鱼类疫苗自动注射机及自动获取鱼苗注射位置的方法
1.本发明涉及鱼类养殖装置,具体涉及一种可自动调节注射位置的鱼类疫苗自动注射机及自动获取鱼苗注射位置的方法。
背景技术:
2.随着食品安全日益受到重视,我国对水产养殖、鱼类防病的技术要求不断提高,对鱼类进行注射接种是鱼类防病的有效手段。目前我国对鱼类注射接种主要是靠人工进行的,费时费力,接种效率低。
3.现有技术中,存在能对畜禽和水产动物注射的自动化连续注射器,如申请号为201820149902.5的一种连续注射器针管组件,其能在雏鸡注射中实现自动推液,但其只能在固定位置注射,无法根据被注射对象与注射器的距离自动调节插针行程,也无法实现插针动作;申请号为201720319471.8的专利提供了一种鱼类疫苗自动注射机,其中介绍了一种自动注射机构,可以实现疫苗自动注射,但其无法根据被注射对象与注射器的距离自动调节插针行程,也无法实现定位,针筒在滑槽上易转动,互换性差;申请号为202010065117.3的专利提供了一种气动式疫苗连续注射装置,可以完成定位、插针和推液动作,并实现自动化疫苗注射,装置结构紧凑、刚度大、装配拆卸方便、成本低廉、适用场景广,但该装置无法实现精确定位。
技术实现要素:
4.本发明的目的在于提供一种可自动调节注射位置的鱼类疫苗自动注射机及自动获取鱼苗注射位置的方法,通过自动识别纺锤形鱼苗的注射位置,自动夹持和自动注射实现鱼苗的自动接种,有效提高鱼苗接种效率。
5.本发明采用的技术方案是:
6.一种鱼类疫苗自动注射机,包括机架(工作台),图像获取装置,夹持机构,注射机构和控制模块等。图像获取装置的入口端安装在工作台上,其出口端和夹持机构连接,所述图像获取装置上装有检测鱼苗信号的光电传感器;夹持机构安装在机架上,注射机构与夹持机构平行安装于机架上。注射机构包括注射器针头,夹持机构上开有狭缝;注射器针头对准夹持机构上的狭缝。所述控制模块与图像获取装置、夹持机构和注射机构相连,并对它们发出控制指令使其执行相应的动作。
7.上述技术方案中,进一步地,所述的机架包括支架、集鱼槽、放行槽和悬置架。集鱼槽呈盒状且一侧边缘上开有缺口,安装在支架上;放行槽安装在机架下侧,位于集鱼槽下方,用于接住从集鱼槽滑下的鱼;悬置架安装在机架上侧,用于安放控制模块和悬吊疫苗药液。
8.进一步地,所述的控制模块由plc、图像处理设备构成;所述图像处理设备用于处理图像获取装置的回传图像,并自动识别鱼的注射位置,然后与plc建立通讯,控制夹持机构动作。
9.进一步地,所述的图像获取装置包括工业相机、工业相机安装板、工业相机光源、万向竹节管、滑道、上安装基座、角度调节安装基座、光电传感器、挡鱼板、旋转气缸。工业相机通过螺栓连接固定在工业相机安装板,工业相机通过有线或无线传输方式和控制模块建立通讯,将拍摄的图片传回给控制模块;工业相机安装板、工业相机光源和万向竹节管通过螺纹连接在上安装基座上;滑道和上安装基座通过螺纹连接安装在角度调节安装基座上。所述角度调节安装基座一端固定在夹持机构一侧,夹持机构另一侧设置有圆弧形槽口,角度调节安装基座可沿槽口旋转至所需角度并通过螺栓连接固定;在滑道出口处开有小孔,对射型光电传感器安装在滑道出口处上下两侧,检测是否有鱼通过;挡鱼板通过螺纹连接安装在旋转气缸上,旋转气缸通过螺纹连接安装在上安装基座,旋转气缸由控制模块控制旋转。
10.进一步地,所述的夹持机构包括外壳、夹持执行部件和夹持调节部件,具体参见专利《一种纺锤形鱼类注射用的自动夹持装置》,专利号2020214311628,这里不再赘述。
