基于实时温度感知的口腔种植机器人一钻备孔操作方法与流程
1.本发明属于口腔种植机器人领域,涉及一种基于实时温度感知的口腔种植机器人一钻备孔操作方法,属于非疾病治疗方法。
背景技术:
2.口腔种植(或称种植牙、种牙、植牙)以其特有的安全、美观、舒适等优点,被誉为人类继乳牙、恒牙后的第三副牙齿,逐渐成为牙缺失患者的首选修复方式。种植修复的基础理论是源自上世纪50年代瑞典branmark教授的口腔种植体“骨整合”理论,通过种植体与牙槽骨形成良好的骨结合,获得种植体良好的稳定性,这是口腔种植成功的根本基础。口腔种植是通过种植手机上的钻针在颌骨内制备种植窝洞(或称备孔,种植手机或简称手机、与钻针、种植窝洞是口腔医学专用名词)并植入人工种植体,保证种植体在颌骨中具有较好的稳定性,包括初期稳定性和长期稳定性,进而为其上的基台和义齿提供支撑以及咬合力支持。
3.自现代口腔种植学提出以来,口腔种植技术得到了长足发展,目前临床上的种植技术包括自由手操作、基于导板的静态导航、基于视频的动态导航、以及手术机器人种植,而与前三种种植技术比起来,手术机器人具有更高的精确性、稳定性以及可重复性,因此近年来,手术机器人成为了种植手术的重要发展方向,相继出现了获得fda批准的美国辅助式种植机器人yomi系统和国内空军军医大学赵铱民教授团队开发的完全自主式种植机器人系统。
4.目前的手术机器人辅助口腔种植主要应用于备孔环节,其过程本质是利用钻针对牙槽骨的骨组织进行钻削和挤压,过程中会产生大量热量,虽然部分热量会通过骨屑、血液、冷却水等散发,但仍有部分热量会传递至骨骼内使手术区附近骨组织温度升高,当温度升至47℃持续1分钟时(学术界普遍将47℃作用1分钟定义为人体骨组织的热坏死阈值),就会引起骨组织的热坏死,进而影响骨结合的形成。部分患者在种植体植入术后会出现不同程度疼痛,且术后半月ct图像显示,种植体周围出现低密度影像,未形成骨结合,这很大程度上是由于手术备孔过程中存在骨组织灼伤坏死导致的。
5.虽然利用口腔种植机器人辅助口腔种植具有许多优势,但目前的口腔种植机器人在温度感知及温度控制方面依然存在着较大的不足:由于病人口腔内部空间狭小且复杂,因此难以直接将传感器放置于手术位置,目前大多数口腔种植机器人并无温度感知功能,而温度控制大多也是依靠医生经验,仍然存在产热过多致使窝洞内骨组织温度超过47℃的风险。
6.同时出于对温度的控制,目前种植备孔过程均采用逐级扩孔方式,其过程为先使用一小直径的先锋钻在牙槽骨上制备一小直径种植窝,随后更换为更大直径的钻针在上一级制备的种植窝的基础上进行扩孔,重复此操作直至完成种植窝的制备。此操作不仅过程复杂,效率较为低下,同时还会带来重复定位误差,偏离原先的规划。
技术实现要素:
7.为了克服已有技术的不足,本发明提供了一种基于实时温度感知的口腔种植机器人一钻备孔操作方法,在利用口腔种植机器人辅助口腔种植的过程中,为赋予机器人在手术辅助过程中的温度感知能力,对手术辅助过程中的温度进行实时监控,防止在机器人辅助口腔种植手术中由于温度过高给病人带来不可逆的骨损伤,促进病人牙槽骨与种植体骨结合,同时提高口腔种植机器人辅助种植窝制备的效率,降低备孔的重复定位误差,实现一钻备孔操作。
8.本发明解决其技术问题所采用的技术方案是:
9.一种基于实时温度感知的口腔种植机器人一钻备孔操作方法,包括以下步骤:
10.1)温度感知钻针选择
11.根据种植方案内的种植体型号选择选择直径以及长度的温度感知钻针,不同直径的温度感知钻针会影响温度场模型中热源的发热率情况;
