一种与内窥镜配套的机器人动力机构的制作方法
1.本发明涉及机器人的机械牵引动力系统领域,具体地说是在医用内窥镜的预留通道中分別先后插进手术刀、夹钳等不同构件,插进的构件非常小巧、且需要完成不同的动作,必须在体外由动力系统牵引。
背景技术:
2.人体的检查和手术常常需要在内窥镜下进行。比如,检查、治疗胃的病变可将内窥镜导管从口腔插入胃,内窥镜能弯曲、有光通道、摄像头,体内状况由显示屏读取。内窥镜导管中还有预留通道供其他导管、手术器械穿过预留通道中插入胃中,穿过内窥镜预留通道进入胃的构件头部需要弯折、各构件分别需要完成不同的动作。
3.内窥镜预留通道非常小,穿过预留通道进入人体的手术头部各构件必须更小巧。
4.手术头部每一个构件完成一个动作必须有一根拉丝牵引,通常可以用一个电动机牵引;动作完成后必须复位、由于非常小巧在构件上容纳不下复位弹簧,为了使手术头部的机构复位必须再用一根拉丝牵引,就还要用一个电动机牵引。这样电动机及配套机构增加到了2倍。
5.手术头部多个机构要完成多个动作,就需要多对拉丝,就需要有多组成对的电动机和多对配套机构。这样结构就十分复杂,需要改进。
6.手术头部的机构复位、弹簧又无法安装在体内,能否安装在体外、从而省去一个电动机及配套牵引机构,这是一条改进思路。另外手术头各机构要完成多个独立的动作、并复位,必定需要多组动力机构、多组建动力系统来完成。但至今未见相关产品和专利问世。
技术实现要素:
7.本发明正是为上述需要而发明的一种与内窥镜配套的机器人动力机构。
8.本发明创造发明的范围:
9.本发明不包括内窥镜、不包括从内窥镜预留通道插入人体内部的手术头各机构,不包括机器人控制系统硬件、软件创新,以上创新分别另申请多项专利。
10.本发明创新是:电动机、丝杆、滑块、运动直角件、静止的直角件、钻夹头、拉丝、套管、弹簧、基板等构成独特的动力装置的创新,这种创新的动力装置适合密集排布成动力系统。
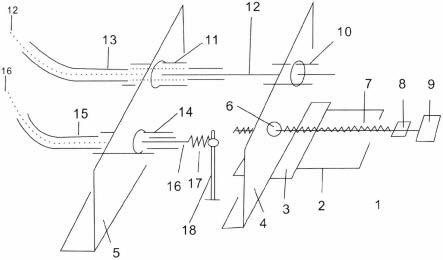
11.本发明的特征在于由以下部件构成:基板(1)上固定有导轨(2),滑块(3)能在导轨(2)上滑动,运动的直角件(4)固定在滑块(3)上随滑块(3)运动,静止的直角件(5)固定在基板(1)上不动,运动的直角件(4)的竖直平面上开孔并固定有螺帽(6),丝杆(7)穿过螺帽(6)和穿过竖直平面,丝杆(7)与螺帽(6)匹配,连轴器(8)与丝杆(7)和电动机(9)的轴相匹配,电动机(9)依托支架与基板(1)固定,运动的直角件(4)的竖直平面上开有孔、第一钻夹头(10)穿过孔、且与竖直平面固定,静止的直角件(5)的竖直平面上开有孔、第二钻夹头(11)穿过孔、且与竖直平面固定,第一拉丝(12)向右穿过第一钻夹头(10)、向左穿过套管(13)直
至与左端需要垃动的手术器械构件相连,套管(13)穿过第二钻夹头(11),当拧紧第一钻夹头(10)的螺母时第一钻夹头恰能夹住第一拉丝(12),当拧紧第二钻夹头(11)的螺母时第二钻夹头(11)恰能夹住套管(13)。
12.静止的直角件(5)与基板(1)固定不动,所述静止的直角件(5)的竖直平面上开有孔、第三钻夹头(14)穿过孔、且与静止的角件(5)的竖直平面固定,第二套管(15)穿过第三钻夹头(14)、当拧紧第三钻夹头(14)的螺母时、第三钻夹头(14)恰能夹住第二套管(15),第二拉丝(16)向左穿过第二套管(15)直至与左端手术器械相连、第二拉丝(16)的右端与弹簧(17)的左端相连。