11.进一步地,所述的注射机构包括直线运动机构、注射执行机构。所述的注射机构包括固定连接的直线运动机构和注射执行部件,直线运动机构包括但不限于丝杆滑台、电动推杆、直线电机等能够实现直线运动的常用组合机构,直线运动机构让注射执行部件移动到指定注射位置,准确、方便注射长度不同的鱼。所述注射执行机构参见专利《一种鱼类注射用的自动注射装置》,专利号2020214311149,这里不再赘述。
12.所述的控制模块由plc、图像处理设备构成。可以为plc、计算机、工控机、单片机以及其他控制装置、图像处理设备。
13.本发明还提供一种自动获取鱼苗注射位置的方法,基于上述的鱼类疫苗自动注射机实现,所述的控制模块通过图像获取装置获取鱼苗图像,并确定鱼苗的注射位置的方法,包括以下步骤:
14.s1、用畸变矫正算法矫正工业相机镜头带来的畸变效应,使图像中鱼苗与现实中的鱼苗比例一致或使误差在1~3个像素点之内;
15.s2、制作数据集。利用s1矫正过后的工业相机,拍摄多组包括但不限于不同环境、光照、不同尺寸范围、不同水流大小影响、不同弯曲体态等多变量影响下的鱼苗照片,并进行特征标注(包括但不限于鱼的种类、鱼的整体轮廓、鱼眼、鱼嘴、腹鳍、背鳍、尾鳍、臀鳍、尾柄等),并标注各个特征部位的位置和范围信息。
16.s3:根据s2制作的数据集,利用服务器、工控机等计算机设备进行深度学习的模型训练(选用的深度学习的模型可以是多种多样的,包括但不限于faster r
‑
cnn、ssd、yolo等目标检测的深度学习模型),最终获得能够识别鱼的种类信息、特征部位位置和范围信息的深度学习模型。
17.s4、利用控制模块(200)中的图像处理设备,载入s3获得的深度学习模型,对图像获取装置获取得到的鱼苗图像进行特征部位识别(包括但不限于鱼的整体轮廓、鱼眼、鱼嘴、腹鳍、背鳍、尾鳍、臀鳍、尾柄等),获取鱼的种类信息、特征部位中心位置和范围信息。
18.s5、当注射位置的点位恰好是s4所述的特征部位中心点或者在其附近(偏离2
‑
3mm以内)、并且能够识别得到对应的特征部位的中心点时,可直接识别获得注射位置,并对鱼苗的注射位置信息进行输出;否则继续进行步骤s6
‑
s8;
19.s6、根据s4获取鱼的种类信息、特征部位(包括但不限于鱼的整体轮廓、鱼眼、鱼嘴
末端、腹鳍、背鳍、尾鳍、臀鳍、尾柄等)的位置和范围信息,通过后处理计算方法获得鱼苗的形态参数信息(包括但不限于鱼的体长、总长、总宽、鱼嘴末端至鱼尾柄、尾巴中心的距离、鱼眼中心至鱼尾柄、尾巴中心距离、背鳍至腹鳍距离)。
20.所述的形态参数信息依赖于鱼的种类信息、特征部位中心位置和范围信息获得,例如,总宽即为腹鳍中心至背鳍中心的距离,类似的形态参数信息获取方法不再赘述。
21.所述的后处理计算方法为:由于鱼体偶尔存在弯曲的情况,对获取得到的鱼眼、鱼嘴、腹鳍、背鳍、尾鳍、臀鳍、尾柄等特征部位的中心位置点,做回归拟合(可以是一次、二次或更多次回归)得到一条近似贯穿鱼苗中心并连通鱼嘴、鱼眼、尾柄、尾鳍中心的中心拟合曲线,将该中心拟合曲线等距拆分成多段线近似表示,从而得到鱼体中心拟合曲线的一系列关键点,从而依据这些关键点和特征部位的中心点,准确计算鱼的各类形态参数信息。
22.s7、事先测量不同种类的鱼苗的形态参数(包括但不限于鱼的体长、总长、总宽、鱼嘴末端至鱼尾柄、尾巴中心的距离、鱼眼中心至鱼尾柄、尾巴中心距离,背鳍至腹鳍距离)和注射位置信息,建立不同种类的鱼苗的形态参数和注射位置信息之间的数学回归模型,得到注射位置回归模型。
23.s8、通过获得的鱼苗形态参数,借由注射位置回归模型间接得到注射位置;输出鱼苗的注射位置信息。
24.步骤s6
‑
s8为间接识别,当注射位置的点位由于杂物、遮挡等原因,无法通过s1
‑
s5所述直接识别得到特征部位中心点时,则通过获得鱼苗形态参数,借由注射位置回归模型间接得到注射位置。此时,图像处理设备根据s6所述,即可获得鱼苗形态参数,结合s7事先建立的鱼苗形态参数与鱼苗注射位置信息之间的数学模型,即可间接计算得出鱼苗注射位置信息。