12.2)无线测温模块安装
13.将无线测温模块安装在种植手机上,并检查连接的稳定性;
14.3)无线测温模块传输测试
15.备孔前上电启动无线测温模块,同时启动种植手机使其按照设定转速旋转,无线测温模块按照一定频率实时发送温度感知钻针内部温度,且外部接收器开始进行温度数据接收测试,测试数据传输稳定性及数据格式是否无误,并将其储存于信息储存模块中,数据接收测试完成无问题后方可开始执行机器人操作;
16.4)备孔过程中运动参数自适应控制
17.开始执行备孔操作时,上位机获取温度数据,根据温度场模型q(s,t)计算骨组织内温度最高点温度t
max
,同时根据温升率模型计算温升率t
ir
,并将其加入温度自适应参数调控模型tc;
18.过程中的运动参数调控循环如下:
19.首先选择有冷却水模式或无冷却水模式:
20.4.1)有冷却水模式:无线测温模块不断获取测温点数据,上位机根据温度数据推测骨内温度最高点温度及温升率情况,并判断最高点温度及温升率是否在温度自适应参数调控模型中安全范围内,若均处于安全范围则可以提高转速至1000-1200rpm范围,进给速度提高至0.6-1mm/s,以加快备孔速度;若超出则判断温度是否到达警戒温度,若温度低于温度自适应参数调控模型中警戒温度但温升率超出温升率阈值则降低进给速度至0.3-0.6mm/s,将转速调整至800-1000rpm转速,提高冷却水流速到全速以降低温升率,若温度到达警戒温度则提拉钻针同时提高冷却水流速至全速降温,过程中判断是否完成备孔,若一钻备孔完成则流程结束;
21.4.2.无冷却水模式:过程中不使用冷却水,无线测温模块不断获取测温点数据,上位机根据温度数据推测骨内温度最高点温度及温升率情况,并判断最高点温度及温升率是否在温度自适应参数调控模型中安全范围内,若均处于安全范围则可以提高转速至1000-1100rpm范围,进给速度调整至0.5-0.8mm/s,以加快备孔速度;若超出则判断温度是否到达警戒温度,若温度未到达温度自适应参数调控模型中警戒温度但温升率超出阈值则降低进给速度至0.2-0.5mm/s,将转速调整至800-1000rpm范围以降低温升率,若温度超过警戒温
度则提拉钻针进行降温;过程中判断是否完成备孔,若一钻备孔完成则流程结束。
22.上述过程中的具体参数通过将温度数据输入温度自适应参数调控模型中计算后获得。
23.上述过程中一钻即完成种植窝洞的制备。若有攻丝需要,利用螺纹成型钻在种植窝洞内壁形成所需螺纹形态。
24.5)流程结束后,将无线测温模块从种植手机上拆下并进行消毒处理。
25.进一步,所述步骤4)中,备孔温度场模型q(s,t):备孔温度场模型反映的是备孔过程中,钻针与牙槽骨内各点的温度随时间变化情况,其中包含参数有位置s,时间t,传热率及热源发热率,根据温度场内一点的温度情况对温度场内其它位置温度进行计算,使用时根据不同型号的温度感知钻针修改相应的传热参数及热源发热率,利用温度场模型,根据无线测温模块中温度感知钻针内的传感器所测量位置处的温度对骨组织内温度最高处的温度进行计算获得骨组织内最高温度t
max
。
26.再进一步,所述步骤4)中,所述温升率模型t
ir
(n,v,q,t(t)):温升率模型反映的是短时间内温度的变化趋势情况,当温度上升时温升率为正,温度下降时温升率为负其中进给速度v与t
ir
为正相关关系,冷却水流速q与温升率t
ir
为负相关,利用温升率模型对当前温升速度进行计算,进而计算短时间内的温度情况。
