一种肢体圆周运动对称性检测系统的制作方法
1.本实用新型属于医疗康复器械领域,具体涉及一种肢体圆周运动对称性检测系统。
背景技术:
2.现有的圆周运动康复设备,只能进行主动或被动康复训练,无法单独确定左、右肢体中单肢体的康复状况和肢体在运动过程中协作运动的对称性;
3.例如偏瘫患者在左肢(臂、腕、手或腿、踝、脚)或右肢(臂、腕、手或腿、踝、脚)训练时由于两侧手柄或脚蹬为连轴结构,一侧肢体发力后另一侧会同步做圆周运动,这就造成患者依赖康健的一侧进行发力,导致待训练的一侧始终处于从动状态,降低了康复效果。
技术实现要素:
4.本实用新型为解决上述问题,提供了一种肢体圆周运动对称性检测系统,设置有检测电路和周期检测装置,在一个周期内分别检测左肢发力区间和右肢发力区间带动伺服电机转动产生的能耗,从而获取肢体圆周运动过程中单肢体的发力情况,判断肢体运动协调性。
5.为了实现上述目的,本实用新型的技术方案是:
6.一种肢体圆周运动对称性检测系统,包括用于左肢训练的第一手柄和右肢训练的第二手柄以及分别与第一手柄和第二手柄固定连接的连轴和连轴外部的机壳,所述第一手柄和第二手柄通过连轴转动连接有伺服电机;
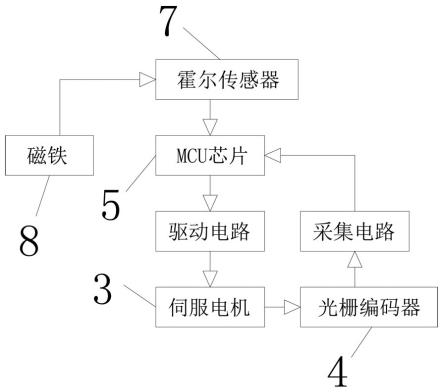
7.所述伺服电机设置有检测电路,所述检测电路用于分别检测第一手柄和第二手柄发力时产生的能耗,所述检测电路包括采集电路和光栅编码器,所述光栅编码器经采集电路连接有mcu芯片,所述采集电路的输出端连接mcu芯片的adc引脚;
8.所述mcu芯片设置有驱动电路,所述驱动电路与伺服电机控制端连接,mcu芯片通过驱动电路调节伺服电机的阻尼值,伺服电机连接光栅编码器;
9.所述第一手柄设置有周期检测装置,所述周期检测装置用于确定左肢和右肢圆周运动一周,所述周期检测装置与mcu芯片的io口连接。
10.进一步地,所述周期检测装置包括设置在机壳外侧的霍尔传感器,对应所述霍尔传感器设置的位置在第一手柄上设置有磁铁;
11.霍尔传感器的输出端与mcu芯片的io口连接。
12.进一步地,所述驱动电路包括正反转电路和两个驱动芯片;
13.所述正反转电路包括四个mos管,四个所述mos管与伺服电机采用h桥驱动方式连接。
14.进一步地,两个所述驱动芯片的输入端与mcu芯片的io口连接,驱动芯片的输出端分别连接四个mos管的栅极。
15.进一步地,所述光栅编码器的输入端连接伺服电机的信号输出端,光栅编码器用
于将伺服电机位移量转化为电信号。
16.进一步地,所述采集电路包括lm258放大器,所述lm258放大器的输入端连接光栅编码器的输出端,lm258放大器的输出端连接mcu芯片的adc引脚。
17.通过上述技术方案,本实用新型的有益效果为:
18.本实用新型包括用于左肢训练的第一手柄和右肢训练的第二手柄以及分别与第一手柄和第二手柄固定连接的连轴和连轴外部的机壳,所述第一手柄和第二手柄通过连轴转动连接有伺服电机;
19.所述伺服电机设置有检测电路,所述检测电路用于分别检测第一手柄和第二手柄发力时产生的能耗,所述检测电路包括采集电路和光栅编码器,所述光栅编码器经采集电路连接有mcu芯片,所述采集电路的输出端连接mcu芯片的adc引脚;
20.所述mcu芯片设置有驱动电路,所述驱动电路与伺服电机控制端连接,mcu芯片通过驱动电路调节伺服电机的阻尼值,伺服电机连接光栅编码器;
21.所述第一手柄设置有周期检测装置,所述周期检测装置用于确定左肢和右肢圆周运动一周,所述周期检测装置与mcu芯片的io口连接。
22.作业时,两肢做圆周运动使第一手柄和第二手柄转动,此时伺服电机处于力矩模式,通过转轴转动带动伺服电机转动;
23.周期检测装置检测转动一周,依据人体运动习惯,存在两个发力区间,且两个区间趋于对称,通过光栅编码器检测圆周运动带动伺服电机产生的位移值确定第一手柄和第二手柄所处位置,并获取该位置角度范围内左肢和右肢的发力产生的位移量,并通过光栅编码器输出电信号至mcu芯片,mcu芯片获取肢体圆周运动过程中单肢体的发力情况,从而判断肢体运动协调性。