25.与背景技术相比,本发明具有的有益效果是:
26.本发明实现对纺锤形鱼苗的注射位置自动识别、自动夹持和自动注射,自动化程度高、注射成功率高、适应性广、可靠性强,工作前通过调节,可以适应不同品种、不同大小的纺锤形鱼苗,有效提高鱼苗自动化接种效率。本发明可实现草鱼、鲢鱼等类似体型的鱼苗的疫苗自动识别注射位置及注射。
附图说明
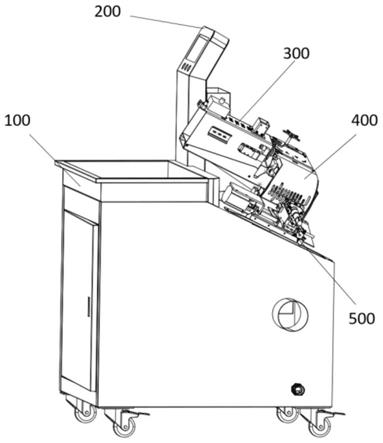
27.图1是本发明等轴侧图;
28.图2是机架(工作台)等轴测图;
29.图3是图像获取装置等轴测图;
30.图4是注射机构的等轴测图;
31.图中:
32.100、工作台,110、支架,120、集鱼槽,130、放行槽,140、悬置架
33.200、控制模块
34.300、图像获取装置,310、工业相机,311、工业相机安装板,320、工业相机光源,330、万向竹节管,340、滑道,350,上安装基座,360、角度调节安装基座,370、光电传感器,380、挡鱼板,390、旋转气缸。
35.400、夹持机构,包括外壳、夹持执行部件和夹持调节部件,具体见专利《一种纺锤
形鱼类注射用的自动夹持装置》,专利号2020214311628,这里不再赘述;
36.500、注射机构,510、直线运动机构,520、注射执行机构(构件组成见专利《一种鱼类注射用的自动注射装置》,专利号2020214311149,这里不再赘述);
具体实施方式
37.下面结合附图和实施例对本发明作进一步说明。
38.如图1所示为本发明的一种可自动调节注射位置的智能化鱼类疫苗自动注射机,包括机架100,控制模块200,图像获取装置300,夹持机构400,和注射机构500;图像获取装置300的入口端安装在机架100上,其出口端和夹持机构400连接,所述图像获取装置300上装有检测鱼苗信号的光电传感器340;夹持机构400安装在机架100上,注射机构500与夹持机构400平行安装于机架100上;所述控制模块200与图像获取装置300、夹持机构400和注射机构500相连,并对它们发出控制指令使其执行相应的动作。注射机构500包括注射器针头,夹持机构400上开有狭缝;注射器针头对准夹持机构400上的狭缝。
39.如图2所示,所述的机架100包括支架110、集鱼槽120、放行槽130和悬置架140;集鱼槽120呈盒状且一侧边缘上开有缺口,安装在支架110上;放行槽130安装在机架100下侧,位于集鱼槽120下方,用于接住从集鱼槽120滑下的鱼;悬置架140安装在机架100上侧,用于安放控制模块200和悬吊疫苗药液。
40.所述的控制模块200由plc、图像处理设备构成;所述图像处理设备用于处理图像获取装置300的回传图像,并自动识别鱼的注射位置,然后与plc建立通讯,控制夹持机构400动作。
41.如图3所示,所述的图像获取装置300包括工业相机310、工业相机安装板311、工业相机光源320、万向竹节管330、滑道340、上安装基座350、角度调节安装基座360、光电传感器370、挡鱼板380、旋转气缸390;工业相机310通过螺栓连接固定在工业相机安装板311上,工业相机310用于拍摄图片并将图片传给控制模块200;所述工业相机安装板311、工业相机光源320和万向竹节管330通过螺纹连接在上安装基座350上;滑道340和上安装基座350通过螺纹连接安装在角度调节安装基座360上;所述角度调节安装基座360一端固定在夹持机构400一侧,夹持机构400另一侧设置有圆弧形槽口,角度调节安装基座360可沿槽口旋转至所需角度并通过螺栓连接固定;在滑道340出口处开有小孔,对射型光电传感器370安装在滑道340出口处上下两侧,检测是否有鱼通过;挡鱼板380通过螺纹连接安装在旋转气缸390上,旋转气缸390通过螺纹连接安装在上安装基座350,旋转气缸390由控制模块200控制旋转。