27.更进一步,所述步骤4)中,所述温度自适应参数调控模型tc(n,v,q,t(t),t
ir
,tw):温度自适应参数调控模型中反映着钻针转速,进给速度,冷却水流速与温度变化的关系,通过输入实时温度t(t)、温升率t
ir
与警戒温度tw获取机器人运动参数:钻针转速n,进给速度v,冷却水流速q。根据实时温度t(t),温升率t
ir
与警戒温度tw对机器人运动情况进行动态调整,实现温度控制与效率的平衡。
28.所述步骤2)中,所述无线测温模块包括温度感知模块、温度感知钻针、内部连接件、pcb板、无线传输模块、电源模块和外部保护壳,所述温度感知模块位于温度感知钻针内,所述内部连接件套装在温度感知钻针上,pcb板与内部连接件连接,所述pcb板上安装无线传输模块和电源模块,所述内部连接件、pcb板、无线传输模块、电源模块均位于外部保护壳内;所述温度感知模块与无线传输模块连接,所述无线传输模块与所述电源模块连接;
29.所述无线测温模块与外部接收器连接,所述外部接收器与机器人上位机连接。
30.本发明的有益效果主要表现在:1.利用一钻备孔技术,仅用一钻即完成种植窝洞制备,可以极大的提高备孔效率;2.可以不使用冷却水,有利于骨屑的收集和回填再利用;3.可以不提拉钻针或减少提拉次数,提高备孔效率;4.减少过程中由于换钻导致的机器人重复定位误差以及降低备孔流程的繁琐程度;5.赋予机器人温度感知能力,降低种植窝洞制备过程对医生手术经验的依赖,量化处理温度信息,对备孔过程中的温度进行实时监控,可以为医生提供相关信息的参考;6.利用自适应参数模型动态调整机器人运动参数,将温度控制在47℃安全范围内,降低骨组织灼伤风险。
附图说明
31.图1是用于口腔种植机器人末端的温度无线实时测量系统的框图。
32.图2是用于口腔种植机器人末端的温度无线实时测量系统的整体示意图,其中,1为无线测温模块,2为外部接收器,3为机器人上位机。
33.图3是无线测温模块结构的爆炸视图,其中,11为温度感知模块、12为温度感知钻针,13为内部连接件,14为pcb板,15为无线传输模块,16为电源模块,17为外部保护壳。
34.图4是专用测温钻头内部示意图,其中,11为温度感知模块、12为温度感知钻针,18为螺纹。
35.图5是温度场模型示意图,其中,51为热源,52为测温点,53为钻尖,54为骨内温度最高点。
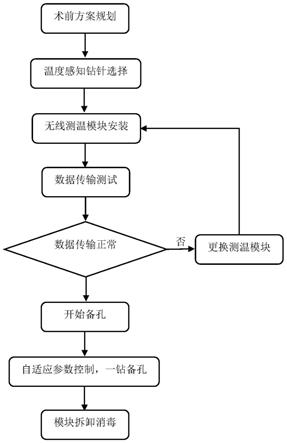
36.图6是一钻备孔技术操作流程图。
37.图7是自适应参数控制总流程图。
38.图8是自适应参数控制有冷却水模式流程图。
39.图9是自适应参数控制无冷却水模式流程图。
具体实施方式
40.下面结合附图对本发明作进一步描述。
41.参照图1~图9,一种基于实时温度感知的口腔种植机器人一钻备孔操作方法,包括以下步骤:
42.1)温度感知钻针选择
43.根据种植方案内的种植体型号选择选择直径以及长度的温度感知钻针,不同直径的温度感知钻针会影响温度场模型中热源的发热率情况;
44.2)无线测温模块安装
45.将无线测温模块安装在种植手机上,并检查连接的稳定性;
46.3)无线测温模块传输测试
47.备孔前上电启动无线测温模块,同时启动种植手机使其按照设定转速旋转,无线测温模块按照一定频率实时发送温度感知钻针内部温度,且外部接收器开始进行温度数据接收测试,测试数据传输稳定性及数据格式是否无误,并将其储存于信息储存模块中,数据接收测试完成无问题后方可开始执行机器人辅助手术操作;
