一种智能艾灸机器人的制作方法
1.本实用新型涉及医疗器械技术领域,特别是一种智能艾灸机器人。
背景技术:
2.随着智能机器人行业的发展,服务、医疗等行业的部分人工操作工作逐步被机器人替代,替代后可以提高工作效率、降低日益增长的人工成本。
3.现有技术中有用于为患者进行艾灸治疗的艾灸机器人,现有技术中的艾灸机器人为了保障安全,通常配有紧急抬升装置,紧急抬升装置通常设置于艾灸机器人的底部,并且与脚杯连接,当艾灸理疗过程中出现异常时,紧急抬升装置会驱动脚杯向下运动,直至脚杯与地面抵接并迅速抬起整个艾灸机器人。
4.由于紧急抬升装置的工作过程十分短暂,目的为了能迅速响应防止患者烫伤。紧急抬升装置需要抬升整个艾灸机器人,其重量较大,在抬起艾灸机器人的动作停下时,会产生较大的惯性,这将会导致整个艾灸机器人在紧急抬升装置停止工作后保持上升一段距离,在艾灸机器人下落时,与地面接触的瞬间,会产生较大的反力,这将会导致整个艾灸机器人发生轻微的移动,可能导致内部控制电路板的电子零件由于冲击损坏或掉落。
技术实现要素:
5.本实用新型要解决的技术问题是:提供一种智能艾灸机器人,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
6.本实用新型解决其技术问题的解决方案是:
7.一种智能艾灸机器人,包括车体和关节机器人,所述关节机器人安装于所述车体;所述关节机器人远离车体的一端设有艾灸装置,所述关节机器人与所述车体之间设有机器人升降装置,所述机器人升降装置驱动所述关节机器人沿上下方向运动。
8.通过上述技术方案,可在特定情况下通过机器人升降装置,调节关节机器人的高度。当遇到紧急情况需要抬升艾灸机器人的时候,医护人员可通过操作艾灸机器人,从而使机器人升降装置驱动关节机器人向上运动,从而使关节机器人以及艾灸装置向上远离病患,避免关节机器人工作异常导致病患烫伤。并且通过机器人升降装置驱动关节机器人向上运动,相对于现有技术的顶起整个艾灸机器人,可降低机器人升降装置的负载,并且能降低关节机器人的惯性,能有避免抬升后艾灸机器人所产生的位移,同时能降低艾灸机器人的冲击。
9.作为上述技术方案的进一步改进,所述车体的底部设有万向轮组。
10.通过上述技术方案,万向轮组可方便本智能艾灸机器人的运输。
11.作为上述技术方案的进一步改进,所述车体的底部连接有自动刹车装置,所述自动刹车装置包括脚杯和固定抬起装置,所述脚杯的数量设置为多个,所述固定抬起装置驱动多个所述脚杯沿上下方向运动。
12.通过上述技术方案,采用固定抬起装置加脚杯的方式组成自动刹车装置,同时刹
车装置与万向轮组为相互独立的组件,避免了现有技术中可移动与刹车后平稳这两个相互冲突的技术问题。
13.作为上述技术方案的进一步改进,所述自动刹车装置还包括第二定向滑轨,所述第二定向滑轨沿上下方向延伸,所述第二定向滑轨用于对所述脚杯进行导向。
14.通过上述技术方案,第二定向滑轨能对脚杯的移动进行导向,并且能使脚杯不受关节机器人运转的影响出现晃动的情况。
15.作为上述技术方案的进一步改进,所述车体设有操作机。
16.通过上述技术方案,操作机用于操作本艾灸机器人的动作。
17.作为上述技术方案的进一步改进,所述操作机包括六方位调节式支架和控制机,所述控制机包括触摸显示屏和主机,所述控制机与所述六方位调节式支架连接,所述控制机包括触摸显示屏和主机。
18.通过上述技术方案,六方位调节式支架使控制机的位置可调,方便医护人员进行操作,并且控制机的触摸显示屏能使医护人员更加直观和方便的了解到艾灸机器人的工作状况。
19.作为上述技术方案的进一步改进,所述车体设有工作指示灯。
20.通过上述技术方案,工作指示灯用于指示艾灸机器人的工作状态。
21.作为上述技术方案的进一步改进,所述车体设有主电控柜和副电控柜;所述主电控柜用于控制所述关节机器人的工作,所述副电控柜用于控制所述机器人升降装置的工作。
22.通过上述技术方案,主电控柜和副电控柜分别属于两套独立控制系统,极大的提高了安全系数。
23.作为上述技术方案的进一步改进,所述车体设有扶手。
24.通过上述技术方案,扶手能使医护人员移动本艾灸机器人更加顺手。
25.作为上述技术方案的进一步改进,所述扶手设有依据人体工学设计的弧形把手。
26.通过上述技术方案,依据人体工学设计的弧形把手使工作人员握持弧形把手时更加舒适。
27.本实用新型的有益效果是:相对于现有技术的顶起整个艾灸机器人,可降低机器人升降装置的负载,并且能降低关节机器人的惯性,能有避免抬升后艾灸机器人所产生的位移,同时能降低艾灸机器人的冲击。
28.本实用新型用于医疗器械技术领域。
附图说明