附图说明
24.图1是本实用新型一种肢体圆周运动对称性检测系统的电气原理图;
25.图2是本实用新型一种肢体圆周运动对称性检测系统的采集电路的电路图;
26.图3是本实用新型一种肢体圆周运动对称性检测系统的的驱动电路的电路图;
27.图4是本实用新型一种肢体圆周运动对称性检测系统的结构示意图。
28.附图标号:1为第一手柄,2为第二手柄,3为伺服电机,4为光栅编码器,5为mcu芯片,6为机壳,7为霍尔传感器,8为磁铁,9为驱动芯片,10为mos管,11为lm258放大器。
具体实施方式
29.下面结合附图和具体实施方式对本实用新型作进一步说明:
30.实施例1
31.如图1~4所示,一种肢体圆周运动对称性检测系统,包括用于左肢训练的第一手柄1和右肢训练的第二手柄2以及分别与第一手柄1和第二手柄2固定连接的连轴和连轴外部的机壳6,所述第一手柄1和第二手柄2通过连轴转动连接有伺服电机3;
32.所述伺服电机3设置有检测电路,所述检测电路用于分别检测第一手柄1和第二手柄2发力时产生的能耗,所述检测电路包括采集电路和光栅编码器4,所述光栅编码器4经采集电路连接有mcu芯片5,所述采集电路的输出端连接mcu芯片5的adc引脚;
33.所述mcu芯片5设置有驱动电路,所述驱动电路与伺服电机3控制端连接,mcu芯片5通过驱动电路调节伺服电机3的阻尼值,伺服电机3连接光栅编码器4;
34.所述第一手柄1设置有周期检测装置,所述周期检测装置用于确定左肢和右肢圆周运动一周,所述周期检测装置与mcu芯片5的io口连接。
35.作为一种可实施方式,所述周期检测装置包括设置在机壳6外侧的霍尔传感器7,对应所述霍尔传感器7设置的位置在第一手柄1上设置有磁铁8;
36.霍尔传感器7的输出端与mcu芯片5的io口连接。
37.作为一种可实施方式,所述驱动电路包括正反转电路和两个驱动芯片9;
38.所述正反转电路包括四个mos管10,四个所述mos管10与伺服电机3采用h桥驱动方式连接。
39.作为一种可实施方式,两个所述驱动芯片9的输入端与mcu芯片5的io口连接,驱动芯片9的输出端分别连接四个mos管10的栅极。
40.作为一种可实施方式,所述光栅编码器4的输入端连接伺服电机3的信号输出端,光栅编码器4用于将伺服电机3位移量转化为电信号。
41.作为一种可实施方式,所述采集电路包括lm258放大器11,所述lm258放大器11的输入端连接光栅编码器4的输出端,lm258放大器11的输出端连接mcu芯片5的adc引脚。
42.如图4所示,为便于理解以类似于骑单车的肢体圆周运动进行举例说明:
43.在进行肢体圆周运动时,由于此类运动特性,一只脚在下踏第一手柄1时,另一只脚随第二手柄2以连轴的轴心为圆心做向上的圆周运动,直至第一手柄1位于下方,进而第二手柄2趋近于发力点,最终第二手柄2受力转动,直至第一手柄1复位完成一次圆周运动,在一个圆周运动周期内存在左肢发力区间和右肢发力区间;
44.作业时,由于霍尔传感器7的特性,第一手柄1上的磁铁8经过霍尔传感器7位置时,霍尔传感器7将输出电平信号至mcu芯片5,从而确定一个周期结束。
45.圆周运动一圈的位移量一定,根据此类运动特性,发力区间可以基本确定(45
°
~65
°
之间),此时在连轴作用下处于力矩状态的伺服电机3开始转动,光栅编码器4检测伺服电机3位移量和转速,从而可以判断第一手柄1所在位置和第二手柄2所在位置,进而光栅编码器4将发力区间内位移量转换为电信号送至采集电路,mcu芯片5根据两单肢体的发力情况,判断肢体运动协调性。
46.另外通过mcu芯片5可以使用驱动电路调节伺服电机3的阻尼大小以及伺服电机3的转动方向,为康复治疗提供更多的训练模式。
47.以上所述之实施例,只是本实用新型的较佳实施例而已,并非限制本实用新型的实施范围,故凡依本实用新型专利范围所述的构造、特征及原理所做的等效变化或修饰,均应包括于本实用新型申请专利范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1