48.4)备孔过程中运动参数自适应控制
49.开始执行备孔操作时,上位机获取温度数据,根据温度场模型q(s,t)计算骨组织内温度最高点温度t
max
,同时根据温升率模型计算温升率t
ir
,并将其加入温度自适应参数调控模型tc;
50.过程中的运动参数调控循环如下:
51.首先选择有冷却水模式或无冷却水模式:
52.4.1)有冷却水模式:无线测温模块不断获取测温点数据,上位机根据温度数据推测骨内温度最高点温度及温升率情况,并判断最高点温度及温升率是否在温度自适应参数调控模型中安全范围内,若均处于安全范围则可以提高转速至1000-1200rpm范围,进给速度提高至0.6-1mm/s,以加快备孔速度;若超出则判断温度是否到达警戒温度,若温度低于温度自适应参数调控模型中警戒温度但温升率超出温升率阈值则降低进给速度至0.3-0.6mm/s,将转速调整至800-1000rpm转速,提高冷却水流速到全速以降低温升率,若温度到达警戒温度则提拉钻针同时提高冷却水流速至全速降温,过程中判断是否完成备孔,若一钻备孔完成则流程结束;
53.4.2.无冷却水模式:过程中不使用冷却水,无线测温模块不断获取测温点数据,上位机根据温度数据推测骨内温度最高点温度及温升率情况,并判断最高点温度及温升率是否在温度自适应参数调控模型中安全范围内,若均处于安全范围则可以提高转速至1000-1100rpm范围,进给速度调整至0.5-0.8mm/s,以加快备孔速度;若超出则判断温度是否到达警戒温度,若温度未到达温度自适应参数调控模型中警戒温度但温升率超出阈值则降低进给速度至0.2-0.5mm/s,将转速调整至800-1000rpm范围以降低温升率,若温度超过警戒温度则提拉钻针进行降温;过程中判断是否完成备孔,若一钻备孔完成则流程结束。
54.上述过程中的具体参数通过将温度数据输入温度自适应参数调控模型中计算后获得。
55.上述过程中一钻即完成种植窝洞的制备。若有攻丝需要,利用螺纹成型钻在种植窝洞内壁形成所需螺纹形态。
56.5)流程结束后,将无线测温模块从种植手机上拆下并进行消毒处理。
57.进一步,所述步骤4)中,备孔温度场模型q(s,t):备孔温度场模型反映的是备孔过程中,钻针与牙槽骨内各点的温度随时间变化情况,其中包含参数有位置s,时间t,传热率及热源发热率,根据温度场内一点的温度情况对温度场内其它位置温度进行计算,使用时根据不同型号的温度感知钻针修改相应的传热参数及热源发热率,利用温度场模型,根据无线测温模块中温度感知钻针内的传感器所测量位置处的温度对骨组织内温度最高处的温度进行计算获得骨组织内最高温度t
max
。
58.再进一步,所述步骤4)中,所述温升率模型t
ir
(n,v,q,t(t)):温升率模型反映的是短时间内温度的变化趋势情况,当温度上升时温升率为正,温度下降时温升率为负其中进给速度v与t
ir
为正相关关系,冷却水流速q与温升率t
ir
为负相关,利用温升率模型对当前温升速度进行计算,进而计算短时间内的温度情况。
59.更进一步,所述步骤4)中,所述温度自适应参数调控模型tc(n,v,q,t(t),t
ir
,tw):温度自适应参数调控模型中反映着钻针转速,进给速度,冷却水流速与温度变化的关系,通过输入实时温度t(t)、温升率t
ir
与警戒温度tw获取机器人运动参数:钻针转速n,进给速度v,冷却水流速q。根据实时温度t(t),温升率t
ir
与警戒温度tw对机器人运动情况进行动态调整,实现温度控制与效率的平衡。