42.如图4所示,所述的注射机构500包括固定连接的直线运动机构510和注射执行部件520,直线运动机构510用于使注射执行部件520移动到指定注射位置,准确、方便注射长度不同的鱼。
43.本发明的工作过程如下:
44.第一步,鱼苗通过万向竹节管330中水的冲刷、经由滑道340进入图像获取装置300,此时挡鱼板380处于初始闭合状态,鱼苗被拦截至工业相机310正下方,工业相机310将拍摄图像回传给控制模块200中的图像处理设备,控制模块200中的图像处理设备使用本发明提供的一种自动获取鱼苗注射位置的方法对图像进行处理获得鱼苗的注射位置,图像处
理设备将得到的注射位置转换为注射机构500中的直线运动机构510运动的直线距离,并控制注射执行机构520移动对应注射位置。
45.第二步,控制模块200控制旋转气缸390运动,挡鱼板380开启,鱼苗在万向竹节管330中水的冲刷作用和自身粘液的润滑作用下,离开图像获取装置300通过光电传感器370并进入夹持机构400左侧,控制模块200检测到光电信号,即认为鱼苗已经进入预备注射状态,此时控制模块200控制旋转气缸390运动,挡鱼板380关闭,等待下一条鱼苗进入图像获取装置300等待识别。与此同时,控制夹持机构400和注射执行机构500完成对当前鱼苗的夹持、注射和放行动作,然后,对等待识别的鱼苗重复上述步骤,即可完成连续自动注射。
46.本发明自动获取鱼苗注射位置的方法如下:
47.s1、用畸变矫正算法矫正工业相机镜头带来的畸变效应,使图像中鱼苗与现实中的鱼苗比例一致或使误差在1~3个像素点之内;
48.s2、制作数据集;利用s1矫正过后的工业相机拍摄多组多变量影响下的鱼苗照片,并进行特征标注,包括鱼的种类、特征部位的位置和范围信息;所述特征部位包括鱼的整体轮廓、鱼眼、鱼嘴、腹鳍、背鳍、尾鳍、臀鳍、尾柄;
49.s3:根据s2制作的数据集,利用计算机设备进行深度学习的模型训练,最终获得能够识别鱼的种类信息、特征部位位置和范围信息的深度学习模型;
50.s4、采用s3获得的深度学习模型对鱼苗图像进行识别,获取鱼的种类信息、特征部位的位置和范围信息;
51.s5、当注射位置的点位恰好是特征部位的中心点或者偏离2
‑
3mm以内、并且能够识别得到对应的特征部位的中心点时,可直接识别获得注射位置,并对鱼苗的注射位置信息进行输出;否则继续进行步骤s6
‑
s8;
52.s6、根据s4获取鱼的种类信息、特征部位的位置和范围信息,通过后处理计算方法获得鱼苗的形态参数信息;所述鱼苗的形态参数包括鱼的体长、总长、总宽、鱼嘴末端至鱼尾柄、尾巴中心的距离、鱼眼中心至鱼尾柄、尾巴中心距离、背鳍至腹鳍距离;
53.所述的后处理计算方法为:对获取得到的鱼眼、鱼嘴、腹鳍、背鳍、尾鳍、臀鳍、尾柄这些特征部位的中心位置点,做回归拟合得到一条贯穿鱼苗中心并连通鱼嘴、鱼眼、尾柄、尾鳍中心的中心拟合曲线,将该中心拟合曲线等距拆分成多段线近似表示,从而得到鱼体中心拟合曲线的一系列关键点,从而依据这些关键点和特征部位的中心点,准确计算鱼的各类形态参数信息;
54.s7、事先测量不同种类的鱼苗的形态参数和注射位置信息,建立不同种类的鱼苗的形态参数和注射位置信息之间的数学回归模型,得到注射位置回归模型;
55.s8、通过获得的鱼苗形态参数,借由注射位置回归模型间接得到注射位置;输出鱼苗的注射位置信息。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1