13.基板(1)上固定有导轨(2),所述基板(1)上固定有立柱(18)、立柱(18)与弹簧(17)的右端相连。
14.钻夹头的左边部分(19)比孔大、钻夹头不会被向右拉出、钻夹头中间部分(20)有外螺纹,当右端有内螺纹的螺母(21)拧紧在钻夹头中间部分外螺纹上时钻夹头恰能能把细圆柱状的构件(22)夹住,所述把细圆柱状的构件(22)夹住就是把本发明创造的拉丝、套管夹住。
15.本发明创造所用拉丝不会因受拉力而伸长但可弯曲,本发明创造所用套管不会因受压力而被压瘪、变短但可以弯曲。第一拉丝(12)、套管(13)、第二拉丝(16)、第二套管(15)被包裹在同一根保护管内。
16.用一根拉丝可以实现一个特定动作、复位还需用另一根拉丝。比如:左端的一节手术器械构件(m)如果需要向上弯折,本发明创造用一根拉丝和连接有弹簧的另一根拉丝来实现一个特定动作和复位动作。
17.第一拉丝(12)向左穿过套管(13)、直至左端的一节手术器械构件(m)、并且相互固定。
18.第二拉丝(16),向左穿过第二套管(15)直至左端的一节手术路械构件(m)、并且相互固定。
19.当电动机正转时连轴器、丝杆也正转,第一拉丝(12)的右端随运动的直角件、滑块、第一钻夹头(10)一起向右运动,第一拉丝(12)被拉紧,如果此时第二拉丝(16)恰能伸长,左端被牵引一节手术器械构件(m)必定向上弯折,此时恰好弹簧(17)能伸长、从而巧妙地起到相当于第二拉丝(16)伸长的效果。
20.当电动机反转时连轴器、丝杆也反转,第一拉丝(12)的右端随运动的直角件、滑块、第一钻夹头(10)一起向左运动,第一拉丝(12)被放松,如果此时第二拉丝(16)恰能缩短,左端被牵引的一节手术器械构件(m)必定复位至水平位置,此时恰好弹簧(17)在弹力作用下能缩短、从而巧妙地起到相当于第二拉丝(16)缩短的效果。
21.以上仅仅是一个案例:为使手术头完成一个动作、并复位,需要一组完整的动力装置。实际上手术要完成多个动作、每个动作要位,必须由多组动力装置构成动力系统。
22.本发明构成密集排布动力系统技术方案:由于拉丝和套管可弯曲,在第一组动力装置的右边基板上可再安装相同的第二组动力装置,在第一组动力装置的下边基板上可以安装相同的第三组动力装置,在第三组动力装置的右边基板上可以安装相同的第四组动力装置,还可安装更多相同的下一组动力装置。所述基板是同一块较大基板,由此构成密集排布的动力系统,拉丝、套管可以弯曲后从旁边巧妙地绕过前面部件、使各拉丝拉动左端的手
术头上对应机构。前面部件不会阻挡后面部件。
23.本发明创造可用类比来理解:自行车的杀车采用能弯曲而不会压瘪的套管中穿钢丝,通过拉钢丝、使远端的杀车橡胶压紧车轮的钢圈、使车轮止动,放松钢丝、在弹簧作用下杀车橡皮复位。
24.与自行车杀车不同的是:因进入人体通道很小、弹簧无法放入体内器械中、只能巧妙地置于体外,但必须由两根拉丝进入体内才能完成1个动作、并复位。
25.本发明套管为很细的空心的、不会被压瘪、不会受到压力而缩短的但能弯曲的毛细管,拉丝不因受拉力而伸长但能弯曲,拉丝更细、恰能从毛细管中穿过,多组套管、拉丝的外面被同一根保护管所包裹后,再穿过内窥镜的预留通道进入人体。分别拉动不同拉丝完成不同的手术动作。