60.本实施例的一钻备孔技术指在对牙槽骨内最高温度控制的基础上,通过选择合适直径的钻针后仅用一钻即完成一个种植窝洞的制备,其关键在于机器人辅助手术过程中的患者牙槽骨手术位置附近的温度测量及利用自适应参数模型实现对备孔过程中骨组织内最高温度的控制。
61.所述步骤2)中,所述无线测温模块1包括温度感知模块11、温度感知钻针12、内部连接件13、pcb板14、无线传输模块15、电源模块16和外部保护壳17,所述温度感知模块11位于温度感知钻针12内,所述内部连接件13套装在温度感知钻针12上,pcb板14与内部连接件13连接,所述pcb板14上安装无线传输模块15和电源模块16,所述内部连接件13、pcb板14、无线传输模块15、电源模块16均位于外部保护壳17内;所述温度感知模块11与无线传输模块15连接,所述无线传输模块15均与所述电源模块16连接。
62.所述无线测温模块1与外部接收器2连接,所述外部接收器2与机器人上位机3连接。
63.进一步,所述温度感知模块11为热电偶或其它温度传感器。
64.所述无线传输模块15包括adc和mcu,所述adc用于将模拟量转换为数字量并送至mcu,所述mcu实现按一定频率对adc数据的读取以及控制无线传输模块对外数据流的传输。
65.所述电源模块16采用超级电容器。
66.所述外部接收器2用于接收由无线模块发送的数据,并将温度数据发送至机器人上位机,采用手机或其它可用于无线连接的设备。
67.所述机器人上位机用于接收温度数据后进行分析处理,并基于温度数据生成相应的机器人运动参数。
68.所述无线传输模块15还包括低功耗无线模块,实现数据流的对外发送。
69.所述温度感知钻针12用于钻孔,且内部有孔道,用于容纳温度感知模块11。
70.本实施例的数据传输路径:温度感知模块的感知端安装于温度感知钻针内部,另一端连接adc,adc将模拟量转换为数字量后传输至mcu,mcu将数据流传输至无线传输模块,无线传输模块将数据流送至外部无线接收器。
71.本实施例的系统运行流程:无线测温模块上电后仅作为从机使用,按照一定频率不断向外传输实时温度数据,外部接收器无线连接到从机后实时进行温度数据接收,并发送至机器人上位机,上位机对温度数据进行分析处理,据此生成机器人运动参数,并将运动参数发送至机器人端。
72.如图1所示,无线测温系统整体包含如下模块:温度感知模块:热电偶或其它温度传感器;pcb板;无线传输模块、电源模块:超级电容器;度感知钻针;结构件:包括内部连接件与外部保护壳;外部接收器:手机或其它可用于无线连接的设备;机器人上位机。
73.温度感知模块11、温度感知钻针12、内部连接件13、pcb板14、无线传输模块15、电源模块16和外部保护壳17,所述温度感知模块11位于温度感知钻针12内,所述内部连接件13套装在温度感知钻针12上,pcb板14与内部连接件13连接,所述p内部连接件上安装无线传输模块15、电源模块16,所述内部连接件13、pcb板14、无线传输模块15、电源模块16均位于外部保护壳17内;
74.所述温度感知模块11与pcb板14连接,所述pcb板14与无线传输模块15连接,所述pcb板14和无线传输模块15均与所述电源模块16连接。
75.其数据交换路径为:温度感知模块温度感知端安装于温度感知钻针内部,另一端连接adc,adc将模拟量转换为数字量后传输至mcu,mcu将数据流传输至无线传输模块,无线传输模块将数据流送至外部接收器,外部接收器将数据传输至机器人上位机。