29.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单说明。显然,所描述的附图只是本实用新型的一部分实施例,而不是全部实施例,本领域的技术人员在不付出创造性劳动的前提下,还可以根据这些附图获得其他设计方案和附图。
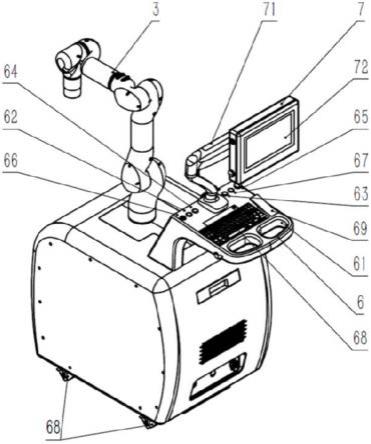
30.图1是本实用新型实施例的整体结构示意图;
31.图2是本实用新型实施例的内部结构示意图。
32.图中,1、车体;11、小车车架;12、静音万向轮;2、机器人升降装置;21、第一顶升缸
体;22、第一定向滑轨;23、机器人固定座;3、关节机器人;4、主电控柜;5、自动刹车装置;51、第二顶升缸体;52、第二定向滑轨;53、脚杯;6、小车扶手;61、弧形把手;62、刹车控制按钮;63、升降复位按钮;64、归位控制按钮;65、安全按钮;66、开关按钮;67、工作指示灯;68、键盘;69、遥控器;7、操作机;71、六方位调节式支架;72、控制机;8、副电控柜。
具体实施方式
33.以下将结合实施例和附图对本实用新型的构思、具体结构及产生的技术效果进行清楚、完整地描述,以充分地理解本实用新型的目的、特征和效果。显然,所描述的实施例只是本实用新型的一部分实施例,而不是全部实施例,基于本实用新型的实施例,本领域的技术人员在不付出创造性劳动的前提下所获得的其他实施例,均属于本实用新型保护的范围。另外,文中所提到的所有联接/连接关系,并非单指构件直接相接,而是指可根据具体实施情况,通过添加或减少联接辅件,来组成更优的联接结构。本发明创造中的各个技术特征,在不互相矛盾冲突的前提下可以交互组合。
34.参照图1和图2,一种智能艾灸机器人,包括车体1和关节机器人3。关节机器人3远离车体1的一端设有艾灸装置。
35.车体1设有小车车架11、小车扶手6、操作机7。车体1下方设有万向轮组,万向轮组包括多个静音万向轮12。
36.小车扶手6与小车车架11固定连接。所述小车扶手6设有根据人体工学而设计的弧形把手61。小车扶手6设有刹车控制按钮62、升降复位按钮63、归位控制按钮64、安全按钮65、开关按钮66和工作指示灯67、键盘68、遥控器69。
37.操作机7包括可六方位调节式支架71和集触摸显示屏、主机于一体的控制机72。
38.所述小车车架11上方设有机器人升降装置2;机器人升降装置2由第一顶升缸体21、第一定向滑轨22和机器人固定座23组合而成。第一顶升缸体21与小车车架11固定连接,机器人固定座23与第一顶升缸体21的输出端固定连接,第一顶升缸体21驱动机器人固定座23沿上下方向运动。第一定向滑轨22对机器人固定座23进行导向。
39.车体1的下方还设有自动刹车装置5;自动刹车装置5包括第二顶升缸体51、第二定向滑轨52和脚杯53。第二顶升缸体51与小车车架11固定连接,脚杯53的数量设置有多个,多个脚杯53安装于一个架子上,第二顶升缸体51的输出端与该架子连接,第二顶升缸体51驱动该架子沿上下方向运动。
40.医护人员通过升降复位按钮63启动第二顶升缸体51,让脚杯53接触地面并抬起整个艾灸机器人以对艾灸机器人的位置进行固定,此时移动小车成为了固定的平台,可确保智能艾灸机器人在其上面平稳运转。第二定向滑轨52能对脚杯53的移动进行导向,并且能使脚杯53不受关节机器人3运转的影响出现晃动等情况。
41.车体1内腔设有主电控柜4和副电控柜8,主电控柜4用于控制关节机器人3的工作,副电控柜8用于控制机器人升降装置2以及自动刹车装置5的工作。以上两电控柜分别属于两套独立控制系统,极大的提高了安全系数。
42.可在特定情况下通过控制按钮启动第一顶升缸体21,调节机器人固定座23的高度。当遇到紧急情况需要抬升艾灸机器人的时候,医护人员可通过控制按钮使第一顶升缸体21工作,从而使机器人升降装置2向上运动,从而使关节机器人3以及艾灸装置向上远离
病患,避免关节机器人3工作异常导致病患烫伤。并且通过第一顶升缸体21驱动关节机器人3向上运动,相对于现有技术的顶起整个艾灸机器人,可降低机器人升降装置2的负载,并且能降低关节机器人3的惯性,能有避免抬升后艾灸机器人所产生的位移,同时能降低艾灸机器人的冲击。
43.以上对本实用新型的较佳实施方式进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本实用新型精神的前提下还可作出种种的等同变型或替换,这些等同的变型或替换均包含在本技术权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1