26.本发明动力系统用电动机、丝杆、滑块再配单片机适合智能控制,电动机正反转、牵引力度、速度、时间、电动机转的圈数通过编程都能实现。
27.本发明巧妙之处在于:钻夹头原来是夹钻头的,本发明创造用静止的钻夹头夹住套管、使套管静止不动,用运动的钻来头、夹住拉丝、并将拉丝从静止套管里往外拉。静止的钻夹头与固定在基板上的静止直角件固定,运动的钻夹头与运动的直角件固定并与滑块、丝杆、与电动机配合。拉丝与能弯曲的套管配合构成动力装置、进而构建可密集排布的动力系统。
28.由于拉丝和套管可弯曲,在第一组动力装置的右边基板上可再安装相同的第二组动力装置,在第一组动力装置的下边基板上可以安装相同的第三组动力装置,在第三组动力装置的右边基板上可以安装相同的第四组动力装置,所述基板是同一块较大基板,由此构成密集排布的动力系统,拉丝、套管可以弯曲后巧妙地从旁边绕过前面部件、从而各拉丝可以拉动左端的手术头上对应的机构,前面部件不会阻挡后面部件。
29.本发明可非常方地实现部分构件一次性使用。只要拧松钻夹头螺母,拉丝、套管极易更换,从而实现手术头部各构件更换,从而实现拉丝、套管、手术头部构件一次性使用。
附图说明
30.图1、本发明整体结构图。本图是权利要求书对照图。
31.图2、本发明所述钻夹头、直角件、拉丝相配合的结构和效果图。
32.钻夹头插入直角件竖直平面上的孔中,钻夹头左边部分(19)比孔大、不能被向右拉出,钻夹头中间部分(20)有外螺纹、钻夹头可与竖直平面固定,右边的螺帽(21)有內螺纹、螺帽(21)拧紧在钻夹头外螺纹上时钻夹头恰能把细圆柱状的构件(22)夹住,所述细圆柱状构件即本发明创造中的拉丝、套管。
33.图3、本发明所述钻夹头图。
34.图4、本发明与被拉动的左端一节手术器械构件(m)协调动作的案例图。
35.在此仅举一案例,左各种手术器械构件完整、详细结构另申请专利。
36.案例,动作目标是:拉动左端的一节手术器械构件(m)向上弯折,弯折动作所绕的关节点(23)。
37.套管限位构件(24)限制套管向左,套管中的拉丝穿过套管限位构件上的小孔、直至左端各个需要拉动的构件。
38.第一拉丝(12)在套管以外的部分(l),第二拉丝(16)露出套管左端的部分(a)。
39.第一拉丝(12)向左穿过套管(13)、直至左端的一节手术器械构件(m)、并且相互固定,第二钻夹头(11)固定在静止直角件(5)上、并把套管(13)夹住,套第(13)静止不动
40.第一钻夹头(10)把第一拉丝(12)的右端夹住,第一拉丝(12)的右端随第一钻夹头(10)、运动的直角件(4)、滑块(3)运动。
41.第二拉丝(16),向左穿过第二套管(15)直至左端的手术器械构件(m)、并且相互固定,向右与弹簧(17)的左端相连,第三钻夹头(14)固定在静止的直角件(5)上并把套管(15)夹住。
42.套管(13)、第二套管(15)可采用极细的空心毛细管,套管不易压瘪、变短、但能弯曲,拉丝不易受拉力而伸长。
43.套管(13)、第二套管(15)被包裹在同一根略粗的保护管中,其他必须的拉丝和套管也都被包裹在上述同一根略粗的保护管内。
44.动作原理和过程:
45.当电动机、连轴器、丝杆正转时,第一拉丝(12)的右端随运动的直角件、滑块、第一钻夹头(10)向右运动,第一拉丝(12)被拉紧,第一拉丝(12)的左端在套管以外的部分(l)缩短,第二拉丝(16)的露出导管左端的部分(a)伸长、弹簧(17)伸长,最左端的一节手术器械构件(m)向上弯折。
46.当电动机、连轴器、丝杆反转时,第一拉丝(12)右端随运动的直角件、滑块、第一钻夹头(10)向左运动,第一拉丝(12)被放松,第一拉丝(12)的左端在套管以外的部分(l)增长,第二拉丝(16)的露出左端套管的部分(a)受弹簧(17)的弹力作用而缩短,最左端的一节手术器械构件(m)向中间复位。
47.若要使最左端的一节手术器械构件(m)向下弯折可这样调节:第二拉丝初始长度取值应较短、使弹簧处于预拉状态,第一拉丝初始长度应较长,使左端一节手术器械构件(m)初始状态就处于向下弯折状态。电动机正转,第一拉丝拉紧,第一拉丝(12)的左端在套管以外的部分(l)缩短,第二拉丝(16)的露出套管左端的部分(a)伸长、弹簧(17)伸长,最左端的一节构件向上弯折至水平状态。若电动机继续正转,第一拉丝(12)的左端在套管以外的部分(l)进一步缩短,第二拉丝(16)的露出导管左端的部分(a)进一步伸长、弹簧(17)进一步伸长,最左端的一节手术器械构件(m)呈向上弯折状态。若电动机反转,最左端的一节手构件(m)在弹簧作用下复位。弹簧足夠长、始终在弹性限度内。
48.要完成一个动作且动作、完成后再复位,就必须有上述一组完整的动力装置。
49.图5、多组动力装置构成密集排布成动力系统图。
50.要完成多个动作且每个动作完成后必须复位,就必须多组动力装置构成动力系统。
51.整个动力系统图分四组动力装置,左上部分为第一组动力装置,由于拉丝和套管可弯曲,在第一组动力装置的右边基板上可再安装相同的第二组动力装置,在第一组动力装置的下边基板上可以安装相同的第三组动力装置,在第三组动力装置的右边基板上可以安装相同的第四组的动力装置。安装动力装置的组数视需要动作的多少而定。
52.所述基板是同一块较大的基板,由此构成密集排布的动力系统。
53.所有的拉丝、套管可以弯曲后巧妙地从旁边绕过前面部件、最终各拉丝拉动左边
头部对应的机构。前面部件不会阻挡后面部件。
具体实施方式
54.制作并安装下列构件:基板(1)上固定有导轨(2),滑块(3)能在导轨(2)上滑动,运动的直角件(4)固定在滑块(3)上随滑块(3)运动,静止的直角件(5)固定在基板(1)上不动,运动的直角件(4)的竖直平面上开孔并固定有螺帽(6),丝杆(7)穿过螺帽(6)和穿过竖直平面,丝杆(7)与螺帽(6)匹配,连轴器(8)与丝杆(7)和电动机(9)的轴相匹配,电动机(9)依托支架与基板(1)固定,运动的直角件(4)的竖直平面上开有孔、第一钻夹头(10)穿过孔、且与竖直平面固定,静止的直角件(5)的竖直平面上开有孔、第二钻夹头(11)穿过孔、且与竖直平面固定,第一拉丝(12)向右穿过第一钻夹头(10)、向左穿过套管(13)直至与左端需要垃动的手术器械构件相连,套管(13)穿过第二钻夹头(11),当拧紧第一钻夹头(10)的螺母时第一钻夹头恰能夹住第一拉丝(12),当拧紧第二钻夹头(11)的螺母时第二钻夹头(11)恰能夹住套管(13)。