76.如图2所示,术中无线测温模块整体安装于种植手机上,采集到温度数据后将温度数据发送至外部接收器,外部接收器将数据传输至机器人上位机。
77.如图3所示为无线测温模块结构爆炸视图,其包含如下模块:温度感知模块:热电偶或其它温度传感器;adc;mcu模块;低功耗无线模块;电源模块:超级电容器;温度感知钻针;结构件。
78.其中adc、mcu、低功耗无线模块集成为无线传输模块如图所示。无线传输模块与电源模块一起安装于一环形pcb板上。pcb板中间有孔,以连接内部连接件,内部连接件通过螺纹安装在温度感知钻针上。
79.外部保护壳罩于外部,隔离内部电子元件与外部环境,但外部保护壳不与1至6接
触,其一端安装于种植手机。
80.温度感知模块一端埋藏于温度感知钻针内部,一端通过温度感知钻针上的小孔伸出并连接pcb板。
81.如图4所示为温度感知钻针剖视示意图,其内部有孔道,用于插入温度感知模块。外围有螺纹,用于连接内部连接件。
82.如图5所示为温度场模型示意图,温度感知模块末端为测温点,钻针与牙槽骨接触位置为热源,测温点与钻尖位置关系已知,根据测温点处温度可推测钻尖处的温度情况,而钻尖与牙槽骨接触,进而推导牙槽骨内最高温度处温度变化情况。
83.如图6所示为一钻备孔技术操作流程图,操作流程如下:1.术前方案规划;2.选择合适温度感知探针;3.安装无线测温模块;4.数据传输测试,若信号传输稳定则继续后续流程,若传输不稳定则排查原因,更换无线测温模块,重复3与4步骤;5.通过数据传输测试后准备开始备孔;6.备孔过程中进行自适应参数控制,实现一钻备孔;7.备孔结束后拆下无线测温模块并进行消毒处理。
84.如图7所示为自适应参数控制流程图,过程中的循环如下:首先选择有冷却水模式或无冷却水模式,之后按照相应模式进行机器人运动参数调整,过程中检测是否已完成备孔,若备孔完成则结束温度自适应参数控制。
85.如图8所示为自适应参数控制有冷却水模式流程图,其循环如下所示:无线测温模块不断获取测温点数据,上位机根据温度数据推测骨内温度最高点温度及温升率情况,并判断最高点温度及温升率是否在温度自适应参数调控模型中安全范围内,若均处于安全范围则可以提高转速至1000-1200rpm范围,进给速度提高至0.6-1mm/s,以加快备孔速度;若超出则判断温度是否到达警戒温度,若温度低于温度自适应参数调控模型中警戒温度但温升率超出温升率阈值则降低进给速度至0.3-0.6mm/s,将转速调整至800-1000rpm转速,提高冷却水流速到全速以降低温升率,若温度到达警戒温度则提拉钻针同时提高冷却水流速至全速降温,过程中判断是否完成备孔,若一钻备孔完成则流程结束。
86.如图9所示为自适应参数控制无冷却水模式流程图,其循环如下所示:过程中不使用冷却水,无线测温模块不断获取测温点数据,上位机根据温度数据推测骨内温度最高点温度及温升率情况,并判断最高点温度及温升率是否在温度自适应参数调控模型中安全范围内,若均处于安全范围则可以提高转速至1000-1100rpm范围,进给速度调整至0.5-0.8mm/s,以加快备孔速度;若超出则判断温度是否到达警戒温度,若温度未到达温度自适应参数调控模型中警戒温度但温升率超出阈值则降低进给速度至0.2-0.5mm/s,将转速调整至800-1000rpm范围以降低温升率,若温度超过警戒温度则提拉钻针进行降温;过程中判断是否完成备孔,若一钻备孔完成则流程结束。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1