板的存在使得可以在不同位置处使用照射装置,同时限制辐射穿过与辐射相对存在的分隔结构的风险。
[0131]
作为说明,图2至图4示出了处于不同配置的照射装置10。
[0132]
在图2中,照射装置10处于使用配置,其中施加器面向靶c定位。因此,6轴臂12处于伸出位置。
[0133]
在图3中,照射装置10也处于使用配置,其中施加器被定位为与靶c相对,但6轴臂
12则处于展开的伸出位置,即处于最大跨度。事实上,根据本发明的照射装置使得可以到达更多变化的区域以在靶c上进行治疗。
[0134]
在图4中,照射装置10处于用于存储和/或移动的配置。因此,6轴臂12处于折叠位置。由此,照射装置的紧凑性更好,这使得其能够更容易移动。
[0135]
图5更详细地示出了操纵手柄30和负载传感器31的示例实施方式。
[0136]
在该示例中,施加器24例如借由紧固系统40刚性地紧固、接合至操纵手柄30的一部分,该紧固系统是刚性的、在施加器24与操纵手柄30的一部分之间。
[0137]
因此,施加器形成操纵手柄30的一部分。因此,医师可以通过握住施加器24来移动和定位照射系统(20)。
[0138]
这里,操纵手柄30的一部分由轮301形成。
[0139]
因此,转向轮301壳体围绕辐射源22的出口,以不阻挡所发射的辐射。
[0140]
轮301刚性地连接至辐射源22,并且三个负载传感器31呈三角形、这里在同一平面上定位于轮301与辐射源22之间的连接接口。
[0141]
因此,负载传感器31被配置成将对应于经由手柄施加的负载的信号发送至控制-致动单元32,并且控制-致动单元32被配置成生产对应的信号以控制6轴臂12的移动,以与辐射源22相对于要瞄准的靶c的定位和取向协同。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1