55.静止的直角件(5)与基板(1)固定不动,所述静止的直角件(5)的竖直平面上开有孔、第三钻夹头(14)穿过、且与静止的角件(5)的竖直平面固定,第二套管(15)穿过第三钻夹头(14)、当拧紧第三钻夹头(14)的螺母时、第三钻夹头(14)恰能夹住第二套管(15),第二拉丝(16)向左穿过第二套管(15)直至与左端手术器械相连、第二拉丝(16)的右端与弹簧(17)的左端相连。
56.基板(1)上固定有导轨(2),所述基板(1)上固定有立柱(18)、立柱(18)与弹簧(17)的右端相连。
57.钻夹头的左边部分(19)比孔大、钻夹头不会被向右拉出、钻夹头中间部分(20)有外螺纹,当右端有内螺纹的螺母(21)拧紧在钻夹头中间部分外螺纹上时钻夹头恰能能把细圆柱状的构件(22)夹住,所述把细圆柱状的构件(22)夹住就是把本发明创造的拉丝、套管夹住。
58.用两根拉丝可以实现一个特定动作和复位。比如:左端手术头处的一节手术器械构件(m)需要向上弯折,首先必须拉紧上边拉丝、同时必须让下边拉丝伸长,这样才能实现。
59.第一拉丝(12)向左穿过套管(13)、直至左端的一节手术器械构件(m)、并且相互固定,第二钻夹头(11)固定在静止直角件上并把套管(13)夹住,第一钻夹头(10)把第一拉丝(12)的右端夹住。
60.第二拉丝(16),向左穿过第二套管(15)直至左端的手术器械构件(m)、并且相互固定,向右与弹簧(17)的左端相连,第三钻夹头(14)固定在静止的直角件上并把套管(15)夹住。
61.本发明创造用一根拉丝和连接有弹簧的另一根拉丝实现一个特定动作和复位:
62.本发明创造实际使用时,当左端一节手术器械(m)需要向上弯折时,必须拉紧上边拉丝、使上边拉丝变短、同时与下边垃丝相连的弹簧必定伸长、相当于下边拉丝变长,这样巧妙地实现左端一节手术器械构件(m)向上弯折。当需要复位时,上边拉丝放松、在弹簧弹力作用下弹簧缩短、相当于下边拉丝变短,从而实现复位。如果要使上边拉丝拉紧,只要电动机、连轴器、丝干调节在正转状态,滑块、运动的直角件向右运动即可。如果要使上边拉丝放松,电动机调节在反转状态即可。
63.电动机正转、反转由单片机通过电脑编程控制,另有专利申请。
64.以上仅仅是一组完整的动力装置,完成一个动作、并且复位、必须有一组完整的动力装置。
65.手术头机构复杂且要完成多个动作,每个动作都要复位,就必须要多组动力装置构成动力系统。
66.构成密集排布动力系统技术方案:
67.由于拉丝和套管可弯曲,在第一组动力装置的右边基板上可再安装相同的第二组动力装置,在第一组动力装置的下边基板上可以安装相同的第三组动力装置,在第三组动力装置的右边基板上可以安装相同的第四组动力装置,所述基板是同一块较大基板,由此构成密集排布的动力系统,拉丝、套管可以弯曲后巧妙地从旁边绕过前面部件、从而各拉丝可以拉动左端的手术头上对应的机构,前面部件不会阻挡后面部件。
68.套管为很细的空心的、不会被压瘪、不会受到压力而缩短的但能弯曲的毛细管,拉丝更细恰能从毛细管中穿过,拉丝不会受拉力而伸长、但能弯曲,多组套管、拉丝的外面被同一根保护管所包裹后,再穿过内窥镜的预留通道进入人体。
69.手术头各机构另申请专利。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1